RT Thread CAN驱动框架分析
CAN 设备
CAN 简介
CAN 是控制器局域网络 (Controller Area Network, CAN) 的简称,是由以研发和生产汽车电子产品著称的德国 BOSCH 公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。
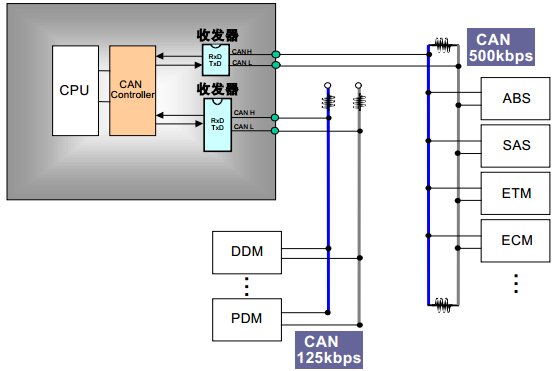
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。 CAN 的连接示意图如下图所示:
CAN 总线有如下特点:
- CAN 总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
- 多主控制。在总线空闲时,所有的单元都可开始发送消息(多主控制)。多个单元同时开始发送时,发送高优先级 ID 消息的单元可获得发送权。
- 消息的发送。在 CAN 协议中,所有的消息都以固定的格式发送。总线空闲时,所有与总线相连的单元都可以开始发