用于汽车毫米波雷达的四维高分辨率点云图像
在车载毫米波雷达领域,近期发展的四维(4D)雷达概念可以提供高分辨率点云图像,并增强成像性能。目前,由于多普勒和角度分辨率的限制,单帧图像的点云密度通常过于稀疏,无法满足目标分类和识别的需求。针对上述问题,本文提出了一种用于生成具有极高多普勒和角度分辨率的4D高分辨率点云图像的新算法。针对高动态范围内的多普勒分辨率,本文提出了一种新的速度模糊分辨算法,该算法采用双脉冲重复频率(dual-PRF)波形设计,并嵌入创新的时分复用和多普勒分复用多输入多输出(TDM-DDM-MIMO)框架。同时,提出了一种仅使用单帧数据进行超分辨率到达方向(DOA)估计的有吸引力的复值深度卷积网络(CV-DCN)。具体而言,将阵列数据的空间平滑算子作为网络的输入,并设计一个CV-DCN来学习空间谱的端到端变换,从而有效地保护频谱提取。此外,通过实验分析验证了所提出的超分辨率DOA估计算法的有效性。最后,通过停车场实验获得了点云的四维高分辨率图像。
引言
自动驾驶技术近年来的发展无疑是智能交通领域的热门话题。作为一种历史悠久的传统传感器,汽车毫米波 (mmWave) 雷达凭借其体积小、成本低、全天候工作、距离分辨率高等公认优势,已被广泛应用于高级驾驶辅助系统 (ADAS) 和 L1/L2 级自动驾驶。然而,其低角度分辨率和成像性能的局限性难以满足下一代自动驾驶的需求。新兴的高分辨率四维成像雷达 (4D 雷达) 作为下一代 77G 汽车毫米波雷达的主要竞争产品,能够在距离、方位角、仰角和时间维度上提供高质量的 4D 点云 。因此,4D雷达被视为自动驾驶新阶段毫米波雷达的王牌。
相关工作介绍
目前,在4D雷达技术的探索中,多输入多输出(MIMO)模式已成为一种常见的选择,该模式能够以较少的发射和接收天线数量获得较大的阵列孔径。此外,多芯片级联技术的采用更是锦上添花,随着天线数量的增加,MIMO雷达设计的灵活性也得到了提升。然而,由于通道数量的急剧增加,MIMO技术在4D雷达中的应用也面临更大的挑战。4D点云图像生成的主要挑战包括最优正交波形设计、高动态高分辨率测速、高分辨率到达方向(DOA)估计等。下文将对这些问题进行详细讨论,并介绍相关工作。
1、正交波形设计:为了有效利用波形分集增益并实现MIMO虚拟阵列综合,波形正交性是4D雷达的关键前提。实现波形正交性的主要技术如下。最简单、应用最广泛的方法是时分复用 (TDM) 技术,但需要注意的是,理想的波形正交性是以牺牲MIMO的传输能力和增大脉冲重复间隔 (PRI) 为代价的。相比之下,在码分复用MIMO (CDM-MIMO) 方案中,多个发射机可以同时发射波形,但需要在每个脉冲周期内采用不同的随机码进行调制。 MIMO 的传输容量得到了有效利用,然而,由于每个发射机的不同编码波形之间不具备理想的正交性,多普勒域中不可避免地会出现高电平干扰。同样,在多普勒分复用 MIMO (DDM-MIMO) 方案中,发射波形由多组线性相位码调制,这些码对于每个发射波形都是不同的,并且在脉冲之间切换 。经 DDM 编码的发射波形在多普勒域中完全分离,并具有不同的多普勒偏移。然而,在多普勒域中识别真实目标与虚假目标,尤其是在多目标场景中,是最困难的挑战。
2、速度模糊解决:在汽车雷达中,当目标的多普勒频率超过脉冲重复频率 (PRF) 的一个周期时,就会出现多普勒模糊。尤其是在采用 TDM-MIMO 方案时,最大不模糊速度与发射机数量成反比。为了解决这个问题,研究人员研究了多种解决方案。例如,在 [14] 中,作者提出了一个采用不同 PRF 的框架,并利用中国剩余定理 (CRT) 来解决模糊问题。[17] 中提出了一种基于不规则脉冲间隔和稀疏信号处理的类似算法。此外,[18] 和 [19] 中的作者基于相位编码方案,利用每个峰值的功率来分离发射信号,从而解决了速度模糊问题,但当目标在距离多普勒 (RD) 图像中重叠时,该方法的效果会严重下降。尤其是在 [19] 中,用二进制码复制的峰值与每个发射机匹配,并对所有可能的匹配进行角度估计,这需要相当大的计算复杂度。同样,[20] 中提出的用于 MIMO 雷达的 M 相移键控 (MPSK) 码在解决速度模糊问题方面仍然存在疑问,因为随着发射机数量的增加,该问题往往容易出现误差。此外,[21] 中的一种算法使用基于 TDM 方案的假设相位补偿,通过与最佳角度估计性能匹配来确定速度。然而,它需要对每个假设速度进行额外的角度估计。基于上述分析,本文提出了一种基于双PRF波形、集成TDM-DDM-MIMO框架的新型速度模糊解算算法,该算法易于实现。值得强调的是,该方案还解决了多目标检测中DDM编码相关的问题。
3、高分辨率DOA估计:为了获得令人满意的4D高分辨率点云图像,高分辨率和高精度的DOA估计至关重要。随着时间的推移,MIMO阵列DOA估计得到了广泛的研究,并取得了巨大的成功。其中,传统的 DOA 估计算法通常是基于物理阵列结构,因此其超分辨性能通常受到阵列孔径长度、阵列缺陷、信噪比 (SNR)、快拍数等因素的限制。例如,基于子空间的方法利用信号子空间和噪声子空间之间的正交性实现了超分辨性能,但受到复杂的特征分解和多快拍数据采集的限制。此外,压缩感知 (CS) 理论将 DOA 估计视为稀疏信号恢复问题,并可通过利用稀疏先验实现超分辨率,但在低信噪比条件下性能会显著下降,且相关算法计算复杂度较高。随着机器学习 (ML) 的发展,利用深度学习 (DL) 这一主要分支进行 DOA 估计有望取得显著成果。与传统算法相比,基于深度学习的 DOA 估计算法能够通过数据驱动学习提取高级上下文信息,从而显著提高估计性能和泛化能力。根据基于深度学习的DOA估计的训练范式,其大致可分为两大类:分类策略和回归策略。
a) 在[33]中,作者将DOA估计视为分类任务,并提出了一个由多任务自编码器和一系列并行多层分类器组成的深度神经网络(DNN)框架,以获得自适应的DOA估计结果。
在相关研究[34]中,作者利用深度卷积神经网络(CNN)将DOA估计问题转化为阵列输出协方差矩阵的逆映射问题,其中“1”表示在相关角度方向上存在信号事件。然而,分类方法通常用于离散问题,难以表示目标相关性、空间谱连续性等关键信息。
b) 相比之下,作者在 [35] 中提出了一种从信号协方差矩阵恢复空间谱的算法,并引入深度卷积网络 (DCN) 来学习回归策略中模拟数据集的变换。该算法在预处理复杂度、计算效率和 DOA 估计精度方面具有优势。尽管取得了一定成果,但由于幅度和相位特性尚未得到充分利用,因此难以从空间谱中提取更详细的局部特征。这会对超分辨率 DOA 估计的性能产生负面影响。为了进一步挖掘空间谱的相位信息,本文采用了复值神经网络,此外,参考自动编码神经网络的结构,提出了一种用于超分辨DOA估计的复值深度卷积网络(CV-DCN)。
贡献
本文提出了一种用于车载4D雷达的高分辨率点云图像生成新算法。本文的主要贡献概括如下:
1) 设计了一种集成的TDM-DDM-MIMO框架,该框架通过简单的正交波形传输实现,并考虑了与DDM相关的目标检测问题;
2) 提出了一种新的速度模糊解决算法,该算法采用双PRF波形设计,并嵌入到所提出的TDM-DDM-MIMO框架中;
3) 为了实现超分辨率DOA估计,提出了一种仅使用单帧数据的新型CV-DCN算法。其中,采用重叠子阵列的空间平滑算法来获取作为网络输入的相关矩阵。此外,该框架采用复值神经网络和自编码器结构,实现了优异的超分辨率性能,能够有效利用空间谱的相位信息;
4)为了进一步验证和评估该方案的有效性,进行了一系列详细的仿真和实际实验。
本文的其余部分安排如下:在第二部分中,我们推导了基本的MIMO信号模型,并简要介绍了TDM-MIMO和DDM-MIMO方案,最终得到了四维坐标的完整表达。在第三部分中,为了实现波形正交性并解决速度模糊问题,我们首先提出了一种新的TDM-DDM-MIMO框架和基于MIMO的速度模糊消除算法。此外,我们还提出了一种新的CV-DCN算法,仅使用单帧数据即可实现高分辨率的DOA估计。接下来,在第四部分中,我们进行了仿真和实际测量实验,以评估该算法的性能。最后,在第五部分中,我们对本文进行了总结。
符号:向量用小写粗体字母表示,矩阵用大写粗体字母表示。(·)T, (·)∗, (·)H 分别表示矩阵的转置、共轭和 Hermitian 运算。rect(·) 是矩形窗口函数。[ · ] 表示将小数点后的数字四舍五入到最接近的整数。E[·] 表示期望运算。(·)、(∗)、(⊛) 分别表示乘法、卷积和转置卷积运算。||·|| 表示 Frobenius 范数运算。|·| 表示绝对值运算。
MIMO雷达信号模型
基本信号模型
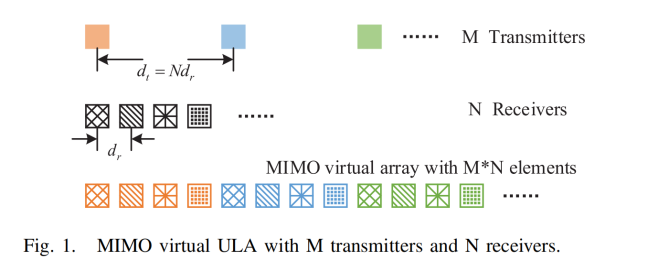
为了简化说明,我们采用了一个包含M个发射器和N个接收器的MIMO均匀线性阵列(ULA),如图1所示。
第m个发射器的线性频率调制(LFM)信号波形可表示为:
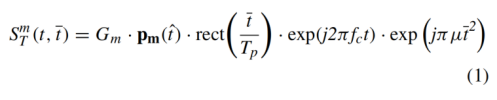
其中,t和t-分别表示连续时间和快时间,tˆ = t − t-表示慢时间变量。Gm是第m个发射机的增益,Tp是脉冲宽度,fc是载波频率,µ是LFM信号的调频速率。特别地,矢量pm(tˆ)充当与预定义的第m个发射机相关的相位调制器,以确保MIMO波形的正交性。目前,由于毫米波调频的限制,相位调制主要应用于脉冲间调制。在上述具有M个发射机的MIMO系统中,离散形式的相位调制矩阵可以表示为:

假设M个发射波形与公式(1)和公式(2)中的相位调制完全正交。假设场景中有K个目标,
第k个目标相对于雷达的速度为vk(目标较远时速度为正),则瞬时距离Rk(t)可表示为:

请注意,上述近似表达式假设目标距离在单个脉冲时间内保持不变。Rk (tˆ) 表示时刻 tˆ 时第 k 个目标与雷达之间的径向距离,Rk0 表示脉冲开始时的初始位置。当第 m 个发射机发射电磁波时,电磁波会入射到 K 个目标上,并从方向 θ = [θ1, θ2, ..., θK ]T 反射回接收机。第 n 个接收机处的回波可以写成:
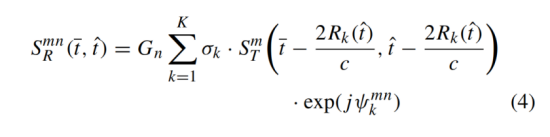
其中,Gn 为第 n 个接收机的增益,σk 为第 k 个目标的散射系数,c 为电磁波的传播速度。ψkmn 为天线阵元位置引起的延迟相位差,在远场假设下可表示为:

其中,λ = c/ fc 为波长,dm 和 dn 分别为第 m 个发射机与参考发射机、第 n 个接收机与参考接收机的基线。θk 为第 k 个目标相对于阵列法线方向的夹角。
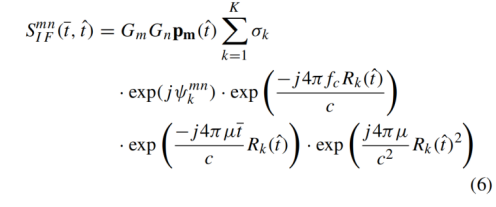
一般而言,毫米波雷达通常在射频 (RF) 模块中采用去调频模式,即将接收到的回波与发射信号混频,得到中频 (IF) 信号。根据公式 (1)、(3) 和 (4),我们可以将回波信号简化为:
然后,方程(6)以离散形式写为:
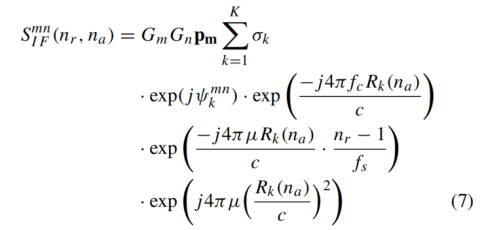
其中,nr = 1, 2, ..., Nr 和 na = 1, 2, ..., Na 分别为脉冲样本和脉冲的索引。Nr 和Na 分别为一个脉冲中的样本数和一帧中的脉冲数。此外,tˆ = na/P RF ,PRF 是第 m 个发射机的发射重复频率,fs 是采样频率。

MIMO波形编码的两种方法
为了保证发射波形的正交性,需要详细介绍两种典型的方案。
1) TDM-MIMO方案:作为最常用的技术,TDM-MIMO方案已广泛应用于传统的汽车雷达。参考公式(2),相位调制矩阵的每一行向量都填充二进制序列。线性调频信号调制与慢时间调制相结合,其中序列元素“1”表示发射机处于活动状态,元素“0”表示发射机处于活动状态。
对应于TDM-MIMO方案的相位调制矩阵可以表示为:
显然,由于在任何脉冲时刻只有一个发射机处于活动状态,因此接收机获取的回波数据自然正交,因此无需进行数据分离处理。然而,由于M个发射机挤在这个频谱中,导致最大无模糊速度和传输效率降低了M倍。TDM-MIMO系统的波形实现虽然得到了简化,但由于目标运动导致的各发射波形之间的相位差需要基于精确的速度估计进行校正。
因此,该方法增加了信号处理的难度,并影响了后续角度估计的精度。
2)DDM-MIMO方案:为了进一步减轻低传输容量和较小的无模糊速度范围对高分辨率点云生成的影响,提出了DDM-MIMO方案。相位调制矩阵的行向量是一系列线性相位序列,在多普勒域充当不同的相位调制器。式(2)中的矩阵元素pm表示为:

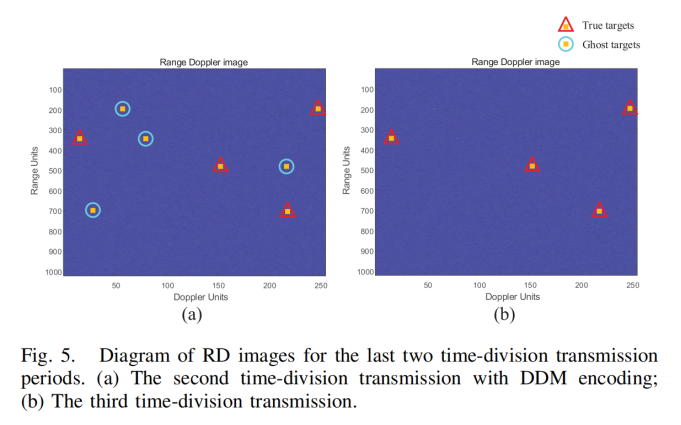
式中,fm是相对于第m个发射波形的多普勒偏移。波形正交性在多普勒域实现,表现为各个波形之间具有不同的预定义多普勒偏移。采用多天线同时传输模式,DDM-MIMO对应的PRF比TDM-MIMO提高了M倍,但在多目标情况下,目标虚警现象更为严重,如图5(a)所示。此外,DDM解码通常是通过在慢时域中乘以编码序列的共轭来解调回波数据来实现的[8]。最后,表1总结了这两种典型方案的优缺点。
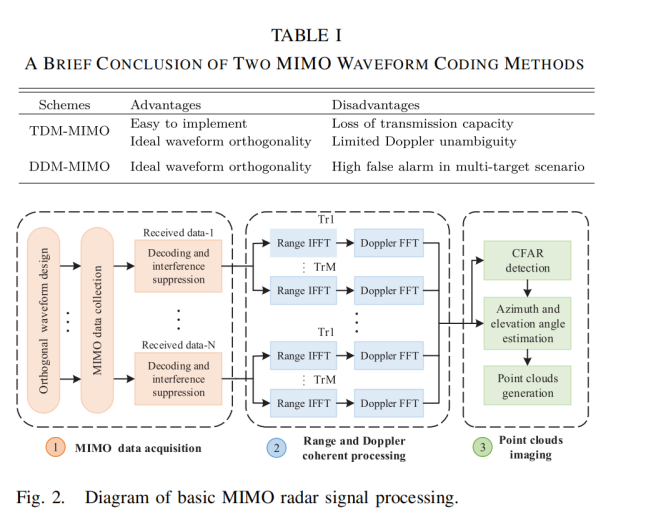
基本雷达信号处理
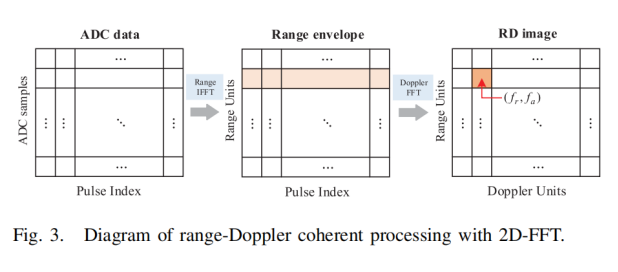
在汽车应用中,MIMO雷达信号处理方案通常包括MIMO数据采集、距离和多普勒相干处理以及点云成像,如图2所示。经过解码和干扰抑制后,获得的多通道数据完全正交。然后,应用雷达信号处理进行距离、速度和角度估计,并用于生成4D点云图像。
对于解码后的MIMO数据,首先对公式(7)中的脉冲样本进行快速傅里叶逆变换(IFFT)。
然后,对脉冲进行快速傅里叶变换(FFT)。最终获得的RD图像如图3所示,可以表示为:
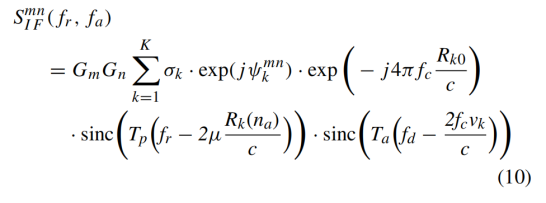
其中,Ta为单帧Na个脉冲对应的相干处理时间。Rk = fr · c/(2µ),vk = fd · λ/2。
经过解码运算和二维快速傅里叶变换 (2D-FFT) 处理后,共可获得M × N通道的RD图像。然后,对上述M × N通道RD图像进行非相干积分,得到集成RD图像。
之后,对集成RD图像进行恒虚警率 (CFAR) 检测,得到K个目标在RD图像中的坐标,从而得到目标的径向距离和速度。为了获得目标的精确坐标,获取精确的角度估计至关重要。假设CFAR检测获得的单个检测点(fr, fa)包含Q个具有相同距离和速度但不同角度的目标,即[θ, φ] = {[θ1, φ1], [θ2, φ2], ...,[θQ, φQ]}T,其中θ和φ分别表示方位角和仰角。参考公式(10)的表达式,目标的角度信息隐含在相位项exp(jψkmn)中,可以通过多通道MIMO数据有效地估计该相位项。为了修改MIMO数据使其能够同时自适应方位角和仰角,公式(10)的多通道数据通常可以扩展为二维阵列形式。
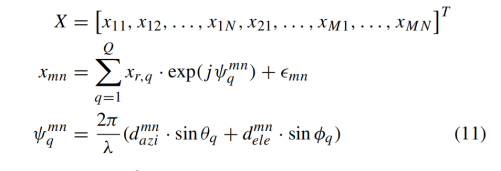
其中 ![]() 表示对应于参考阵元的单次快拍数据,它由 Q 个目标对应的信号分量叠加而成。ϵmn 表示独立复高斯白噪声。
表示对应于参考阵元的单次快拍数据,它由 Q 个目标对应的信号分量叠加而成。ϵmn 表示独立复高斯白噪声。![]() 和
和![]() 分别表示第 mn 个虚拟阵元与参考阵元之间的方位角和仰角基线。需要注意的是,在 TDM-MIMO 模式下,必须补偿各通道之间的运动相位差。
分别表示第 mn 个虚拟阵元与参考阵元之间的方位角和仰角基线。需要注意的是,在 TDM-MIMO 模式下,必须补偿各通道之间的运动相位差。
对于角度估计,存在多种典型的算法,包括传统的数字波束形成 (DBF) 方法、最大似然估计算法 [24]、子空间分类算法(例如多信号分类 (MUSIC) 算法)[25], [26] 等。实际上,二维角度估计可以单独进行,也可以联合进行。为了确定目标的精确位置,参考公式(10)计算距离和速度,并假设已根据公式(11)精确估计目标的方位角和仰角。同一探测点处每个目标的最终四维信息可表示为:
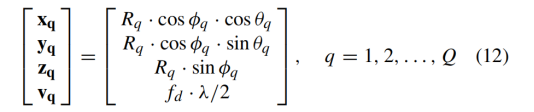
其中 xq、yq、zq 分别表示第 q 个目标与雷达平台的前方、水平和俯仰距离。Rq 和 vq 分别表示 Q 个目标的相同径向距离和速度。
高分辨率点云影像生成
本节重点解决上述挑战,即最优波形正交性设计、高动态高分辨率速度测量和高分辨率到达方向 (DOA) 估计。特别地,我们提出了一种结合创新 TDM-DDM-MIMO 框架的新型速度模糊消除算法,以及一种基于深度学习的超分辨率 DOA 估计算法。
基于MIMO的测速模糊度解析算法
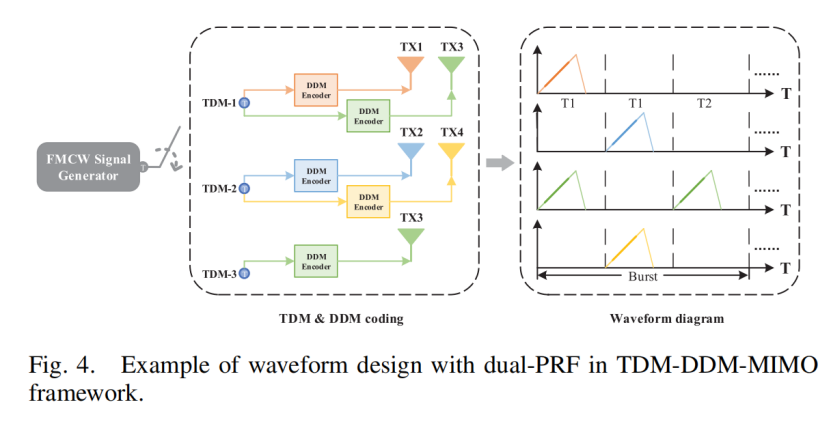
根据前文对TDM-MIMO或DDM-MIMO方案的介绍和分析,单一采用其中一种波形方案几乎不可行。对于先进的4D毫米波雷达,需要采取综合方案,包括充分利用TDM和DDM方案固有的波形正交性,并重点关注多目标场景下的虚警问题。因此,我们提出了一种TDM-DDM-MIMO集成框架。同时,结合双PRF波形的设计,提出了一种有效的速度模糊消除算法。首先,在时分发射模式下,三个均匀分布的发射机在三个相邻的发射周期内依次发射波形,而三个时分波形产生两个不同的PRF。然后,在前两个发射周期内合理分配剩余的发射机,并通过DDM编码发射正交波形。具体而言,在第三个发射周期中仅保持一个发射机处于活动状态,可以实现目标检测,而不会受到DDM编码引起的多目标干扰的影响。此外,对三个均匀排列的发射机对应的回波数据进行干涉相位处理,以提高无模糊速度范围。
为简单起见,以图4所示的示例进行说明。在TDM-DDM-MIMO框架中,四个发射机依次发射。对于每个突发脉冲,多天线发射(采用DDM码编码)的前两个发射脉冲周期表示为T1,单天线发射的第三个发射脉冲周期表示为T2。
在这种时分传输模式下,参考公式(10),混合相位差是由各个通道之间Rk(na)的差异引起的。具体来说,它包括:由于天线阵元位置产生的延迟相位差;以及由于目标运动引起的相位差,
在每个Burst的不同脉冲期间,T X1、T X2和T X3之间的时间分频差内。因此,
相位差可以表示如下:
其中 d1,2 和 d2,3 分别表示 T X1 与 T X2 以及 T X2 与 T X3 的基线,d1,2 = d2,3。ϵ1,2 和 ϵ2,3 是系统误差引起的相位噪声。v 是精确速度,假设其超出了 RD 图像能够表征的最大速度范围,即v > 2vmax,可以改写为:

其中 ξ 是模糊度的整数个数(模糊度阶数),vamb 是从相应的模糊多普勒推算出的残余速度。然后,对于同一接收机,可以计算出混合相位差 ψ1,2 和 ψ2,3 之间的差值:

其中 ϵ▲ψ 是偏离理论值的相位误差,通常可以忽略不计。
接下来,由于 ▲ψ ∈ [−π, π],可以计算出 v 的估计无模糊范围:

与传统的无模糊速度范围相比,无模糊速度范围的增加可以计算为:

通常,直接计算的结果 v 与实际速度 v 之间存在偏差,这主要是由于相位误差造成的。为了减轻干扰,一个非常有效的方法是利用 ξ 为整数且 vamb 准确的先验知识。因此,我们可以先估计 ξ,然后将其代入公式 (14) 来估计速度:
其中 ξ 为估计的模糊度阶数,v 为估计的速度。此外,为了减轻阵列误差和相位不稳定性对估计结果的影响,可以利用多通道 MIMO 数据。相位差 ▲ψ 可以通过所有接收机对应相位的平均值计算得出,其表达式为:

显然,不模糊速度范围得到有效提升,且模糊解算能力取决于▲T = T 2 − T 1。然而,建议合理设计▲T,因为当ζ非常不合理时,不可避免的相位误差会显著影响最终ξ和v的精度。
1) 实验分析:为了验证所提算法的有效性和鲁棒性,进行了仿真实验。基于MIMO的速度模糊解算仿真的主要数值系统参数如下表所示。参照表二中的参数,可计算出原始无模糊速度范围理论上可达[-6.96米/秒,6.96米/秒],经过模糊解算处理后,无模糊速度范围[ -48.70米/秒,48.70米/秒];

第一步,将同一传输周期内的两个发射波形分别采用DDM序列[1, 1, ..., 1]和[1, exp(jπ/2), ..., exp(j(Na-1)π/2)]进行编码。此外,设置四个随机目标,并对不同时分传输周期内的接收数据进行二维快速傅里叶变换(2D-FFT)。在多天线传输的情况下,不同发射机对应的接收数据之间存在独特的多普勒频偏PRF/4,在RD图像中表示为冗余的幽灵目标,如图5(a)所示。由于单发射机对应的RD图像没有幽灵目标的干扰,因此可以将其作为目标检测的标准,如图5(b)所示。此外,可以确定目标的真实多普勒频率,并区分不同发射机对应的接收数据。
接下来,模拟一个目标,其速度在[−48 m/s, 48 m/s ]范围内以 2 m/s 为间隔均匀分布,并在不同的信噪比 {-5 dB,0 dB,5 dB,10 dB} 下进行仿真。速度估计值及其对应的估计误差(100 次测试的平均值)如图 6 所示。
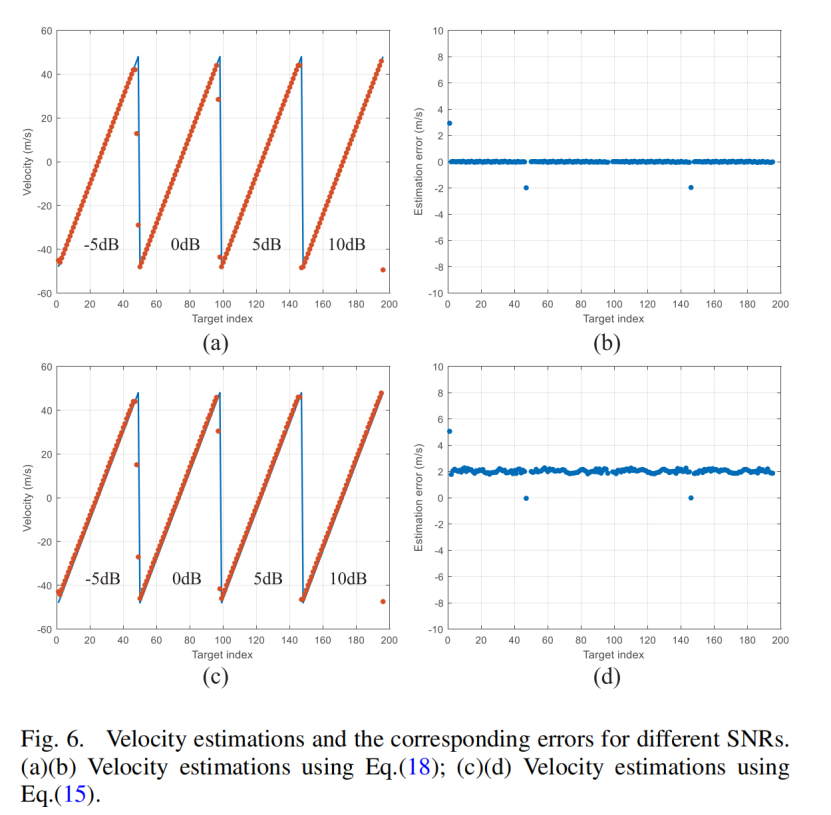
结果表明,所提出的解模糊速度算法在各种信噪比下均能取得良好的效果,且采用公式 (18) 进行速度估计的精度更高。然而,当相位差 ▲ψ 接近 +π 和 −π 的边界时,相位误差 ϵ▲ψ 的影响可能导致相位估计结果相反,速度估计结果也相反。然后,模拟一个典型的目标,其速度为 28.5 m/s,方位角为 0°,信噪比为 10 dB。图7给出了不同条件下MIMO阵列的空间谱响应,其中采用不同的估计速度来校正阵列运动相位误差。显然,采用式(18)估计速度校正相位误差后,空间谱能够准确重构。相反,采用式(15)估计速度或模糊速度补偿相位误差时,重构的空间谱会出现偏差,甚至不正确。
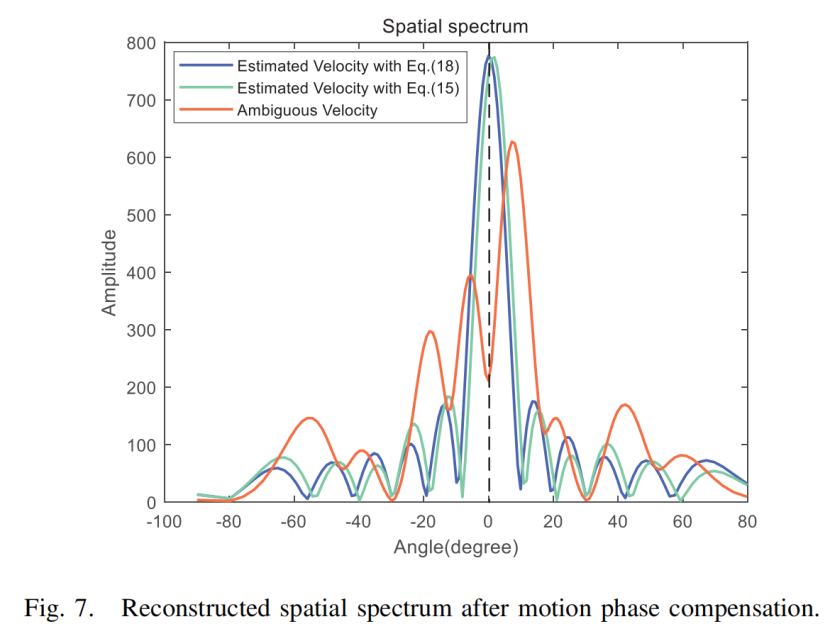
然后,对一个典型目标进行仿真,目标速度为28.5 m/s,方位角为0°,相位噪声为10 dB。图7给出了MIMO阵列在不同条件下的空间谱响应,其中采用不同的估计速度来校正阵列运动相位误差。显然,采用式(18)估计速度校正相位误差后,空间谱重构准确。相反,采用式(15)估计速度或模糊速度补偿相位误差时,重构的空间谱会出现偏差,甚至不正确。
基于DL的DOA估计算法
在汽车雷达应用中,最终四维点云成像结果的质量主要取决于DOA估计的性能。尽管MUSIC算法等传统算法取得了成功,但其在汽车雷达中的实现受到多快拍数据采集和高计算复杂度问题的制约。为了解决上述问题,本文提出了一种基于深度学习的超分辨率DOA估计算法,该算法利用空间平滑算法[42]和深度学习技术。
1) 单快拍数据预处理:对于方位向L单元超阵列阵列(ULA)的MIMO雷达,公式(11)中的阵列输出X可以表示为:
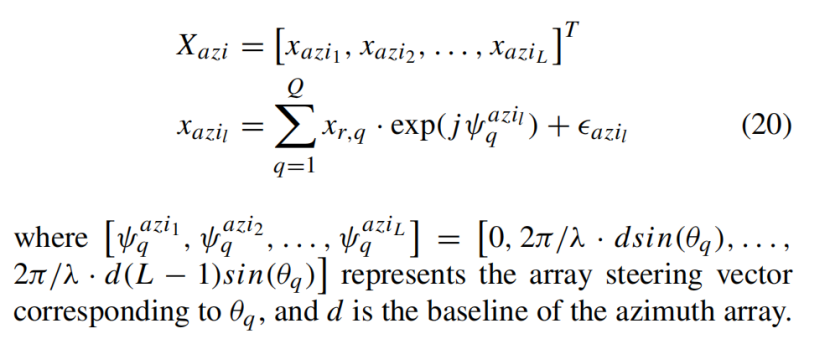
为了从阵列输出Xazi获取源的角度信息,空间谱估计算法通常通过多快拍数据近似构建信号空间相关矩阵。然而,为了满足车载应用的实时性要求,DOA估计必须在单快拍中完成。为此,采用空间平滑算法等效地构建多快拍数据。首先,将L元线阵划分为P个相互重叠的子阵,每个子阵的阵元数为L > Q,Q为源数,L = P + L − 1。
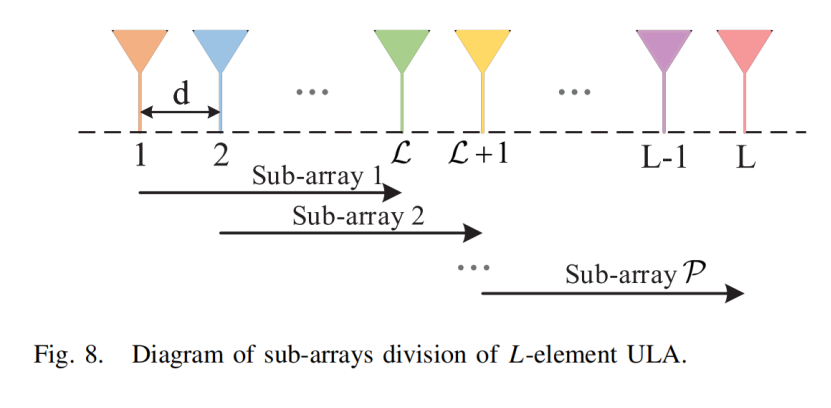
并以第一个子阵为参考子阵,如图8所示,则每个子阵的阵列输出[x1, x2, …, xP]T
可表示为:
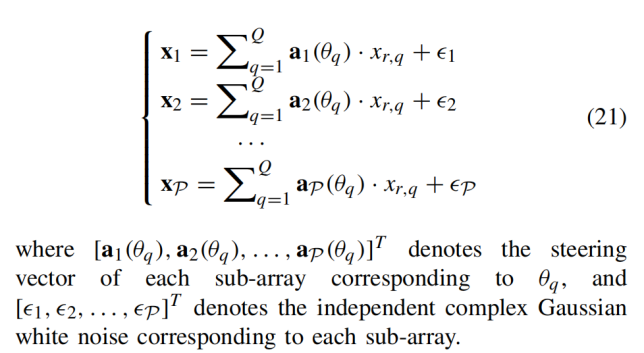
类似地,也采用逆平滑操作,每个逆子阵列的阵列输出可以表示为:

接下来,将各子阵列的单快照数据拼接起来,得到多快照数据,这相当于牺牲阵列的物理孔径来获得时间维度的增加采样。调整后的阵列输出维度为 L × 2P,多快照数据 x (tn) 可表示为:
其中,a(θq)是具有相同阵列流形的子阵列的方向向量。tn = 1, ..., 2(L − L + 1)是快照的索引。然后,构造调整后的多快拍阵列输出x(tn)的信号空间相关矩阵:
为了便于区分,![]() 进一步重新表述,以适应我们提出的 DOA 算法。此外,
进一步重新表述,以适应我们提出的 DOA 算法。此外,![]()
的第 κ 列可以重写为:
从测量向量 r 恢复空间谱![]() 是一个典型的稀疏线性逆问题 [35]。深度学习技术因其强大的学习能力,能够提取尽可能多的潜在数据特征,特别适合解决此类问题。
是一个典型的稀疏线性逆问题 [35]。深度学习技术因其强大的学习能力,能够提取尽可能多的潜在数据特征,特别适合解决此类问题。
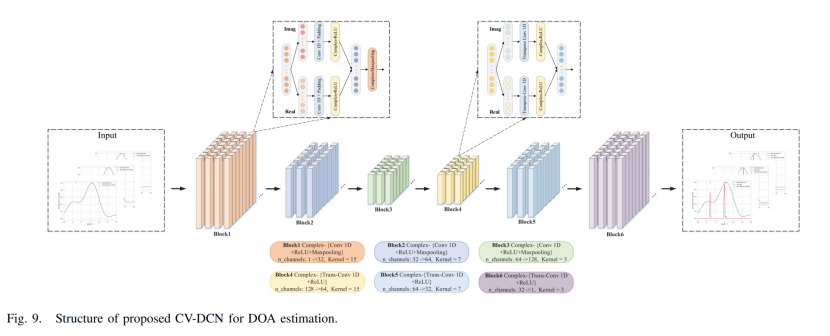
2) CV-DCN 设计:在解决了多快照数据采集和进一步的网络输入问题后,本部分我们主要关注 CV-DCN 的设计。在深度学习领域,CNN [36], [37] 被认为是最流行的 DOA 估计生成模型。基于 CNN 和自编码器的结构,我们设计了一个包含六个块的多层 CV-DCN,如图 9 所示。前三个块对应于底层采样处理,由一维复值卷积 (Complex Conv 1D)、复值 ReLU (CReLU) 和复值最大池化 (Complex max-pooling) 组成。后三个块对应于顶层采样处理,由一维复值转置卷积 (Complex-Trans-Conv 1D) 和 CReLU 组成。
据我们所知,CNN 处理大多数非线性和非凸问题的能力源于其卷积层,它由许多更小的单元——神经元——组成。神经元充当特殊节点,通过卷积核连接前一层和后一层,而卷积核则充当权重矩阵[32]。传统的实值卷积通常将复数数据视为两个独立的输入通道,忽略了数据的相位特性。因此,为了保留相位信息,推导出复数卷积的一维复数卷积,其过程可以用矩阵形式表示如下:

其中,w = a + jb 和 h = x + j y 分别表示复数卷积核和复数向量。![]() 和
和 ![]() 表示复数数据的实部和虚部。其次,作为基于深度学习的 DOA 估计中最常用的激活函数,CReLU(ReLU 的复值形式)也被应用于该框架。其具体形式可以表示为:
表示复数数据的实部和虚部。其次,作为基于深度学习的 DOA 估计中最常用的激活函数,CReLU(ReLU 的复值形式)也被应用于该框架。其具体形式可以表示为:

其中 CReLU 严格满足柯西-黎曼方程,因此可以对复数数据进行微分 [43]。池化层位于激活函数之后,作为辅助特征提取层 [32]。具体而言,池化层减少了神经元的数量和网络的计算量,同时也有助于防止模型过拟合。特别地,常用的最大池化取局部感受野中值最大的点。在实践中,将实数最大池化扩展到复数形式并不容易 [44]。一种自然的方法是简单地取最大振幅。
最后,假设 CV-DCN 中每个块的输入和输出分别表示为 x(n)和 o(n)。此外,x(0) 表示原始频谱的输入数据,则 CV-DCN 第 n 层的输出表示为:
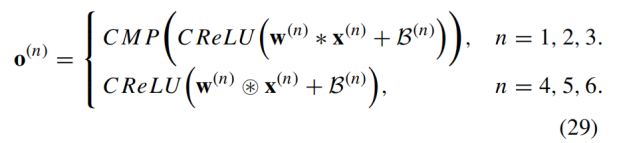
其中 C M P[·] 和 C ReLU[·] 算子分别表示复杂的最大池化和 CReLU 处理。
此外,w(n)和 B(n) 分别表示第 n 个块对应的卷积核和偏置。填充操作发生在卷积处理之前,在边界处对原始输入进行零填充之后,以确保卷积的输出与输入保持相同的向量长度。
此外,该框架的具体参数,例如每个块的卷积核大小、通道数的变化以及向量长度的变化,如图9所示。
3) 学习策略:所提出的基于深度学习的DOA估计框架可以看作是一个黑匣子,充当输入和输出之间的非线性映射变换。并设计了一种学习策略,用于有序地学习这种特殊的映射关系。
在第一阶段,提供了一个类似于[35]的完整数据集构建流程。具体而言,将观测角度范围
[-φ,φ]均匀划分为N个网格,网格间隔为▲θ。在双目标场景中,在预定义的观测范围内依次遍历两个目标之间的夹角▲φ,对于每个夹角,第一和第二个目标的角度分别均匀设置在[-φ,-φ-▲φ ]和[-φ-▲φ,φ ]的范围内,步长为▲θ。
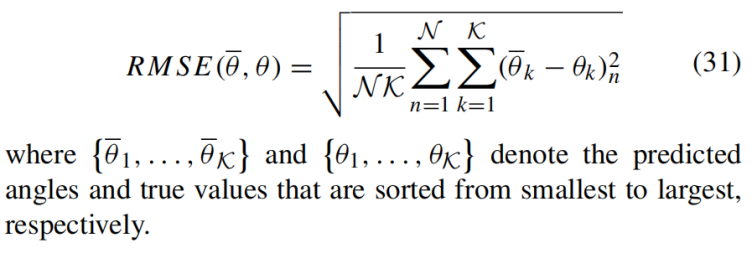
特别地,在每个样本案例中,目标的幅度和初始相位都是随机生成的,信噪比在预设范围内随机分布。然后,对于每个构建的角度集,根据预先设计的MIMO阵列模拟目标回波,并通过空间平滑算法获得相关矩阵,并将其作为网络的输入。此外,为了反映目标集之间的差异,并与公式(24)中的η值相符,计算目标的能量(即幅度的平方)作为相应角度网格的标签值。与设置为“0”和“1”的标签值相比,这增加了数据集的多样性。此外,在幅度、相位和信噪比在特定范围内随机化的条件下,生成一个验证集,该验证集与训练集保持相同的规模、相同的生成方式和相同的数据分布。在第二主要部分中,为了迭代学习原始频谱和标签之间的转换,我们采用了基于均方误差(MSE)的损失函数。特别地,还采用了基于 l1 范数的惩罚项,以增强估计结果的稀疏性,但需要注意的是,惩罚回归的过程同样会导致估计谱主要成分的损失 [45]。损失函数可以表示为:
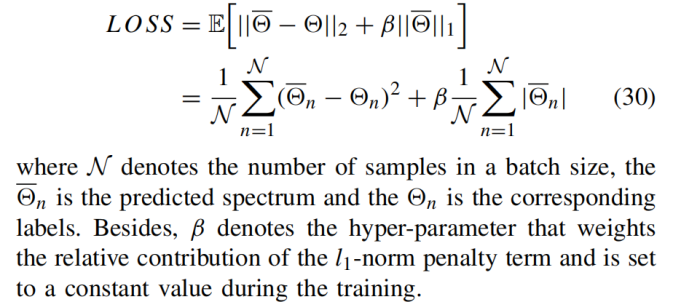
接下来,我们采用自适应矩估计 (Adam) 算法 [46] 迭代优化与所提出的 CV-DCN 算法相关的损失函数。具体而言,在迭代过程中,经过几轮预热过程后,使用余弦退火算法 [47] 动态调整学习率。最后,为了进一步评估预测角度,我们利用常用的 RMSE 度量,并将其重新表述如下:
实验分析
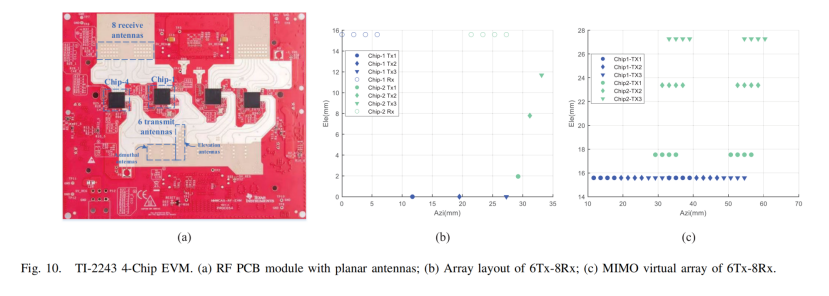
本节开展了超分辨率DOA估计实验和4D点云成像扩展实验,以评估所提算法的性能。本节所有实验均采用TI2243评估模块(TI2243EVM)。图10(a)所示为射频印刷电路板(PCB)模块。实际应用中,我们选取Chip p1和Chip p4级联组成6Tx-8Rx MIMO阵列,虚拟阵列包含一个方位角方向23个阵元的均匀阵列和一个仰角方向的稀疏阵列,分别如图10(b)和(c)所示。此外,23阵元阵列的瑞利分辨率可计算为6.35°。在本研究中,所有深度学习相关的实验均在单个 NVIDIA RTX 3090 GPU 平台上进行,并在 Ubuntu 20.04 Linux 系统上使用 Pytorch 深度学习框架进行。
超分辨率DOA估计实验
在实验设计中,首先基于TI2243EVM的阵列布局构建大规模模拟数据集。
然后,使用模拟数据,以相同的方式训练和评估[35]中提出的CV-DCN算法和DCN算法。同时,还采用了[48]中的平滑MUSIC算法和稀疏贝叶斯学习(SBL)算法进行比较分析。此外,还使用了两种角反射器的实测数据。
1、模拟数据:
首先,使用与TI2243EVM相同的ULA生成模拟数据,该ULA由23个阵元组成,基线为半波长。然后,按如下方式进行网络训练和性能评估。
a) 模拟数据集:参考前述数据集构建步骤,将-60°、59.5°的典型角度范围划分为240个网格,网格间隔为0.5°。然后,在两个目标案例内模拟训练集样本,并以1°、1.5°、……、39.5°、40°的顺序遍历角度间隔▲φ。对于每个角度间隔,将第一和第二个目标的角度均匀设置在[−60°60°-▲φ],[−60°+▲φ,60°]的范围内,步长为0.5°,共得到7880组角度集。特别地,在每个样本中随机生成目标的幅度和初始相位,信噪比在[5dB,30dB]的范围内随机分布。每个角度集随机生成80组回波数据,进一步增加了数据集的规模。此外,通过上述空间平滑操作重建一个尺寸为 12 × 24 的多快照,并导出相关矩阵作为深度学习网络的输入。最终,训练集共收集 630400 个样本,验证集也具有相同的规模。
b) 网络训练:在深度学习模型训练过程中,我们将训练周期 (epoch) 设置为 300,批量大小 (batch size) 设置为 100,初始学习率和权重衰减分别为 10e−4 和 10e−6。此外,超参数 β 设置为 1.2 × 10−3。经过 300 个周期(约 12 小时)的训练后,根据预先定义的评估指标 RMSE 确定最佳模型。为了评估计算复杂度,CV-DCN 和 DCN 算法的浮点运算 (FLOP) 分别为 47.40Mb 和 0.42Mb。同时,两种算法的单次迭代推理时间分别为 1.48ms 和 0.17ms。为了进一步评估DOA超分辨性能,首先采用谱峰搜索法,从预测频谱中确定识别出的目标数量及其伴随角度。接下来评估预测角度与真实值之间的均方根误差(RMSE)。
c) 性能评估:首先,比较提出的CV-DCN和DCN算法的性能。在仿真中,两个目标之间的角度间隔▲φ以0.5°的步长依次在2°、10°之间移动,信噪比分别设置为10dB和20dB。对于每种情况,角度在[-50°、50°]范围内随机设置。经过1000多次蒙特卡洛实验的平均值后,RMSE线绘制在图11中。
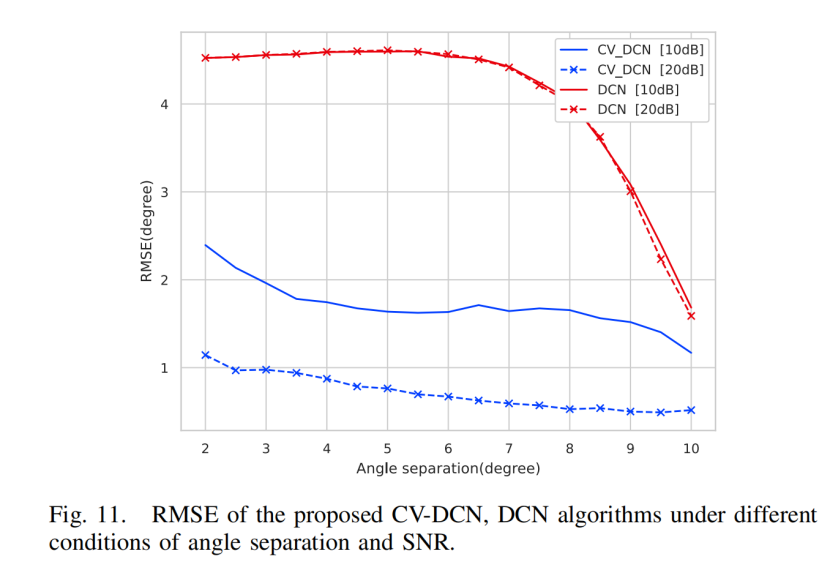
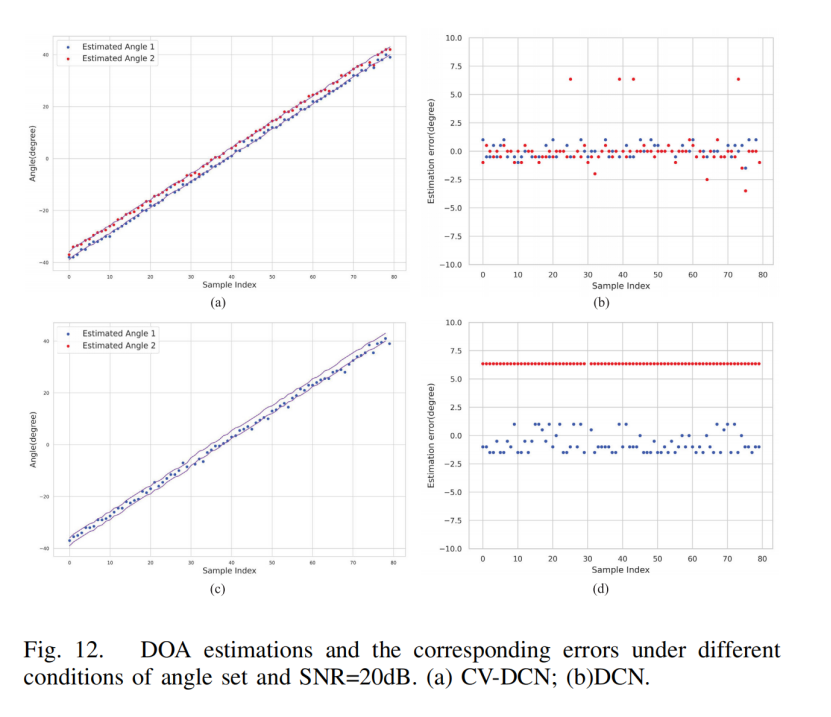
需要注意的是,当两种算法的超分辨能力失败时,瑞利分辨角将被视为脱靶目标(即第二个目标)的估计误差。此时,均方根误差 (RMSE) 急剧恶化,并有效反映了各种算法的分辨性能。如图 11 所示,DCN 算法在较小角度间隔下无法有效区分两个角度,而提出的 CV-DCN 算法表现出更好的分辨性能,并且随着信噪比的增加有改善的趋势。为了进一步验证所提算法的鲁棒性,对两个模拟目标在不同角度下进行实验分析。模拟中,假设角度范围为 -40° 至 40°,角度间隔恒定为 3°,且目标处于离网状态。
在图 12(a) 和 (b) 中,提出的 CV-DCN 算法的 DOA 估计与其真实值吻合良好,大部分估计误差小于 0.5°。需要注意的是,当仅估计一个角度时,未命中目标的估计误差以瑞利分辨率6.35°为基准。图12(c)和(d)分别展示了相同场景下DCN算法的估计结果,可以看出大多数情况下超分辨率性能均不理想。
接下来,我们在两个目标距离小于瑞利分辨率6.35°的条件下评估这三种算法。在角度间隔为2°、3°、4°,信噪比范围为5dB、20dB,步长为1dB的情况下,图13绘制了不同算法的最终RMSE线。可以发现,提出的CV-DCN算法比其他算法表现出更稳定的超分辨率性能。此外,还展示了几个代表性案例。
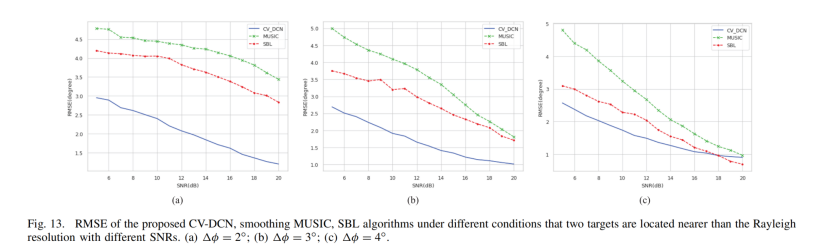
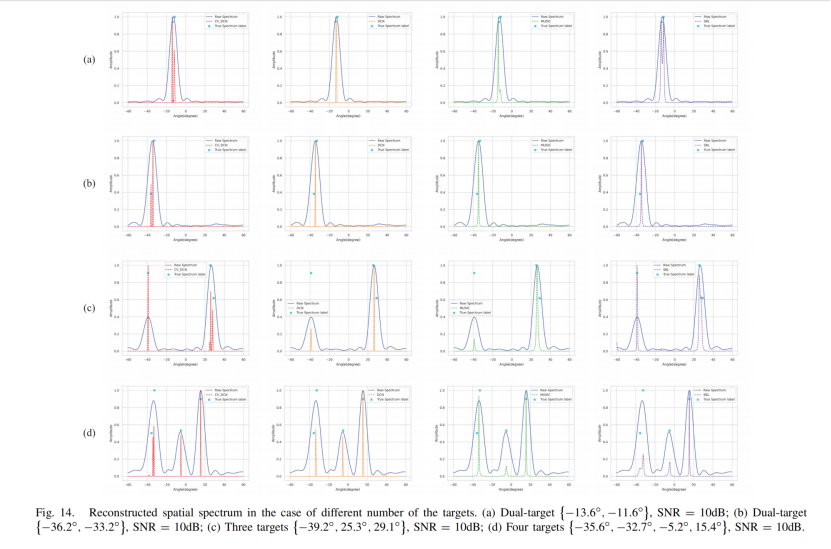
图 14 清晰地展示了双目标和多目标场景下相关的原始频谱、预测频谱和理想标签。需要注意的是,在四组实验中,信噪比均设置为 10dB。可以看出,提出的CV-DCN 算法在双目标和多目标两种情况下均优于其他算法。
2、实测数据:
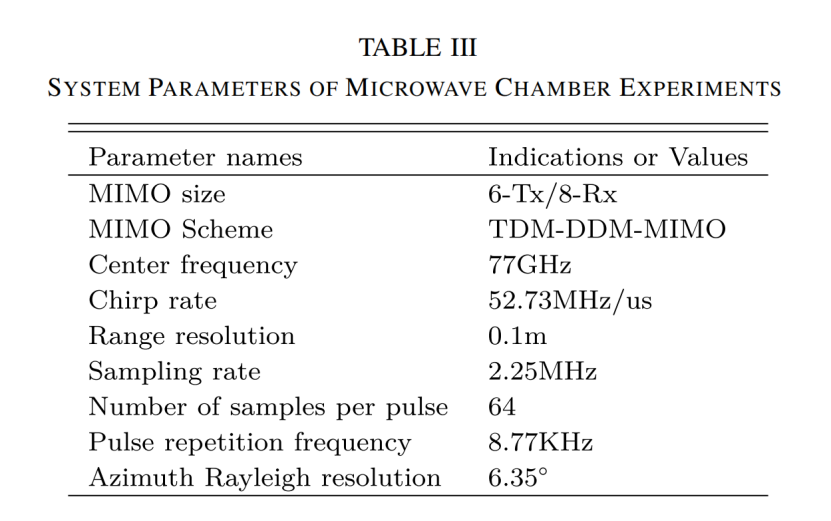
为了进一步说明CV-DCN算法的性能,本文采用了微波暗室的实测数据。主要系统参数列于表III。
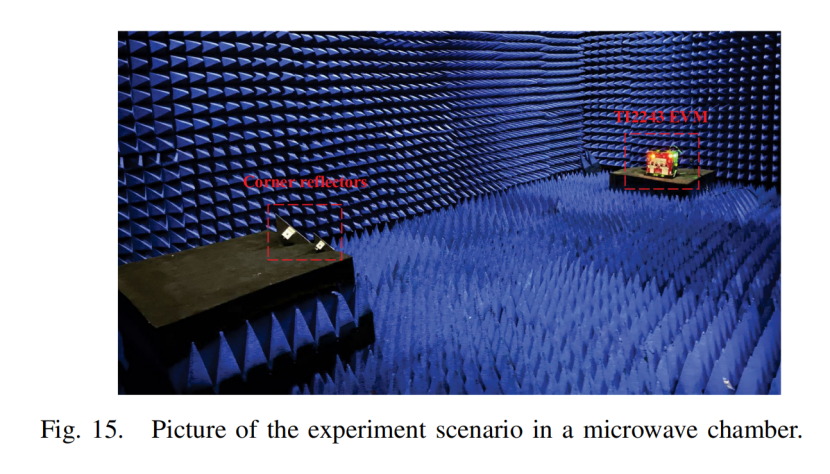
微波暗室实验场景的光学图像如图15所示。
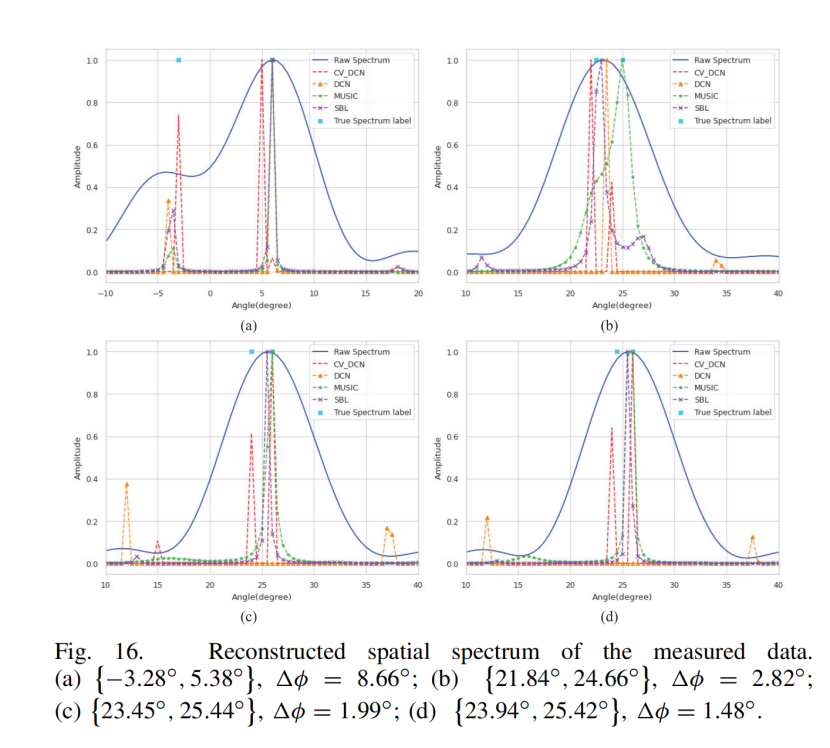
 实验中,首先将两个角反射器以不同的角度间隔放置。通过分别测量获得每个角反射器的标记角度。接下来,使用四种算法重建的空间谱如图16所示。可以发现,所提出的CV-DCN算法仍然保持了高分辨率性能,尤其是在小角度间隔的情况下。然而,该算法也存在一定的估计偏差问题。
实验中,首先将两个角反射器以不同的角度间隔放置。通过分别测量获得每个角反射器的标记角度。接下来,使用四种算法重建的空间谱如图16所示。可以发现,所提出的CV-DCN算法仍然保持了高分辨率性能,尤其是在小角度间隔的情况下。然而,该算法也存在一定的估计偏差问题。
扩展至四维点云成像
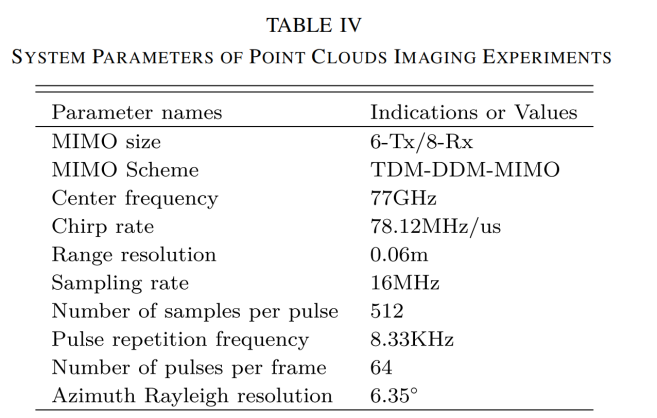
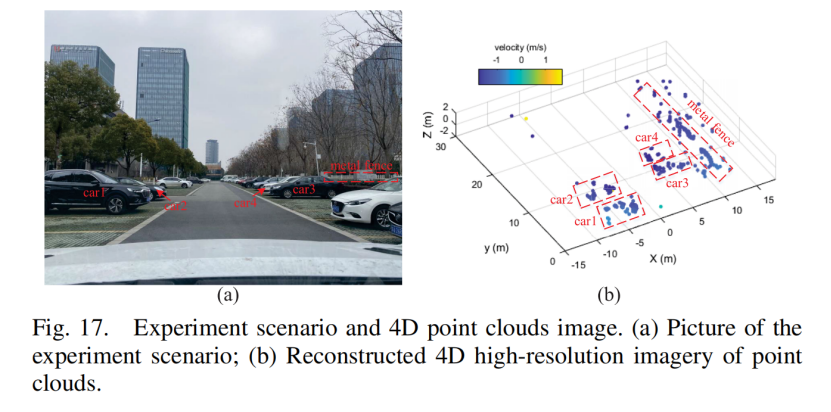
为了验证整体性能,最终实验在停车场进行,如图17(a)所示。所用数据的信噪比足够高,特别是远距离车辆的信噪比经计算约为20dB。4D点云成像所用的系统参数如表IV所示。
在对回波数据进行基本的距离和多普勒相干处理、CFAR检测后,处理后的MIMO数据用于方位向高分辨率成像,采用提出的CV-DCN算法,在方位向获得高分辨率成像结果,采用传统的DBF算法。最终获得相应的4D点云图像,如图17(b)所示。点云图像中主要有四辆汽车以及右侧的金属栅栏,轮廓清晰。
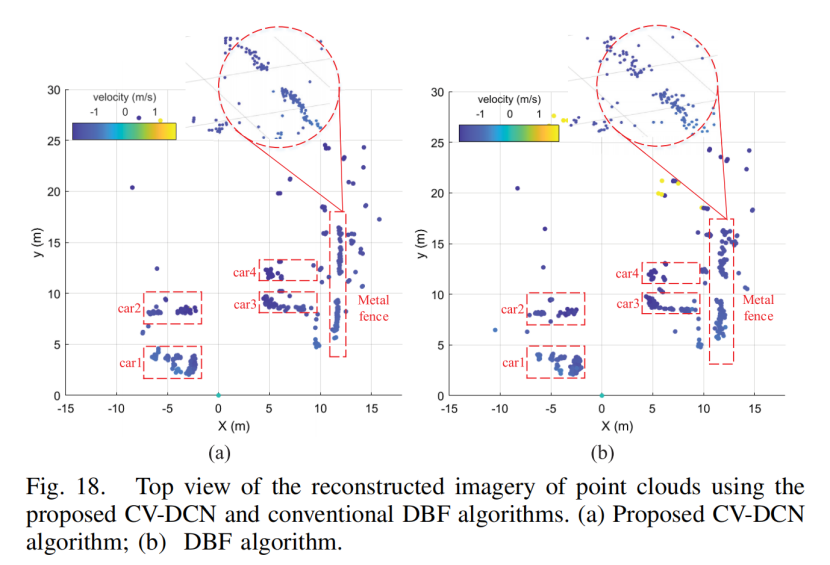
说明提出的CV-DCN算法可以生成更好的4D高分辨率点云图像。对采集到的MIMO数据进行方位角和仰角的二维DBF处理。最后,观察图18所示的俯视图点云图像,可以发现,经提出的CV-DCN处理的方位角结果具有更高的分辨精度,这在金属栅栏的点云中尤为明显。局部放大视图显示,CV-DCN能够有效排除场景中的部分干扰,并具有高分辨率的DOA估计性能,因此点云更加聚焦,并突出了物体的轮廓。
结论
本文提出了一种用于车载MIMO雷达的4D高分辨率点云图像生成新算法。首先,为了实现MIMO雷达的波形正交性,提出了一种TDM-DDM-MIMO集成框架。然后,基于TDM-DDM-MIMO框架,结合双PRF波形设计,提出了一种高效的速度模糊解算算法。为了实现超分辨率DOA估计,首先利用空间平滑算法从单快拍数据中提取多快拍数据,然后借助深度学习网络(DL)提出一种超分辨率DOA估计算法,称为CV-DCN。特别地,为了进一步利用空间谱的相位信息,本文利用了复值神经网络和自编码神经网络的结构。此外,通过多次实验验证了所提出的超分辨率DOA估计算法的有效性。最后,利用实测数据实验获得了四维高分辨率点云图像。作为未来的潜在研究方向,需要提升所提算法在实际应用中的泛化能力。