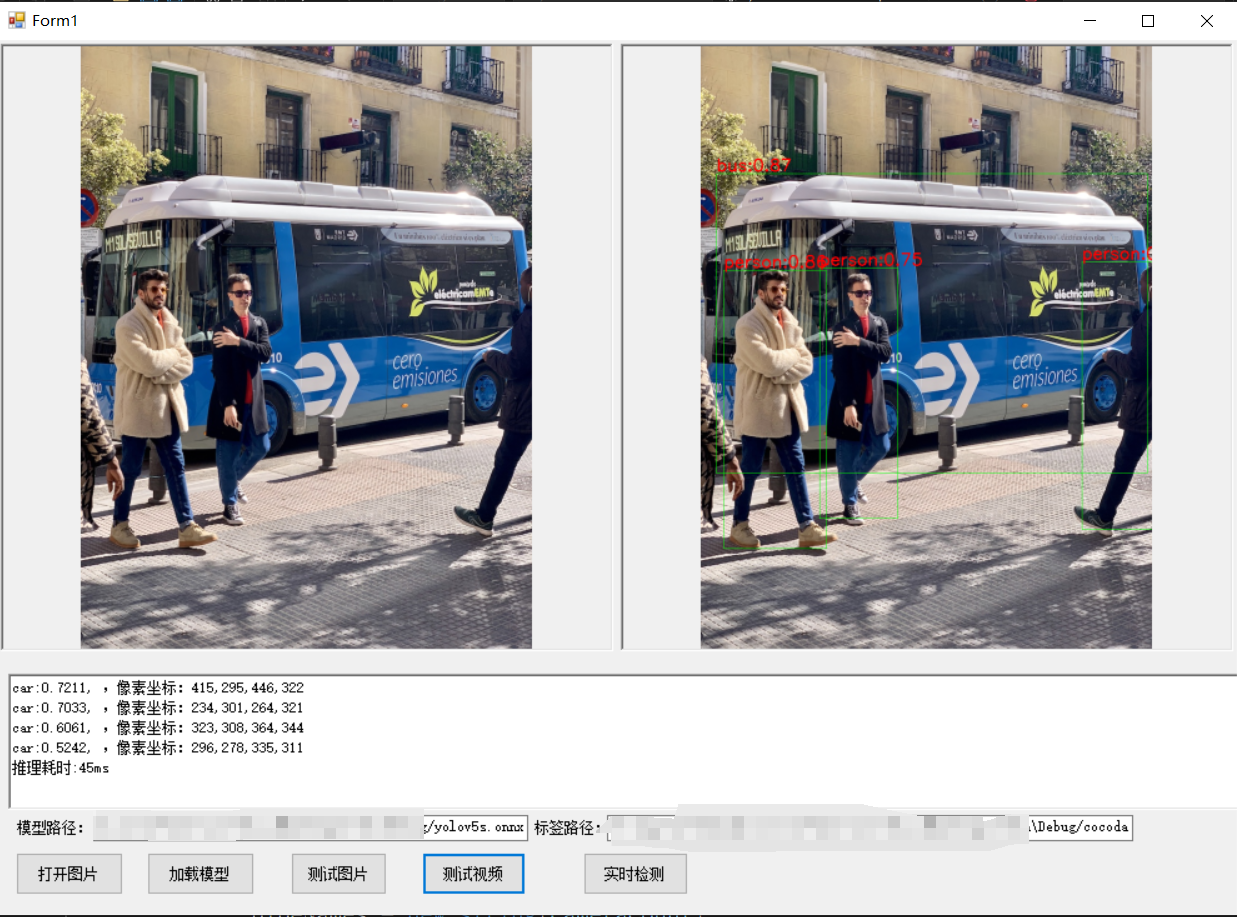
基于C#部署YoloV5目标检测模型
C# YOLOv5目标检测代码详细分析
概述
使用C#和OpenCvSharp库部署YOLOv5目标检测模型,可以对静态图像和视频流(包括摄像头和视频文件)进行目标检测。
public int modelHeight; // 模型输入高度(通常320, 416, 640等)public double confidenceThreshold; // 置信度阈值(0.0-1.0)public bool outResultBmp; // 是否输出带检测框的结果图像
}
DetResult 结构体
检测结果结构体,存储单个检测目标的信息:
public struct DetResult
{public int index; // 类别索引public string label; // 类别标签名称public double confidence; // 检测置信度public Rect box; // 边界框坐标(x, y, width, height)
}
CvDet 核心检测类
类成员变量
private Net net; // OpenCV DNN网络对象
public List<string> classNames; // 类别名称列表
int inpHeight = 320; // 默认输入高度
int inpWidth = 320; // 默认输入宽度
模型加载方法
ReadModel 方法负责加载ONNX模型和类别标签文件:
public bool ReadModel(string modelPath, string classesPath)
功能流程:
- 使用
CvDnn.ReadNetFromOnnx()加载ONNX格式的YOLOv5模型 - 从文本文件中逐行读取类别名称
- 异常处理确保加载过程的稳定性
注意事项:
- 模型文件必须是ONNX格式
- 类别文件每行一个类别名称,顺序对应模型输出的类别索引
图像检测方法
Detect 方法是核心的目标检测功能:
输入验证和预处理
Mat srcImage = BitmapConverter.ToMat(inputBmp);
if(srcImage.Channels() == 1)
{Cv2.CvtColor(srcImage, srcImage, ColorConversionCodes.GRAY2BGR);
}
- 将Bitmap转换为OpenCV的Mat格式
- 确保图像为3通道BGR格式
图像尺寸调整
Mat resizeMat = ResizeImage(srcImage, out newHeight, out newWidth, out paddingHeight, out paddingWidth);
调用自定义的 ResizeImage 方法,保持长宽比的同时调整到模型输入尺寸。
创建输入Blob
Mat blob = CvDnn.BlobFromImage(resizeMat, 1/255.0, new OpenCvSharp.Size(detParam.modelWidth, detParam.modelHeight), new Scalar(0, 0, 0), true, false);
参数说明:
1/255.0: 像素值归一化到[0,1]范围true: 交换R和B通道(BGR转RGB)false: 不进行图像裁剪
模型推理
net.SetInput(blob);
Mat[] outBlobs = new Mat[3] { new Mat(), new Mat(), new Mat() };
string[] outBlobNames = net.GetUnconnectedOutLayersNames().ToArray();
net.Forward(outBlobs, outBlobNames);
- 设置网络输入
- 获取输出层名称
- 执行前向推理
输出处理和解析
int numProposal = outBlobs[0].Size(0);
int nout = outBlobs[0].Size(1);
if (outBlobs[0].Dims > 2)
{numProposal = outBlobs[0].Size(1);nout = outBlobs[0].Size(2);outBlobs[0] = outBlobs[0].Reshape(0, numProposal);
}
适配不同版本YOLOv5的输出格式。
候选框提取(核心算法)
unsafe
{float* pdata = (float*)outBlobs[0].Data;for (int n = 0; n < numProposal; n++){float boxScore = pdata[4]; // 目标存在概率if (boxScore >= detParam.confidenceThreshold){// 获取类别概率Mat scores = outBlobs[0].Row(rowIndex).ColRange(5, nout);Cv2.MinMaxLoc(scores, out minVal, out maxVal, out minLoc, out maxLoc);maxVal = maxVal * boxScore; // 最终置信度if (maxVal >= detParam.confidenceThreshold){// 坐标还原float cx = (pdata[0] - paddingWidth) * Math.Max(ratiow, ratioh);float cy = (pdata[1] - paddingHeight) * Math.Max(ratiow, ratioh);float w = pdata[2] * Math.Max(ratiow, ratioh);float h = pdata[3] * Math.Max(ratiow, ratioh);int left = (int)(cx - 0.5 * w);int top = (int)(cy - 0.5 * h);// 保存检测结果confidences.Add((float)maxVal);boxes.Add(new Rect(left, top, (int)w, (int)h));classIds.Add(classIndex);}}pdata += nout; // 指针移动到下一个候选框}
}
YOLOv5输出格式解析:
pdata[0], pdata[1]: 中心点坐标 (cx, cy)pdata[2], pdata[3]: 宽度和高度 (w, h)pdata[4]: 目标存在概率 (objectness score)pdata[5:]: 各类别概率分布
非极大值抑制(NMS)
float nmsThreshold = 0.5f;
CvDnn.NMSBoxes(boxes, confidences, (float)detParam.confidenceThreshold, nmsThreshold, out indices);
消除重叠的检测框,保留最优结果。
结果可视化
if(detParam.outResultBmp)
{Cv2.Rectangle(resultImage, /* 绘制边界框 */);Cv2.PutText(resultImage, /* 添加标签文本 */);
}
视频检测方法
DetectVedio 方法与图像检测基本相同,主要区别:
- 输入参数为
Mat而非Bitmap - 输出为
Mat类型的结果图像 - 适用于视频流的实时处理
图像预处理方法
ResizeImage 方法实现保持长宽比的图像缩放:
核心算法
float hw_scale = (float)srch / srcw;
if (hw_scale > 1) // 图像高度大于宽度
{newh = inpHeight;neww = (int)(inpWidth / hw_scale);// 左右填充left = (int)((inpWidth - neww) * 0.5);Cv2.CopyMakeBorder(dstimg, dstimg, 0, 0, left, inpWidth - neww - left, BorderTypes.Constant);
}
else // 图像宽度大于高度
{newh = (int)(inpHeight * hw_scale);neww = inpWidth;// 上下填充top = (int)((inpHeight - newh) * 0.5);Cv2.CopyMakeBorder(dstimg, dstimg, top, inpHeight - newh - top, 0, 0, BorderTypes.Constant);
}
填充策略:
- 计算长宽比例
- 按比例缩放到合适尺寸
- 使用黑色像素填充剩余区域
- 确保输出尺寸符合模型要求
使用示例
// 初始化检测器
CvDet detector = new CvDet();// 加载模型
bool success = detector.ReadModel("yolov5s.onnx", "coco.names");// 设置检测参数
DetParam param = new DetParam
{modelWidth = 640,modelHeight = 640,confidenceThreshold = 0.5,outResultBmp = true
};// 执行检测
Bitmap inputImage = new Bitmap("test.jpg");
List<DetResult> results = detector.Detect(inputImage, param, out Bitmap resultImage);// 处理检测结果
foreach(var result in results)
{Console.WriteLine($"类别: {result.label}, 置信度: {result.confidence:F2}");
}
关键技术要点
1. 坐标变换
代码实现了从模型输出坐标到原图坐标的正确变换,考虑了:
- 图像缩放比例
- 填充偏移量
- 中心点坐标转换为左上角坐标
2. 内存安全
使用 unsafe 代码块直接操作内存指针,提高了数据访问效率。
3. 异常处理
在模型加载和推理过程中都有适当的异常处理机制。
4. 性能优化
- 使用指针直接访问输出数据
- 避免不必要的数据拷贝
- 合理的内存管理
后续优化
- 批处理支持: 当前实现为单张图像处理,可扩展支持批量处理
- GPU加速: 可配置使用CUDA或OpenCL后端加速推理
- 多线程: 对于视频处理场景,可实现多线程并行处理
- 动态模型尺寸: 支持运行时调整模型输入尺寸
- 更多后处理选项: 添加跟踪、计数等高级功能
总结
上述代码提供了一个完整、高效的YOLOv5 C#部署方案,适用于Windows平台的目标检测应用。代码结构清晰,功能完整。