03.利用显卡内核模块等特性为算法提速百倍
本章中我们将学习到显卡的多种特性,如原生内核模块、“网格-块-线程”三层计算模型、线程同步和共享内存、CUDA流并发与事件管理等等概念,学习这些概念的目标是为了让算法在设计时充分利用这些特性,以达到十倍百倍降低成本、提高效率、提升速度的目的。
虽然这些都是极其枯燥的概念,但我们会尽量将概念糅合到代码里去,尽量从提升效率、提高速度的方向,去讲解利用好这些概念带来的实质提升效果,这样的理解最为深刻。
3.1 内核函数和设备函数
上一章结尾deepseek给的代码速度比书本里的案例还要快20倍,以下为部分片段:
# CUDA kernel for Mandelbrot set calculation
mandelbrot_kernel = """
__global__ void mandelbrot(float *output, float real_low, float real_high,float imag_low, float imag_high,int max_iters, float upper_bound,int width, int height) {int x = blockIdx.x * blockDim.x + threadIdx.x;int y = blockIdx.y * blockDim.y + threadIdx.y;...
}
"""def gpu_mandelbrot(width, height, real_low, real_high, imag_low, imag_high, max_iters, upper_bound):# Compile the CUDA kernelmod = SourceModule(mandelbrot_kernel)mandelbrot_func = mod.get_function("mandelbrot")...# Execute the kernelmandelbrot_func(output_gpu,np.float32(real_low), np.float32(real_high),np.float32(imag_low), np.float32(imag_high),np.int32(max_iters), np.float32(upper_bound),np.int32(width), np.int32(height),block=block_size, grid=grid_size)阅读源码可知它使用了如下PyCUDA的API:
- SourceModule
- get_function
还有,在其CUDA C实现中,没有任何库引入的情况下,直接使用blockIdx.x * blockDim.x + threadIdx.x和blockIdx.y * blockDim.y + threadIdx.y,这些threadIdx和blockIdx又是什么?接下来为您揭晓。
3.1.1 SourceModule内核函数模块提速
SourceModule是PyCUDA的核心类之一,用于直接编译和加载CUDA C/C++代码到GPU上执行。它可以实现:
- 编写原生的 CUDA 内核(global 函数)
- 使用 CUDA 的所有特性(如共享内存、原子操作、纹理内存等)
- 动态编译代码并生成 Python 可调用的 GPU 函数
跟ds要个HelloWorld:
import pycuda.autoinit
from pycuda.compiler import SourceModule# 编写 CUDA C 代码
kernel_code = """
__global__ void add(float *a, float *b, float *c) {int idx = threadIdx.x;c[idx] = a[idx] + b[idx];
}
"""# 编译代码
mod = SourceModule(kernel_code)
add_func = mod.get_function("add") # 获取内核函数相比于之前学习的ElementwiseKernel,则是PyCUDA提供的一个高阶封装工具,用于快速创建简单的逐元素(element-wise)操作内核这样的特定场景。它可以自动生成内核代码,而无需手动写 CUDA C,比较适合简单的并行操作(如数组相加、乘法等),它在性能上是有一定限制,速度不如SourceModule。
二者对比:
| 特性 | SourceModule | ElementwiseKernel |
|---|---|---|
| 代码复杂度 | 需手动编写 CUDA C 代码 | 自动生成内核,只需写表达式 |
| 灵活性 | 高(支持所有 CUDA 特性) | 低(仅限逐元素操作) |
| 性能 | 更高(可手动优化) | 较低(通用性导致额外开销) |
| 适用场景 | 复杂算法(如前缀和、矩阵乘法、FFT等) | 简单操作(如数组加减、逐点函数应用) |
| 共享内存/同步支持 | 支持 | 不支持 |
SourceModule通常更快的原因如下:
- 更底层的控制:可以手动优化内存访问(如使用共享内存、合并内存访问),支持线程同步(__syncthreads()),适合需要协作的算法。
- 避免抽象开销:ElementwiseKernel 需要解析字符串表达式并生成 CUDA 代码,引入额外开销。SourceModule 直接编译原生代码,无中间层。
- 适用复杂逻辑:例如前缀和算法需要多阶段计算,ElementwiseKernel无法实现。
那么何时可以选择ElementwiseKernel呢?在一些简单操作:如 a[i] = b[i] + c[i] * 2时可以的,或者快速原型开发,且不想写 CUDA C 代码的时候,并且ElementwiseKernel的代码更接近Python风格,可读性较好。
3.1.2 SourceModule比ElementwiseKernel快多少?
同样跟deepseek要一段对比测速代码simple_kernel_speed_compare.py:
import time
from pycuda import gpuarray
import pycuda.autoinit
from pycuda.compiler import SourceModule
import numpy as np
from pycuda.elementwise import ElementwiseKernel# 查询设备最大线程数,这是显卡硬件限制,单block最大多少线程
from pycuda.driver import Device
max_threads = Device(0).max_threads_per_block
print(f"Max threads per block: {max_threads}")# 设置合理的block尺寸(通常256或512是安全值)
block_size = 256# 生成数据
N = 10000000
a = np.random.randn(N).astype(np.float32)
b = np.random.randn(N).astype(np.float32)
a_gpu = gpuarray.to_gpu(a)
b_gpu = gpuarray.to_gpu(b)
c_gpu = gpuarray.empty_like(a_gpu)# 同样逻辑的算法实现
mod = SourceModule("""__global__ void add(float *a, float *b, float *c) {int idx = threadIdx.x;c[idx] = a[idx] + b[idx];}
""")
add_func = mod.get_function("add")add_kernel = ElementwiseKernel("float *a, float *b, float *c","c[i] = a[i] + b[i]","add_kernel"
)# 测试 SourceModule
grid_size = (N + block_size - 1) // block_size
start = time.time()
add_func(a_gpu, b_gpu, c_gpu, block=(block_size, 1, 1), grid=(grid_size, 1, 1))
print("SourceModule Time:", time.time() - start)# 测试 ElementwiseKernel
start = time.time()
add_kernel(a_gpu, b_gpu, c_gpu)
print("ElementwiseKernel Time:", time.time() - start)第一次运行编译耗时增加,第二次开始耗时稳定。
$ /home/roysue/Desktop/EXAMPLES/bin/python /home/roysue/Desktop/EXAMPLES/03/simple_kernel_speed_compare.py
Max threads per block: 1024
SourceModule Time: 0.0009343624114990234
ElementwiseKernel Time: 0.16331028938293457$ /home/roysue/Desktop/EXAMPLES/bin/python /home/roysue/Desktop/EXAMPLES/03/simple_kernel_speed_compare.py
Max threads per block: 1024
SourceModule Time: 0.00021767616271972656
ElementwiseKernel Time: 0.060277462005615234$ /home/roysue/Desktop/EXAMPLES/bin/python /home/roysue/Desktop/EXAMPLES/03/simple_kernel_speed_compare.py
Max threads per block: 1024
SourceModule Time: 0.0001995563507080078
ElementwiseKernel Time: 0.05784893035888672从耗时来看SourceModule比ElementwiseKernel大概快到两百多倍。
3.1.3 显卡的“网格-块-线程”三层计算网络模型
从上一节的源码来看,ElementwiseKernel的计算子是i,而SourceModule的计算子是threadIdx.x,从表面上看这是二者的主要区别:
- threadIdx是CUDA的核心概念,表示当前线程在block中的x维度的索引,在直接使用SourceModule编写的内核函数中,需要手动计算全局索引。
- i这是ElementwiseKernel自动提供的索引变量,ElementwiseKernel是一个抽象的高级封装,会自动处理索引计算和网格配置,它会自动为每个元素分配一个唯一的全局索引i,相当于自动计算了threadIdx.x,使用起来更简单,但效率较低
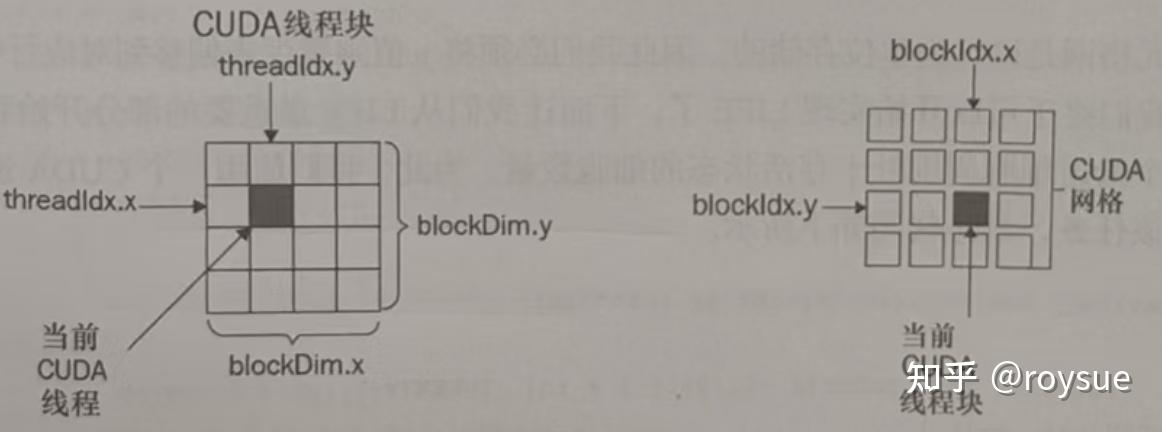
这里引入了新的概念,也就是threadIdx。在 CUDA 编程中,gridDim、blockIdx、blockDim 和 threadIdx 是用于管理 GPU 线程层次结构的关键变量,它们决定了每个线程在计算网格中的位置。理解这些概念对于编写高效的 CUDA内核函数至关重要。
GPU 的并行计算模型采用“网格(Grid)—块(Block)—线程(Thread)”的三层结构:
- Grid(网格):最外层结构,由多个 Block 组成
- Block(块):每个 Block 包含多个 Thread(线程)
- Thread(线程):最基本的执行单元,每个线程执行相同的核函数代码,但处理不同的数据
三层结构示意图:
Grid
├── Block 0 (thread 0, thread 1, ..., thread N)
├── Block 1 (thread 0, thread 1, ..., thread N)
...
└── Block M (thread 0, thread 1, ..., thread N)体现在代码上,CUDA提供的线程索引相关的内置变量是:
- gridDim(Grid 的维度,即每个 Grid 的 Block 数)
- blockIdx(Block 在 Grid 中的索引)
- blockDim(Block 的维度,即每个 Block 的线程数)
- threadIdx(线程在 Block 内的局部索引)
正因为是内置变量,所以不需要显示地导入库即可直接使用,这也正好回答了前文的疑问。
CUDA还提供了以下内置变量来标识线程的位置:
1.threadIdx.x, threadIdx.y, threadIdx.z
表示当前线程在其所属 Block 中的 局部索引(0 开始)。可以是 1D、2D 或 3D 结构(取决于 Block 的定义方式)。例如: - threadIdx.x:线程在 Block 的 x 方向上的索引。 - threadIdx.y:线程在 Block 的 y 方向上的索引(2D Block 时使用)。 - threadIdx.z:线程在 Block 的 z 方向上的索引(3D Block 时使用)。
2.blockDim.x, blockDim.y, blockDim.z
表示 Block 的维度(即每个 Block 有多少个线程)。blockDim.x 表示 Block 在 x 方向的线程数。例如: - blockDim.x = 256 表示 Block 在 x 方向有 256 个线程。
每个block最多有1024个thread
3.blockIdx.x, blockIdx.y, blockIdx.z
表示当前 Block 在整个 Grid 中的 索引(0 开始)。例如: - blockIdx.x = 0 表示第一个 Block。 - blockIdx.x = 1 表示第二个 Block,依此类推。
同样前文代码中,add_func(a_gpu, b_gpu, c_gpu, block=(block_size, 1, 1), grid=(grid_size, 1, 1))函数在传入前三个参数后,还额外传入了block和grid的位置,并且block_size和grid_size还根据设备信息做了大小计算,目的是防止越界;而add_kernel(a_gpu, b_gpu, c_gpu)函数则不需要。这也正好体现了SourceModule需要手动管理block和grid的位置,而ElementwiseKernel则是自动管理的。
由此可知,越到底层,开销越低,速度越快,管理越复杂和精细化。
3.2 线程同步和线程通信进一步提速
在编写算法时,如果把计算放在单个block内完成,可以使用block内的线程同步和线程通信机制即共享内存,来进一步给算法提速。
同样还是通过案例来学习这些概念,有个非常贴切的算法正好贴合“网格(Grid)—块(Block)—线程(Thread)”三层计算网格概念的学习,那就是康威生命游戏算法(conway live game)。
3.2.1 康威生命游戏算法案例学习网格计算模型
首先介绍康威生命游戏的概念:https://lg.dtsci.cn
康威生命游戏(Conway's Game of Life),又称康威生命棋,是英国数学家约翰·何顿·康威在1970年发明的细胞自动机。
游戏规则:生命游戏中,对于任意细胞,规则如下:
- 每个细胞有两种状态 - 存活或死亡,每个细胞与以自身为中心的周围八格细胞产生互动(彩色为存活,灰色为死亡)
- 当前细胞为存活状态时,当周围的存活细胞低于2个时(不包含2个),该细胞变成死亡状态。(模拟生命数量稀少)
- 当前细胞为存活状态时,当周围有2个或3个存活细胞时,该细胞保持原样
- 当前细胞为存活状态时,当周围有超过3个存活细胞时,该细胞变成死亡状态。(模拟生命数量过多)
- 当前细胞为死亡状态时,当周围有3个存活细胞时,该细胞变成存活状态。(模拟繁殖)
这种模型是图灵完备的,也就是说,理论上生命游戏的规则可以实现计算机能够实现的全部功能。例如,可以在生命游戏中模拟运行另外一个生命游戏。
可以从书中获得案例代码,让deepseek进行详细的注释讲解:
- 导入模块
import pycuda.autoinit # 自动初始化CUDA环境
import pycuda.driver as drv # CUDA驱动接口
from pycuda import gpuarray # GPU数组操作
from pycuda.compiler import SourceModule # CUDA内核编译
import numpy as np # 数值计算
import matplotlib.pyplot as plt # 绘图
import matplotlib.animation as animation # 动画接下来是CUDA C编写的核心计算逻辑:
- 宏定义计算当前线程处理的全局x,y坐标。
#define _X ( threadIdx.x + blockIdx.x * blockDim.x )
#define _Y ( threadIdx.y + blockIdx.y * blockDim.y )_X和_Y坐标是如何计算出来的?blockIdx.x表示当前Block在整个Grid中的索引(0开始),blockDim.x表示Block的维度(即每个Block有多少个线程),二者相乘即确定当前block的第0个线程的坐标线程初始值,加上threadIdx.x偏移即可唯一确定X轴的threadIdx坐标;Y轴同理。
为什么不在单个block内运行线程?因为单个block内最多只有1024个线程,也就是最大32*32的网格,这样的网格太小了。
- 计算整个网格的宽度和高度。
#define _WIDTH ( blockDim.x * gridDim.x )
#define _HEIGHT ( blockDim.y * gridDim.y )- 实现环形边界条件(toroidal边界),超出边界的坐标会绕到另一侧。
#define _XM(x) ( (x + _WIDTH) % _WIDTH )
#define _YM(y) ( (y + _HEIGHT) % _HEIGHT )- 将2D坐标转换为1D数组索引。
#define _INDEX(x,y) ( _XM(x) + _YM(y) * _WIDTH )- 邻居计数函数,用来计算一个细胞周围8个邻居中存活细胞的数量。
__device__ int nbrs(int x, int y, int * in)
{return ( in[ _INDEX(x -1, y+1) ] + in[ _INDEX(x-1, y) ] + in[ _INDEX(x-1, y-1) ] \+ in[ _INDEX(x, y+1)] + in[_INDEX(x, y - 1)] \+ in[ _INDEX(x+1, y+1) ] + in[ _INDEX(x+1, y) ] + in[ _INDEX(x+1, y-1) ] );
}该函数为设备函数,是一个用C语言编写的以串行方式运行的函数,可以被内核函数中的单个线程调用,也就是说该函数会被多个线程同时并行调用。
- 主内核函数,用来实现生命游戏的规则,即存活细胞:只有2或3个邻居时存活,否则死亡;死亡细胞:恰好3个邻居时复活
__global__ void conway_ker(int * lattice_out, int * lattice)
{int x = _X, y = _Y;int n = nbrs(x, y, lattice);if ( lattice[_INDEX(x,y)] == 1)switch(n){case 2:case 3: lattice_out[_INDEX(x,y)] = 1; break;default: lattice_out[_INDEX(x,y)] = 0; }else if( lattice[_INDEX(x,y)] == 0 )switch(n){case 3: lattice_out[_INDEX(x,y)] = 1; break;default: lattice_out[_INDEX(x,y)] = 0; }
}最后是python主程序部分:
- 内核函数获取
conway_ker = ker.get_function("conway_ker")- 调用CUDA内核计算下一代存活状态,更新图像数据,将新状态复制到当前状态
def update_gpu(frameNum, img, newLattice_gpu, lattice_gpu, N):conway_ker(newLattice_gpu, lattice_gpu, grid=(N//32, N//32, 1), block=(32, 32, 1))img.set_data(newLattice_gpu.get())lattice_gpu[:] = newLattice_gpu[:]return img- 最后是主程序
if __name__ == '__main__':N = 128 # 网格大小# 初始化随机网格(25%存活)lattice = np.int32(np.random.choice([1,0], N*N, p=[0.25, 0.75]).reshape(N, N))lattice_gpu = gpuarray.to_gpu(lattice) # 上传到GPUnewLattice_gpu = gpuarray.empty_like(lattice_gpu) # 输出缓冲区# 设置动画fig, ax = plt.subplots()img = ax.imshow(lattice_gpu.get(), interpolation='nearest')ani = animation.FuncAnimation(fig, # 绘图画布update_gpu, # 更新函数fargs=(img, newLattice_gpu, lattice_gpu, N), # 传给更新函数的额外参数interval=0, # 帧间隔时间(ms)frames=1000, # 总帧数save_count=1000 # 动画缓存帧数)plt.show()- 关键点总结: 1.GPU并行化:每个CUDA线程处理一个细胞的状态计算 2.环形边界:通过模运算实现无限扩展的网格 3.双缓冲技术:使用两个数组避免读写冲突 4.高效内存访问:使用宏定义优化坐标计算 5.可视化:通过matplotlib实时显示演化过程
这种实现方式充分利用了GPU的并行计算能力,可以高效处理大规模的生命游戏模拟。
在正式运行之前可能需要安装一下图形库:
$ sudo apt-get install python3-tk最终运行效果与网页类似:
~/Desktop/EXAMPLES$ ./bin/python 03/conway_gpu.py
3.2.2 线程同步函数__syncthreads
上一节的代码中中,
conway_ker = ker.get_function("conway_ker")
def update_gpu(frameNum, img, newLattice_gpu, lattice_gpu, N): conway_ker(newLattice_gpu, lattice_gpu, grid=(N//32, N//32, 1), block=(32, 32, 1))每一次刷新帧均由Python程序发起,迭代一千次,发起一次,单元网格迭代一次,不会有线程同步的问题。
ani = animation.FuncAnimation(fig, # 绘图画布update_gpu, # 更新函数fargs=(img, newLattice_gpu, lattice_gpu, N), # 传给更新函数的额外参数interval=0, # 帧间隔时间(ms)frames=1000, # 总帧数save_count=1000 # 动画缓存帧数)如果迭代是在纯GPU上进行,即每个线程单独迭代一千次,则会出现快慢的问题;如果是写的for循环i参数来迭代的话,还会引起条件竞争的问题,即多个线程读写一个i的地址,造成线程状态不可知的问题。
这时候就需要线程同步函数syncthreads,该函数的功能是使线程块内的所有线程在执行到syncthreads函数时都会暂停,等待同一线程块中的所有线程执行到同一调用,线程才会继续执行后面的代码。__syncthreads函数的作用范围是同一线程块block内,而不是grid网格里的所有block。
那接下来更新代码,上一节N=128,grid=(N//32, N//32, 1)即grid=(4, 4, 1),有16个block;这次__syncthreads作用域仅在单个block内,那么grid只能是(1,1,1)。
# 执行内核,1个网格块,32x32线程块,1000万次迭代conway_ker(lattice_gpu, np.int32(10000000), grid=(1,1,1), block=(32,32,1))主内核函数:
__global__ void conway_ker(int * lattice, int iters)
{int x = _X, y = _Y; for (int i = 0; i < iters; i++){int n = nbrs(x, y, lattice); int cell_value; if ( lattice[_INDEX(x,y)] == 1)switch(n){case 2:case 3: cell_value = 1;break;default: cell_value = 0; }else if( lattice[_INDEX(x,y)] == 0 )switch(n){case 3: cell_value = 1;break;default: cell_value = 0; } __syncthreads();lattice[_INDEX(x,y)] = cell_value;__syncthreads(); }
}- 每个线程处理一个细胞
- 迭代iters次,每次迭代: 1.计算当前细胞的存活邻居数 2.根据游戏规则决定细胞下一状态:活细胞:2或3个邻居时存活,否则死亡;死细胞:恰好3个邻居时复活 3.使用__syncthreads()同步线程 4.更新细胞状态
运行即可得到迭代1000万次后的结果,由于初始状态是随机的,所以结束状态也是每次运行各不相同,类似如下:
可以看到网格小了许多,线程只有32x32个。前文的图是128x128个。
3.2.3 线程块内部共享内存加速
上一节的代码中,内核函数中的线程使用的数组位于GPU的全局内存中。可以进一步使用线程块内部的共享内存,进一步提高运行速度。
该共享内存的作用域在block之内,所以不能被其他block所访问。想要被其他block访问的话,得先复制到GPU全局内存中才可以。以下为详细案例:
__global__ void conway_ker_shared(int * p_lattice, int iters)
{// x, y are the appropriate values for the cell covered by this threadint x = _X, y = _Y;//声明使用共享内存的数组lattice__shared__ int lattice[32*32];//将外部gpuarray复制到GPU全局内存的数组拷贝到block内的共享内存lattice[_INDEX(x,y)] = p_lattice[_INDEX(x,y)];__syncthreads();for (int i = 0; i < iters; i++){// Count the number of neighbors around the current cell//以下均为使用共享内存进行运算int n = nbrs(x, y, lattice); int cell_value; // If the current cell is alive, determine if it lives or diesif (lattice[_INDEX(x,y)] == 1)switch(n){case 2:case 3: cell_value = 1;break;default: cell_value = 0; }else if (lattice[_INDEX(x,y)] == 0)switch(n){case 3: cell_value = 1;break;default: cell_value = 0; } __syncthreads();lattice[_INDEX(x,y)] = cell_value;__syncthreads();} __syncthreads();//将计算结果拷贝回GPU全局内存,方便后续gpuarray取出回电脑主机p_lattice[_INDEX(x,y)] = lattice[_INDEX(x,y)];__syncthreads();
}
""")运行起来的效果与上一节类似,运行速度有显著提升:
3.3 并发CUDA流提升GPU利用效率
前面我们写代码实现了一个康威生命游戏的实例,网格里闪烁的生命非常耀眼。如果我要实现2个实例、4个、8个、16个甚至无限个实例呢?GPU是吞吐机,但凡用到GPU的场景,都会倾向于更高的并发。并发越多,其相对于CPU的优势就越大,利用效率就越高。
实现多个康威生命游戏的实例,每一个实例可以叫做一个CUDA流。CUDA流(Stream)是CUDA编程中用于管理并发执行任务的重要概念,它允许在GPU上并行组织多个操作(如内核执行、内存传输等)。
在CUDA流的基础上,就有了事件(Events)、上下文(Context)、同步(Synchronization)等等概念,接下来在案例中学习。
3.3.1 并发CUDA流提升四倍效率
先看代码multi-kernel.py:
- 定义 CUDA 内核函数:
ker = SourceModule("""
__global__ void mult_ker(float * array, int array_len)
{int thd = blockIdx.x*blockDim.x + threadIdx.x;int num_iters = array_len / blockDim.x;for(int j=0; j < num_iters; j++){int i = j * blockDim.x + thd;for(int k = 0; k < 50; k++){array[i] *= 2.0;array[i] /= 2.0;}}
}
""")1.global 表示这是一个 CUDA 内核函数,可以从主机调用在设备上执行 2.函数参数:float * array (数组指针) 和 int array_len (数组长度) 3.thd 计算当前线程的全局索引 4.num_iters 计算每个线程需要处理的元素数量 5.内部循环执行 50 次乘 2.0 和除 2.0 操作(实际上不改变数值,仅用于模拟计算负载,不会有上下结果依赖,完全可以并发执行)
- 准备测试数据
num_arrays = 200 # 数组数量
array_len = 1024**2 # 每个数组长度 (1M 元素)data = []
data_gpu = []
gpu_out = []# 生成随机数组
for _ in range(num_arrays):data.append(np.random.randn(array_len).astype('float32'))- 执行计算并计时
t_start = time()# 将数组复制到 GPU
for k in range(num_arrays):data_gpu.append(gpuarray.to_gpu(data[k]))# 处理数组 (调用内核函数)
for k in range(num_arrays):mult_ker(data_gpu[k], np.int32(array_len), block=(64,1,1), grid=(1,1,1))# 将结果从 GPU 复制回主机
for k in range(num_arrays):gpu_out.append(data_gpu[k].get())t_end = time()
block=(64,1,1) 定义线程块大小为 64 个线程
grid=(1,1,1) 定义网格大小为 1 个线程块- 验证结果并输出时间
# 验证结果是否正确 (应与原始数据相同)
for k in range(num_arrays):assert (np.allclose(gpu_out[k], data[k]))print('Total time: %f' % (t_end - t_start))运行一下可以得到耗时:
~/Desktop/EXAMPLES$ ./bin/python 03/multi-kernel.py
Total time: 1.933080那现在引入CUDA流且引入流的并行运行的概念,创建多个CUDA流(Stream),每个数组对应一个独立的流。
streams = []
for _ in range(num_arrays):streams.append(drv.Stream())使用to_gpu_async替代to_gpu实现异步数据传输,指定了对应的流,数据传输可以在该流中异步执行:
#原始同步版本
data_gpu.append(gpuarray.to_gpu(data[k]))
#优化后的异步版本
data_gpu.append(gpuarray.to_gpu_async(data[k], stream=streams[k]))异步内核执行,内核调用时指定了对应的流,使内核执行可以异步进行:
# 原始同步版本
mult_ker(data_gpu[k], np.int32(array_len), block=(64,1,1), grid=(1,1,1))
# 优化后的异步版本
mult_ker(data_gpu[k], np.int32(array_len), block=(64,1,1), grid=(1,1,1), stream=streams[k])异步数据回传,使用 get_async 替代 get 实现异步数据回传:
# 原始同步版本
gpu_out.append(data_gpu[k].get())
# 优化后的异步版本
gpu_out.append(data_gpu[k].get_async(stream=streams[k]))这些优化带来了以下性能改进:
- 数据传输与计算重叠:不同流中的数据传输和内核执行可以并行进行;当GPU正在处理一个流中的计算时,可以同时进行另一个流的数据传输
- 减少CPU等待时间:异步操作允许CPU在发起GPU操作后继续执行,而不是等待每个操作完成
- 更好的GPU利用率:多个流中的操作可以更充分地利用GPU的计算和内存带宽资源
运行优化后的脚本multi-kernel_streams.py:
$ ./bin/python 03/multi-kernel_streams.py
Total time: 0.431015可见速度优化至原来的四分之一。
3.3.2 CUDA流并发运行康威生命游戏
这一节我们用CUDA流来并发运行四个康威生命游戏。
创建4条CUDA流放进数组里,每个流相当于一个独立的任务队列,可并行异步重叠执行计算和内存操操作:
num_concurrent = 4
streams = []
for k in range(num_concurrent):streams.append(drv.Stream()) # 创建独立CUDA流不同流的kernel也可以并发执行:
conway_ker(newLattices_gpu[k], lattices_gpu[k], grid=(N//32, N//32, 1), block=(32, 32, 1), stream=streams[k]) # 显式指定执行的流异步数据下载,异步的get_async()替代同步的get(),把异步下载操作绑定到到特定流,不阻塞其他流:
imgs[k].set_data(newLattices_gpu[k].get_async(stream=streams[k]))异步数据更新,显卡内内存复制也实现异步化:
lattices_gpu[k].set_async(newLattices_gpu[k], stream=streams[k])数据结构重构,每个实例拥有独立内存空间,避免并发访问冲突:
lattices_gpu = [] # 改为列表存储多个GPU数组
for k in range(num_concurrent):lattices_gpu.append(gpuarray.to_gpu(lattice))可视化并行,多子图同时渲染不同模拟状态,各子图更新互不阻塞:
fig, ax = plt.subplots(nrows=1, ncols=num_concurrent)
for k in range(num_concurrent):imgs.append(ax[k].imshow(..., interpolation='nearest'))实际运行conway_gpu_streams.py下来,可以得到这样的效果:
可以尝试把num_concurrent = 4改成8、16、20、22、100、200等等数字,然后运行后,用watch -d -n 1 nvidia-smi查看负载,可以看到负载并没有显著提升,可见代码优化得效率很高。
3.3.3 事件Event精准测量CUDA流步骤耗时
前文学习Python函数测量耗时用的cProfile模块,现在CUDA内核执行在GPU上,测速肯定得用GPU上的函数才能测量准确,这个机制就是Event事件机制。
还是直接用案例simple_event_example.py来学习,速度最快。这段代码演示了如何使用PyCUDA在GPU上执行并行计算,并测量内核执行时间。
- CUDA内核定义,这部分是CUDA内核代码,使用C语言语法编写: 1.global 表示这是一个可以在GPU上执行的核函数 2.函数接收一个浮点数组指针和数组长度 3.thd 计算当前线程的全局索引 4.num_iters 计算每个线程需要处理的元素数量 5.外层循环让每个线程处理多个数组元素 6.内层循环对每个元素执行50次乘2和除2操作(这实际上是一个空操作,等于啥也没干,仅用于增加计算量,增加显卡负载)
ker = SourceModule("""
__global__ void mult_ker(float * array, int array_len)
{int thd = blockIdx.x*blockDim.x + threadIdx.x;int num_iters = array_len / blockDim.x;for(int j=0; j < num_iters; j++){int i = j * blockDim.x + thd;for(int k = 0; k < 50; k++){array[i] *= 2.0;array[i] /= 2.0;}}
}
""")- 获取内核函数引用,从编译后的模块中获取名为'mult_ker'的内核函数引用
mult_ker = ker.get_function('mult_ker')- 准备数据
array_len = 100*1024**2 # 数组长度:100MB (100×1024×1024个float32元素)data = np.random.randn(array_len).astype('float32') # 生成随机数据
data_gpu = gpuarray.to_gpu(data) # 将数据传输到GPU- 创建CUDA事件用于计时
#CUDA事件用于精确测量GPU上的操作时间
start_event = drv.Event()
end_event = drv.Event()- 执行内核并记录时间
start_event.record() # 记录开始时间点
mult_ker(data_gpu, np.int32(array_len), block=(64,1,1), grid=(1,1,1))
end_event.record() # 记录结束时间点- 同步和输出结果
end_event.synchronize() # 等待事件完成
# 查询事件状态
print('Has the kernel started yet? {}'.format(start_event.query()))
print('Has the kernel ended yet? {}'.format(end_event.query()))
# 计算并打印执行时间(毫秒)
print('Kernel execution time in milliseconds: %f' % start_event.time_till(end_event))最终执行下来耗时七百多毫秒:
~/Desktop/EXAMPLES$ ./bin/python 03/simple_event_example.py
Has the kernel started yet? True
Has the kernel ended yet? True
Kernel execution time in milliseconds: 749.370728这里源码中只有一个默认的CUDA流,如果是多个CUDA流该如何计时呢?接下来把代码修改一下,主要改进点:
- 多数组并行处理:从处理1个大数组改为处理200个小数组
- 流异步操作:使用多个CUDA流实现数据传输和计算的并行
- 更全面的性能统计:计算平均内核时间和标准差
首先是参数设置,将单个大数组(100MB)改为200个小数组(每个1MB),这样可以利用流并行处理多个小数组:
num_arrays = 200 # 数组数量增加到200个
array_len = 1024**2 # 每个数组长度减小到1MB (1024×1024个float32元素)接下来初始化数据结构,为每个数组创建独立的流和事件,实现并行处理:
data = [] # 存储CPU端的原始数据
data_gpu = [] # 存储GPU端的数据
gpu_out = [] # 存储从GPU传回的结果
streams = [] # CUDA流数组
start_events = [] # 开始事件数组
end_events = [] # 结束事件数组# 为每个数组创建独立的流和事件
for _ in range(num_arrays):streams.append(drv.Stream())start_events.append(drv.Event())end_events.append(drv.Event())数据生成,生成200个随机数组,每个大小1MB:
# 生成随机数组
for _ in range(num_arrays):data.append(np.random.randn(array_len).astype('float32'))然后到了最为关键的异步数据传输和计算部分: - 用to_gpu_async 和 get_async 替代了同步传输 - 每个数组使用独立的流(streams[k]) - 数据传输和计算重叠并行进行
t_start = time()# 异步传输数据到GPU (使用不同流)
for k in range(num_arrays):data_gpu.append(gpuarray.to_gpu_async(data[k], stream=streams[k]))# 异步执行内核 (使用不同流)
for k in range(num_arrays):start_events[k].record(streams[k])mult_ker(data_gpu[k], np.int32(array_len), block=(64,1,1), grid=(1,1,1), stream=streams[k])
for k in range(num_arrays):end_events[k].record(streams[k])# 异步从GPU传回数据 (使用不同流)
for k in range(num_arrays):gpu_out.append(data_gpu[k].get_async(stream=streams[k]))t_end = time()结果验证和性能统计:
# 验证结果正确性
for k in range(num_arrays):assert (np.allclose(gpu_out[k], data[k]))# 计算每个内核的执行时间
kernel_times = []
for k in range(num_arrays):kernel_times.append(start_events[k].time_till(end_events[k]))# 输出统计信息
print('Total time: %f' % (t_end - t_start))
print('Mean kernel duration (milliseconds): %f' % np.mean(kernel_times))
print('Mean kernel standard deviation (milliseconds): %f' % np.std(kernel_times))最终执行multi-kernel_events.py,执行速度减小到10毫秒,速度提升了大概七十倍。标准差也非常低,GPU内核运行时间分布很均匀。
~/Desktop/EXAMPLES$ ./bin/python 03/multi-kernel_events.py
Total time: 0.419365
Mean kernel duration (milliseconds): 10.324401
Mean kernel standard deviation (milliseconds): 3.0094103.3.4 CUDA流中的设备同步和上下文
这一节与性能提升无关了,主要讲几个状态和概念。
比如前文gpu_mandelbrot.py代码里的:
lattice_gpu = gpuarray.to_gpu(lattice)to_gpu同步拷贝到显卡,等效于先异步拷贝到显卡,再进行设备同步:
# copy complex lattice to the GPUmandelbrot_lattice_gpu = gpuarray.to_gpu_async(mandelbrot_lattice)# synchronize in current contextpycuda.autoinit.context.synchronize()在PyCUDA中,pycuda.autoinit.context.synchronize() 的作用是 同步主机(CPU)和设备(GPU)之间的操作,确保所有先前发出的CUDA操作(如内核启动、内存传输等)都已完成执行。
同理,执行和取回结果也可以改成异步操作+设备同步:
mandel_ker(mandelbrot_lattice_gpu, mandelbrot_graph_gpu, np.int32(max_iters), np.float32(upper_bound))
mandelbrot_graph = mandelbrot_graph_gpu.get()改成:
mandel_ker(mandelbrot_lattice_gpu, mandelbrot_graph_gpu, np.int32(max_iters), np.float32(upper_bound))
pycuda.autoinit.context.synchronize()
mandelbrot_graph = mandelbrot_graph_gpu.get_async()
pycuda.autoinit.context.synchronize()那么问题来了,为什么开辟分配内存不需要设备同步?
# allocate an empty array on the GPU
mandelbrot_graph_gpu = gpuarray.empty(shape=mandelbrot_lattice.shape, dtype=np.float32)因为CUDA中的内存分配操作总是同步的,调用即实施完成。
最终代码结果见gpu_mandelbrot_context_sync.py。
目前为止的所有代码都是用的import pycuda.autoinit自动管理上下文的,导入这个模块后,程序会在启动时自动创建一个上下文,运行时进行自动管理,并在结束时进行销毁。
但其实这个操作是可以手动执行的,给个简单的案例simple_context_create.py:
import numpy as np
from pycuda import gpuarray
import pycuda.driver as drv#初始化 CUDA 驱动
drv.init()
#指定GPU设备
dev = drv.Device(0)
#创建context上下文
ctx = dev.make_context()x = gpuarray.to_gpu(np.float32([1, 2, 3]))
print(x.get())
#销毁上下文
ctx.pop()销毁这一步非常重要,如果忘记销毁会引起内存泄漏。
3.3.5 主机上Python的异步机制
主机CPU也有一定的并发能力,Python可以使用multiprocessing模块进行多进程、使用threading模型进行多线程并发,主机CPU的并发能力相比GPU要逊色很多,毕竟高并发是GPU的核心优势。
这也是为什么神经网络、大模型要采用GPU进行计算的原因,后续我们再进行这方面的学习。
代码等附件下载地址:https://github.com/r0ysue/5060STUDY