开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例
本案例是ModbusTCP主站通过开疆智能ModbusTCP转Devicenet网关连接发那科机器人的配置案例,操作分为三个配置1:ModbusTCP主站配置2:ModbusTCP转Devicenet网关配置3:FANUC机器人配置,具体过程如下
配置过程
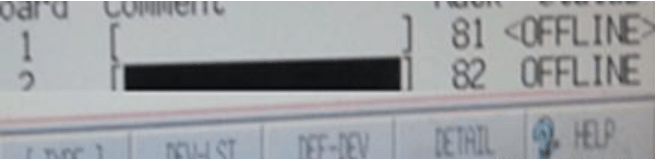
主菜单—IO—Devicenet—如图1
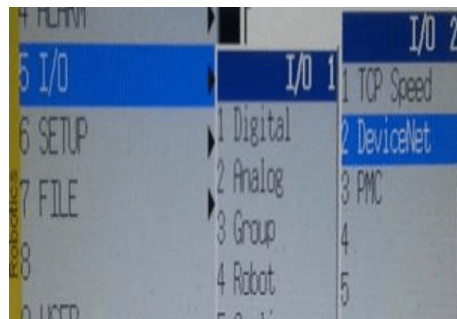
图1
进入81丛站选项第1项,先关掉通讯设置,OFFLINE,就停止报错。图 1-2
1-2
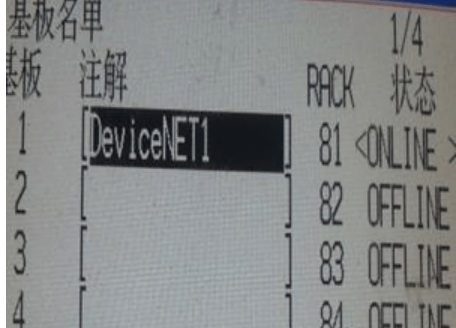
—按细节进入到图 1-3
1-3
MAC-ID=丛站号,机器人在PLC里面的第几个从站,基板自动启动设为ON, 4: 输入再继续状态设为零。
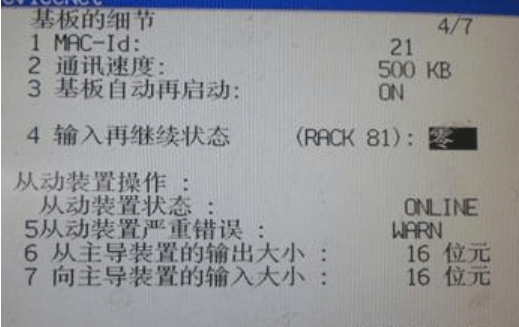
主菜单如图1-4—选82基板
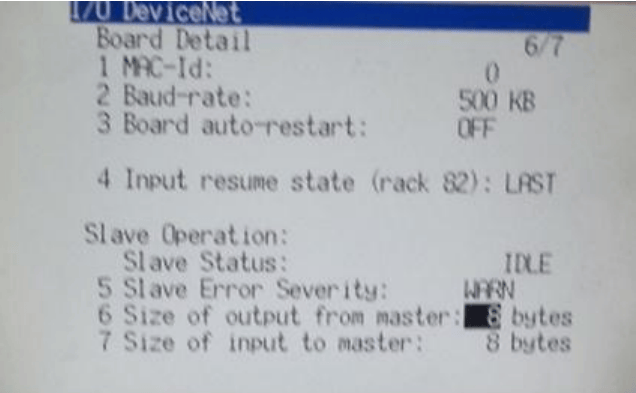
图G-1-1
把基板里面的短接换到MASTER里面来进入如图G-1-1—按F4细节(DETAIL)—进入到G1-1-2画面MAC-ID站号为0此为主站号所以可以不设, 第2项:通讯讯速度为500KB,3项:基板自动再启动为OFF。
4:输入再继续状态为零。
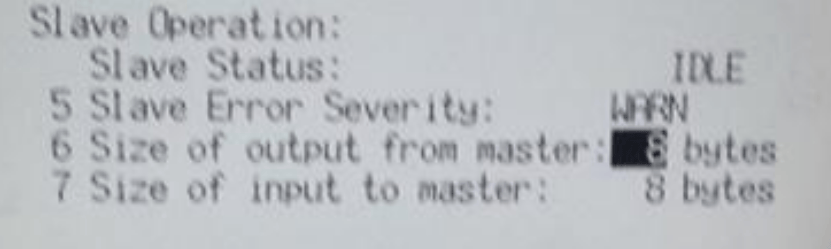
5:丛站装置严重错误:WARN
6:从主站输出为 8位
7:往主站输入为 8位
设好后退出到G-1-1画面,线路如果没问题的情况下是会ONLINE的。

H-1-1
H-1-2
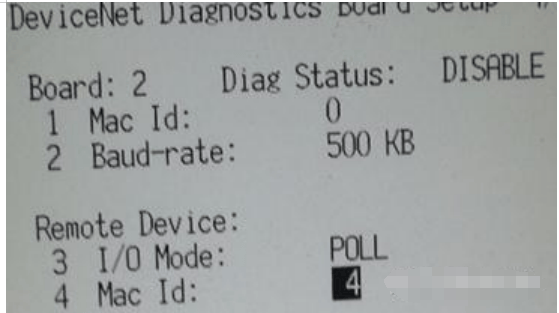
在G-1-1画面光标移至82基板上,老机器要先把81跟82全部OFF掉才能操作下一步,按翻页(NEXT)键,进入H-1-1画面—按F3键,诊断(DIAG)出现H-1-2画面1:主站MAC ID 站号为0。 2:Baud-rate:速度为500KB 。
3:I/O mode (IO方式)= POLL(点对点)
4:MAC ID 4 (站号)如是DI输入模块拔在第4个站,涂胶机是第1个站输出模块为第2个站,3、4为两个输入模块。
模块有个拔码,拔在哪就输入哪个站号去搜索
设好后按 右下的F4搜索,有些新机器人是不
需要在OFFLINE的状态下搜索的一般模块与
基板两端需要装中央电阻,如线路没问题是可
以搜索到的。也可以接个小模块用很短的线来
做试验收。搜索出来后得到如下画面下一页。
i-1-1
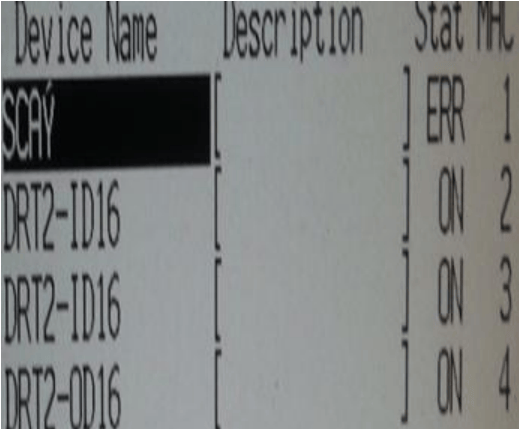
搜索出来的结果是,模块的型号位数都会显示出来,如 i - 1-1-按F3添加—F4应用,如果有多块板可以按以上步骤全部搜索出来。
退出到G-1-1画面光标移到82基板处—按DEV-LST-——进入可以看到搜索到的板,如图 i-1-2 先OFF掉再返到G-1-1画面打开81、82基板ONLIN后重新进入到DEV-LST(i-1-2)画面,再打开小丛站的ON。设置完成重新启动。
ModbusTCP转Devicenet网关配置过程
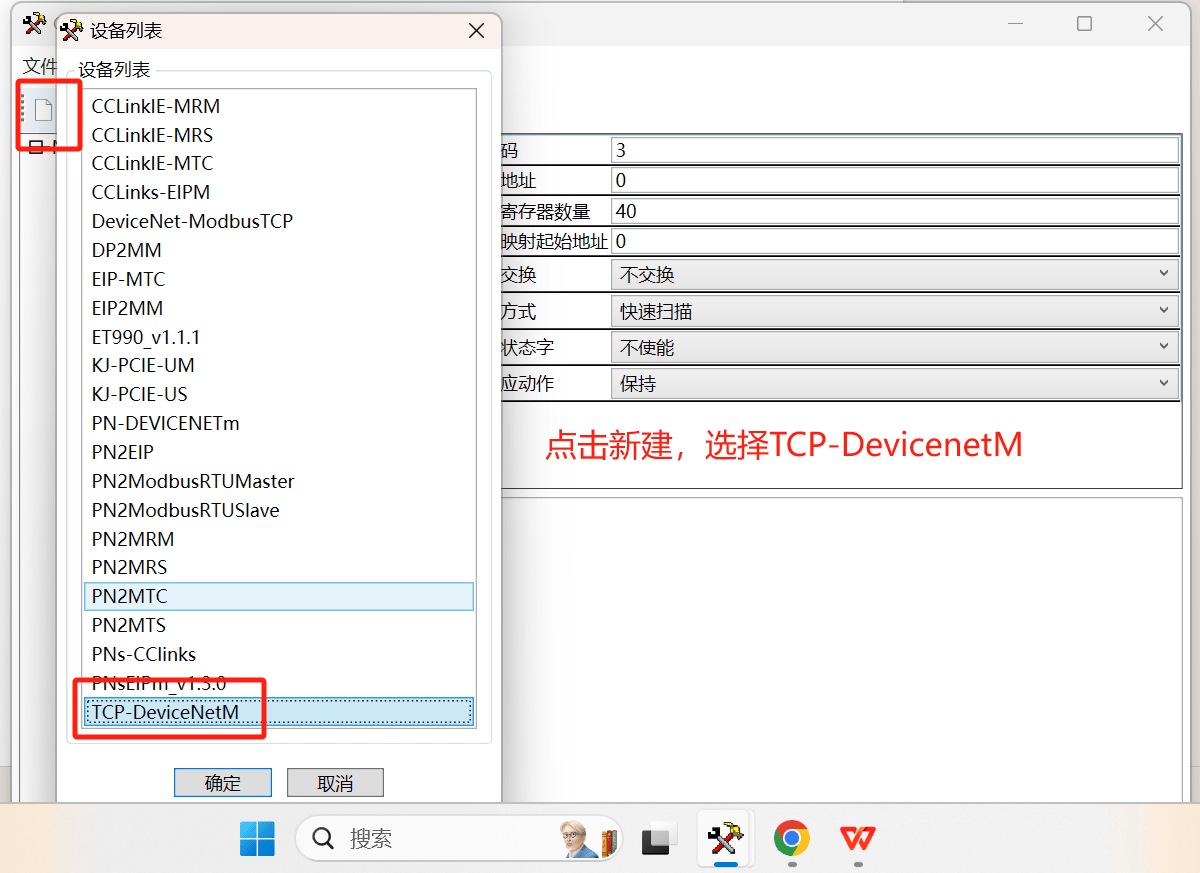
打开网关配置软件“Gateway Configuration Studio”新建项目选择TCP-DevicenetM
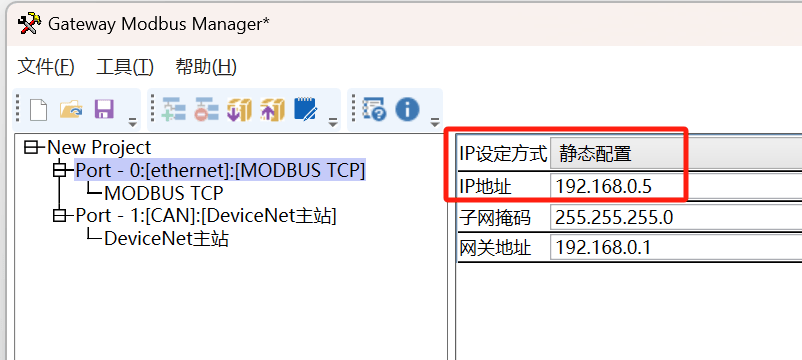
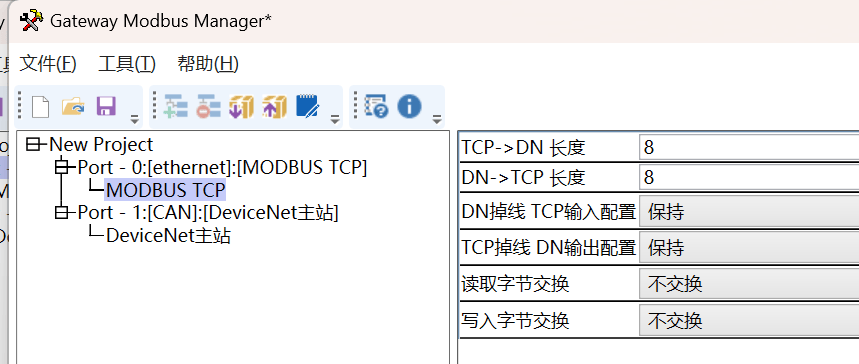
首先设置网关的ModbusTCP一侧的IP地址以及数据长度。并设置网关短线后的数据处理方式以及字节交换顺序
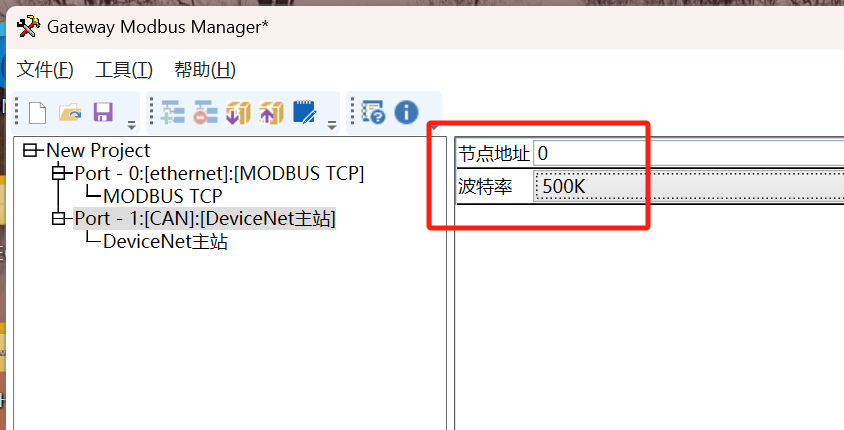
设置网关的Devicenet节点地址以及波特率,与机器人配置保持一致。
填写从站参数站地址,数据长度等和从站保持一致。

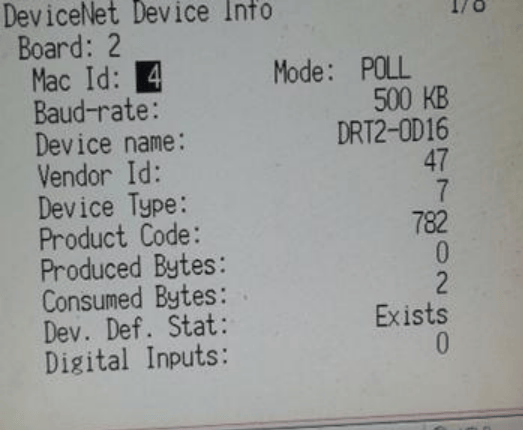
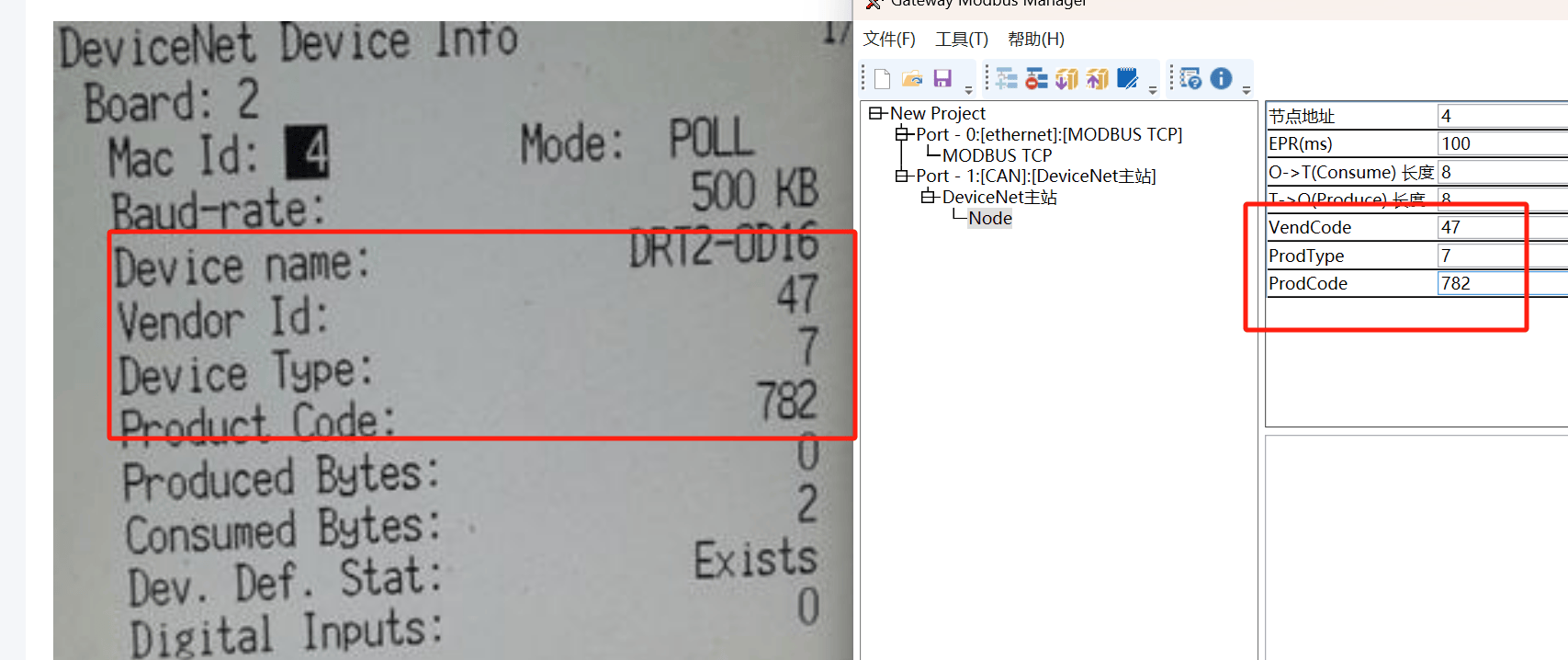
机器人地址设为4,所以网关同步保持一致
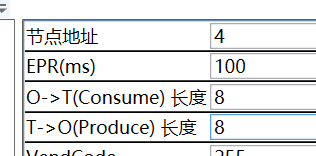
同样,字节数长度为8字节,同样保持一致
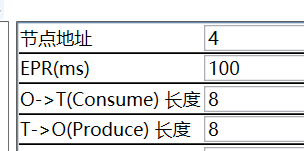
VendCode,ProdType及ProdCode三个参数参考前面图中提供的参数
到此,网关与机器人配置结束,配置完成下载后将ModbusTCP主站连接到网关的ModbusTCP口即可开始对机器人进行读写。