强化学习:策略梯度概念
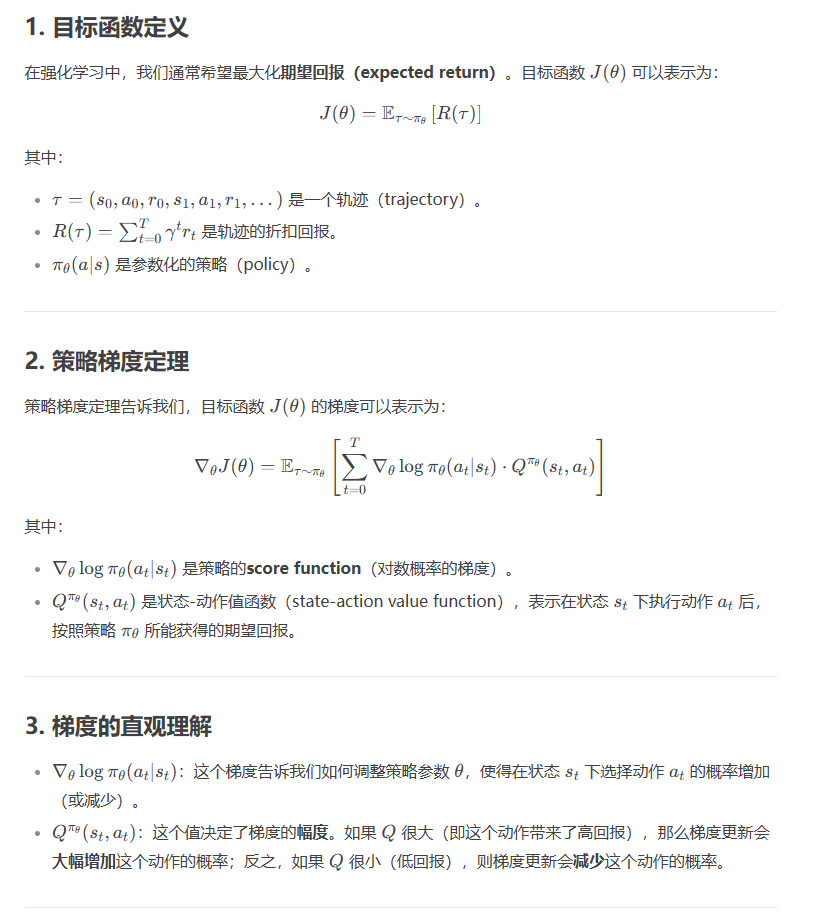
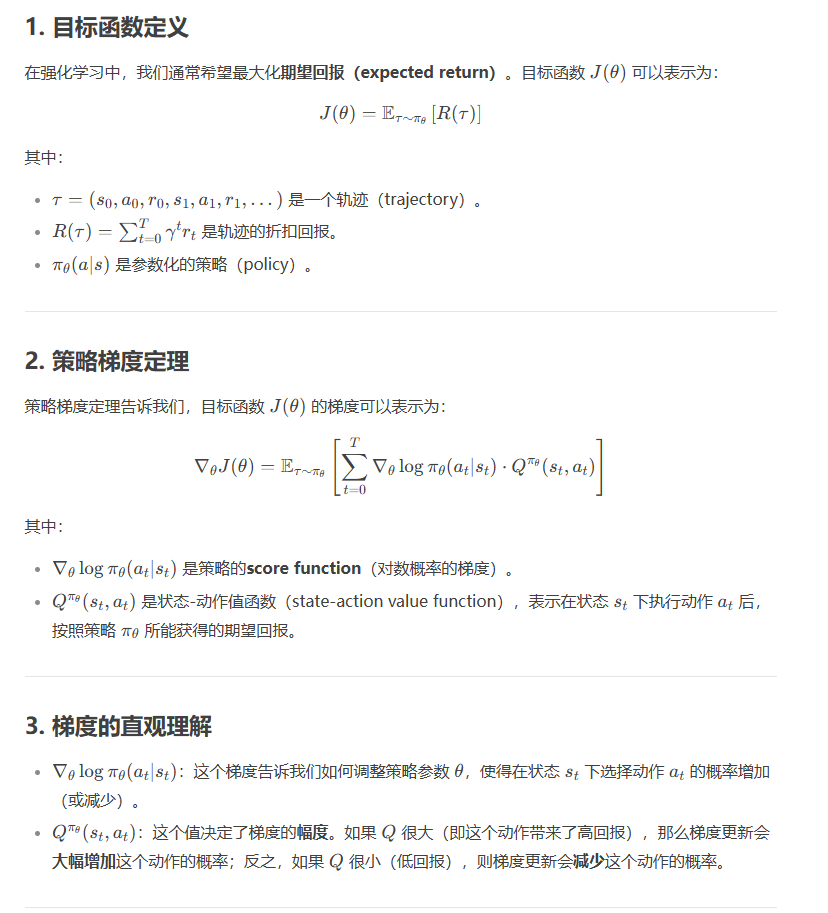
2.策略梯度方法
目标是使策略 不断更新,回报更高。
计算每一个轨迹的回报,和对应的概率
目标是使回报高的轨迹概率应该高。这样整个策略的期望回报也会高。
什么是策略期望回报?
就是用这个策略跑了若干个轨迹,得到回报,然后求平均
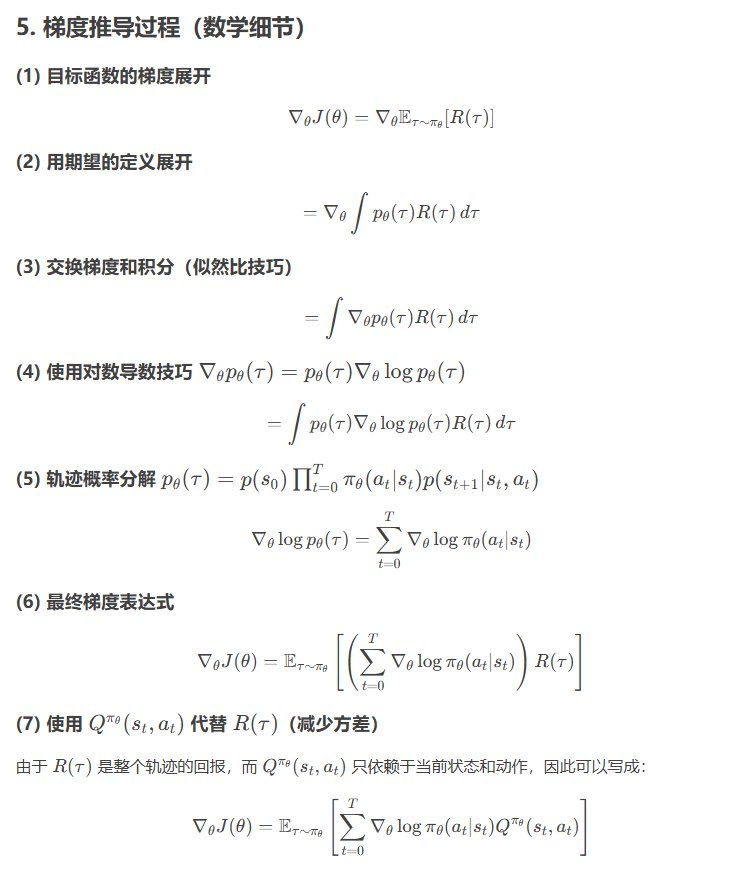
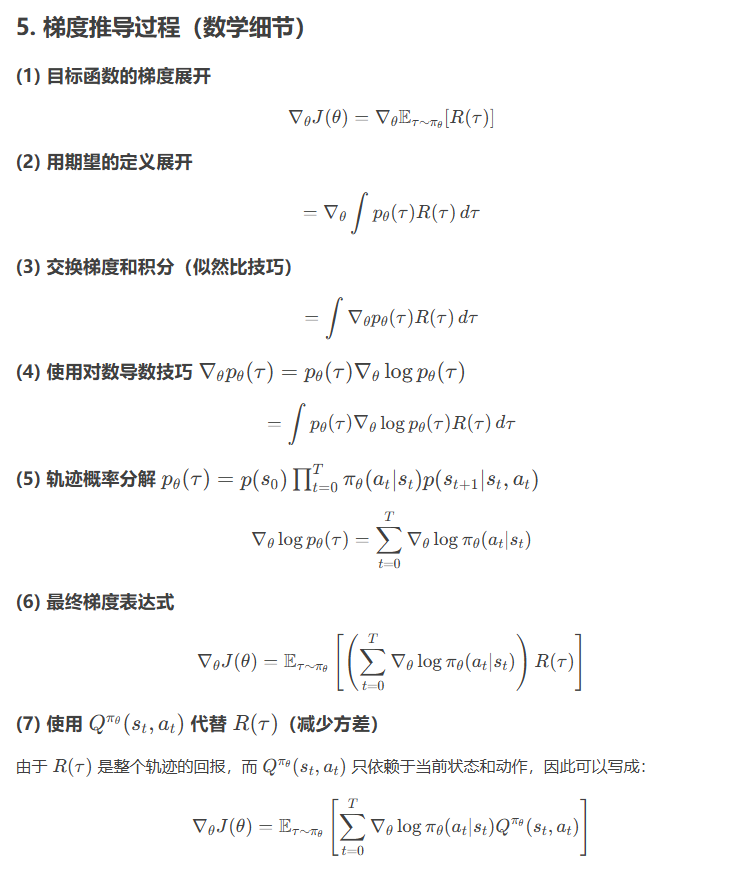
2.1 策略梯度的主要原理
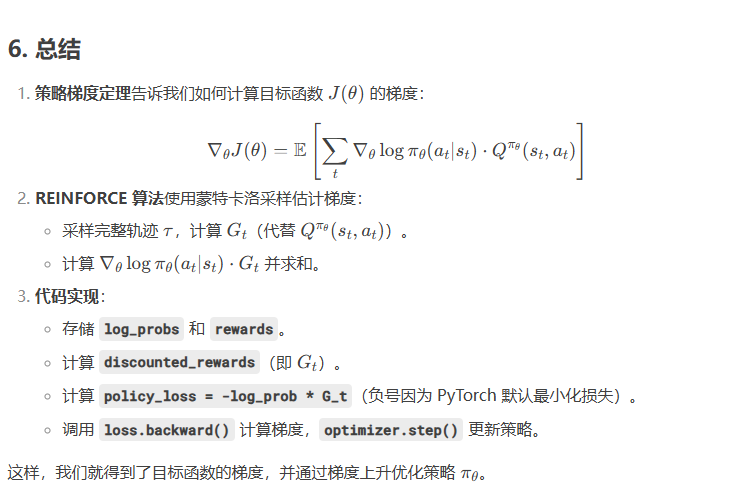
# 1. 采样一个完整的 episodelog_probs = [] # 存储每个 (s_t, a_t) 的 log π(a_t|s_t)rewards = [] # 存储每个时间步的奖励 r_twhile not done:action_probs = policy_net(state_tensor) # π(a|s)action = sample_action(action_probs) # a_t ~ π(a|s)log_prob = torch.log(action_probs[action]) # log π(a_t|s_t)log_probs.append(log_prob)next_state, reward, done = env.step(action)rewards.append(reward)# 2. 计算每个时间步的折扣回报 G_tdiscounted_rewards = compute_discounted_rewards(rewards, gamma=0.99)# 3. 计算策略梯度损失policy_loss = []for log_prob, G_t in zip(log_probs, discounted_rewards):policy_loss.append(-log_prob * G_t) # 负号因为 PyTorch 默认做梯度下降# 4. 反向传播total_loss = torch.stack(policy_loss).sum() # 求和所有时间步的损失optimizer.zero_grad()total_loss.backward() # 计算梯度 ∇θ J(θ)optimizer.step() # 更新 θ ← θ + α ∇θ J(θ)
2.2 Reinforce 算法,也称为蒙特卡洛策略梯度,是一种策略梯度算法,它使用来自整个 episode 的估计回报来更新策略参数
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as Fclass PolicyNetwork(nn.Module):"""策略网络,输入状态,输出动作概率"""def __init__(self, state_dim, action_dim, hidden_dim=64):super(PolicyNetwork, self).__init__()self.fc1 = nn.Linear(state_dim, hidden_dim)self.fc2 = nn.Linear(hidden_dim, action_dim)def forward(self, x):x = F.relu(self.fc1(x))x = F.softmax(self.fc2(x), dim=-1)return xdef reinforce(env, policy_net, optimizer, num_episodes=1000, gamma=0.99):"""REINFORCE算法实现参数:env: 环境policy_net: 策略网络optimizer: 优化器num_episodes: 训练episode数量gamma: 折扣因子返回:每个episode的奖励列表"""episode_rewards = []for episode in range(num_episodes):state = env.reset()log_probs = []rewards = []# 采样一个完整的episodedone = Falsewhile not done:# 将状态转换为tensorstate_tensor = torch.FloatTensor(state).unsqueeze(0) # shape: (1, state_dim)# 通过策略网络获取动作概率action_probs = policy_net(state_tensor) # shape: (1, action_dim)# 从概率分布中采样一个动作action = torch.multinomial(action_probs, 1).item()# 也可以# dist = torch.distributions.Categorical(action_probs)# action = dist.sample() # 标量值# 计算动作的log概率log_prob = torch.log(action_probs.squeeze(0)[action]) # shape: scalar# 执行动作next_state, reward, done, _ = env.step(action)# 存储log概率和奖励log_probs.append(log_prob)rewards.append(reward)# 更新状态state = next_state# 计算episode的折扣回报discounted_rewards = []R = 0for r in reversed(rewards):R = r + gamma * Rdiscounted_rewards.insert(0, R)# 标准化折扣回报(减少方差)discounted_rewards = torch.FloatTensor(discounted_rewards)discounted_rewards = (discounted_rewards - discounted_rewards.mean()) / (discounted_rewards.std() + 1e-9)# 计算策略梯度损失policy_loss = []for log_prob, R in zip(log_probs, discounted_rewards):policy_loss.append(-log_prob * R) # 负号因为我们要最大化回报# 反向传播optimizer.zero_grad()policy_loss = torch.stack(policy_loss).sum() # shape: scalarpolicy_loss.backward()optimizer.step()# 记录总奖励episode_rewards.append(sum(rewards))return episode_rewards
开始以为policy_loss 计算的是策略梯度,感觉很不合理,其实不是的,差了一个求导呢。
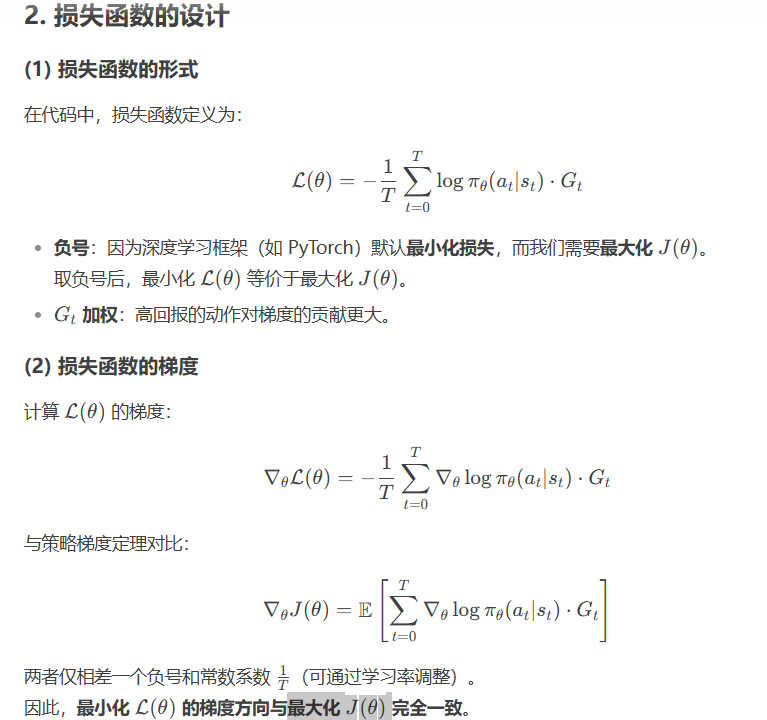
总结,policy_loss 的梯度 和 目标函数的梯度符号相反。
两者的梯度 符号相反。因此最大化目标函数等于最小化policy_loss