ubuntu20上 : mujoco210安装教程
参考原帖: ubuntu22.04安装mujoco210 mujoco-py超详细_mujoco210安装教程-CSDN博客
相关下载链接:
通过网盘分享的文件:mujoco相关
链接: https://pan.baidu.com/s/1psdORFp-PBZ-P11nA926MA?pwd=2r6b 提取码: 2r6b
1、先把安装包上传到虚拟机
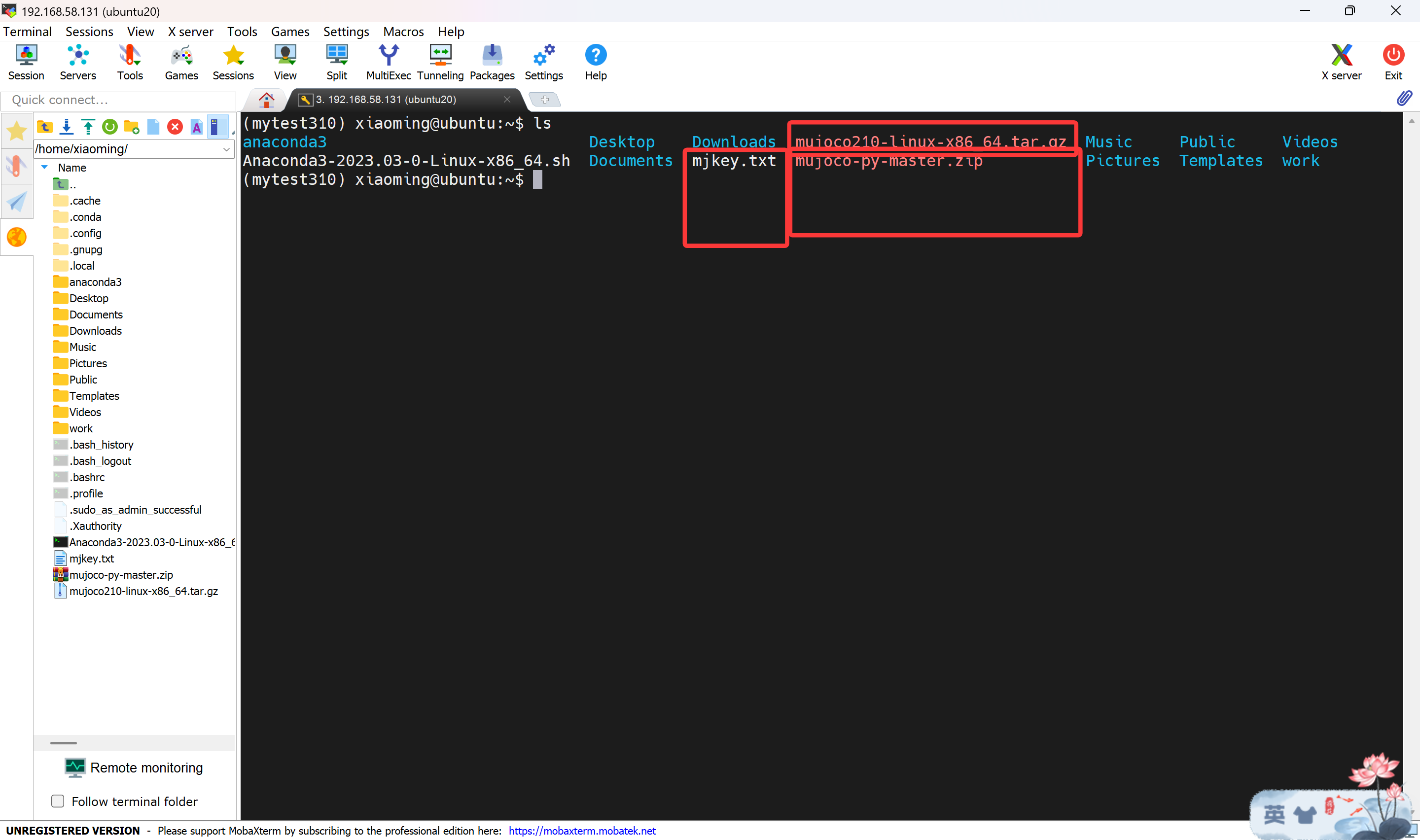
2、创建一个文件夹用于一会的解压操作。
mkdir ~/.mujoco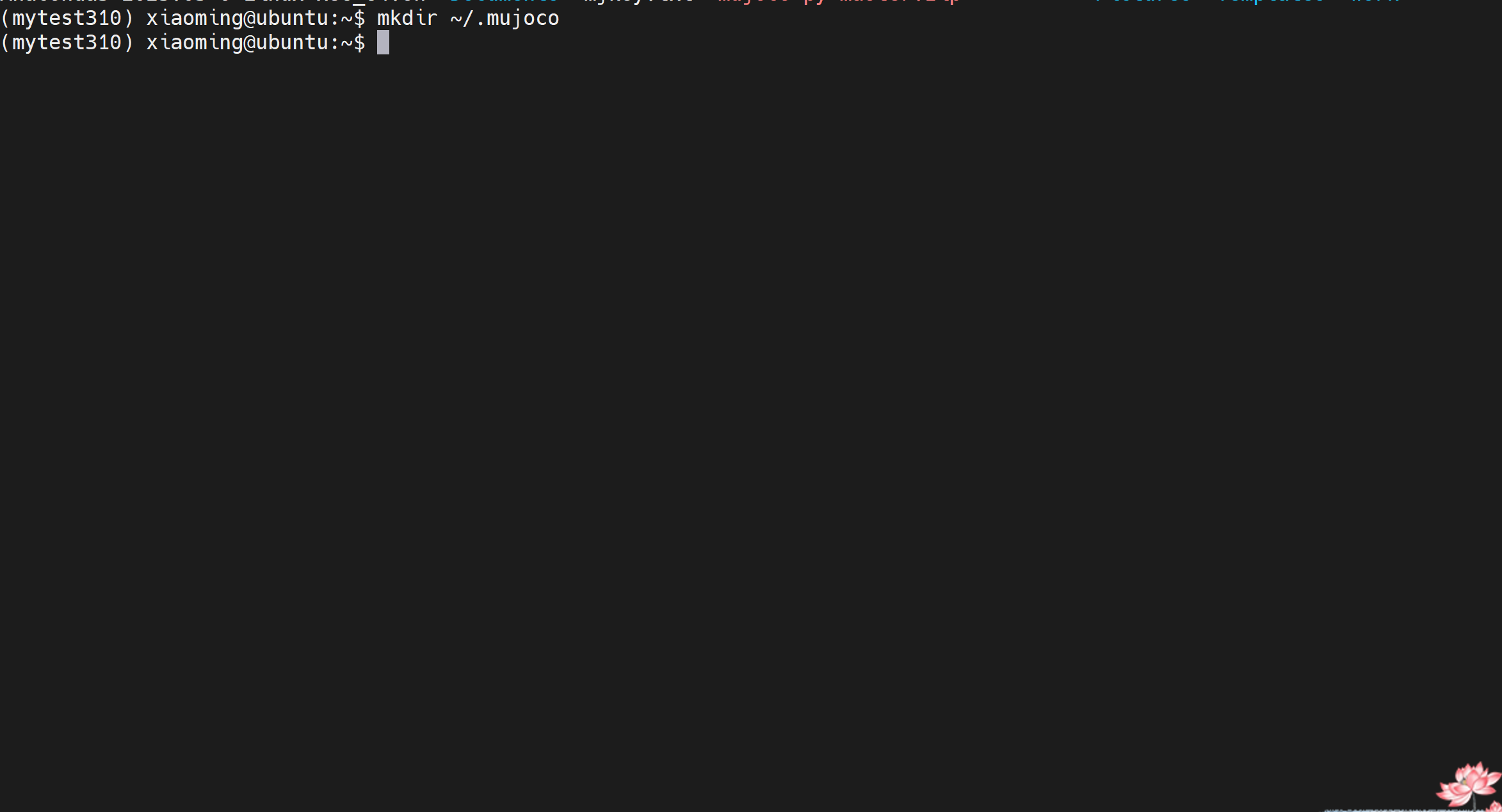
3、解压安装包到刚才创建的位置。
tar -zxvf mujoco210-linux-x86_64.tar.gz -C ~/.mujoco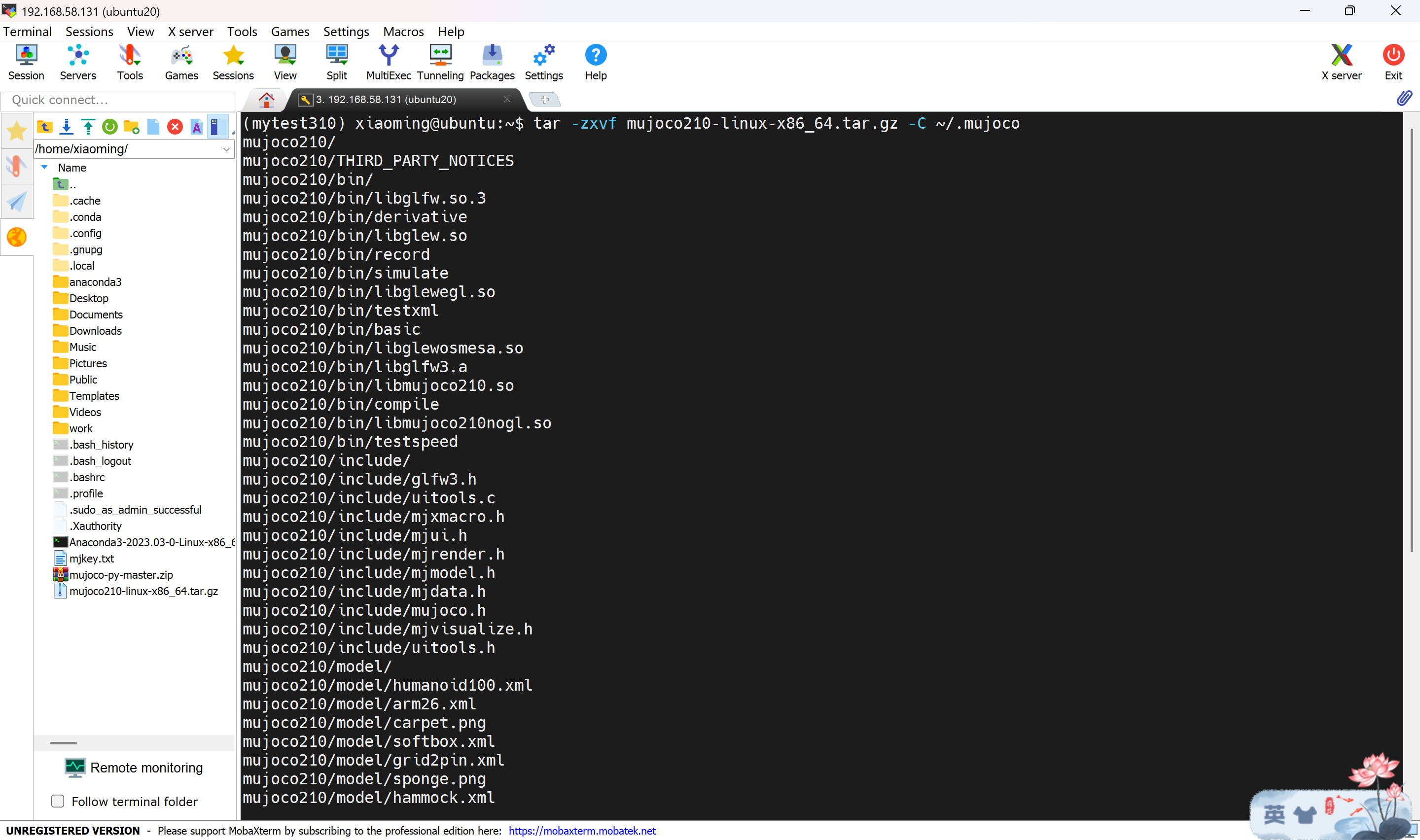
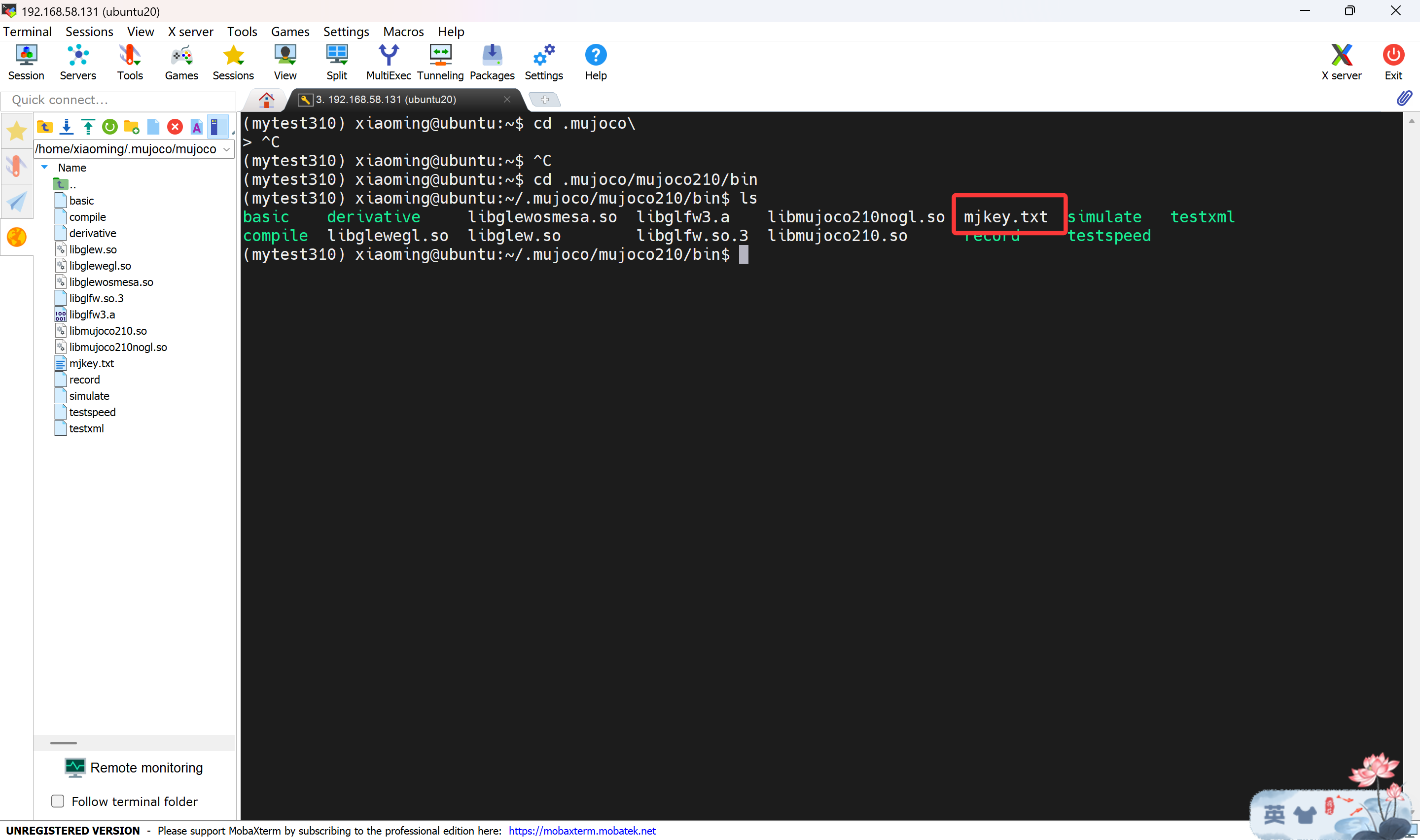
4、上传许可文件到/home/xiaoming/.mujoco/mujoco210/bin
5、编辑环境变量 sudo vim ~/.bashrc
export MUJOCO_KEY_PATH=~/.mujoco${MUJOCO_KEY_PATH}
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/xiaoming/.mujoco/mujoco210/bin6、刷新环境变量
source ~/.bashrc7、测试是否成功
cd ~/.mujoco/mujoco210/bin
./simulate ../model/humanoid.xml测试成功的输出
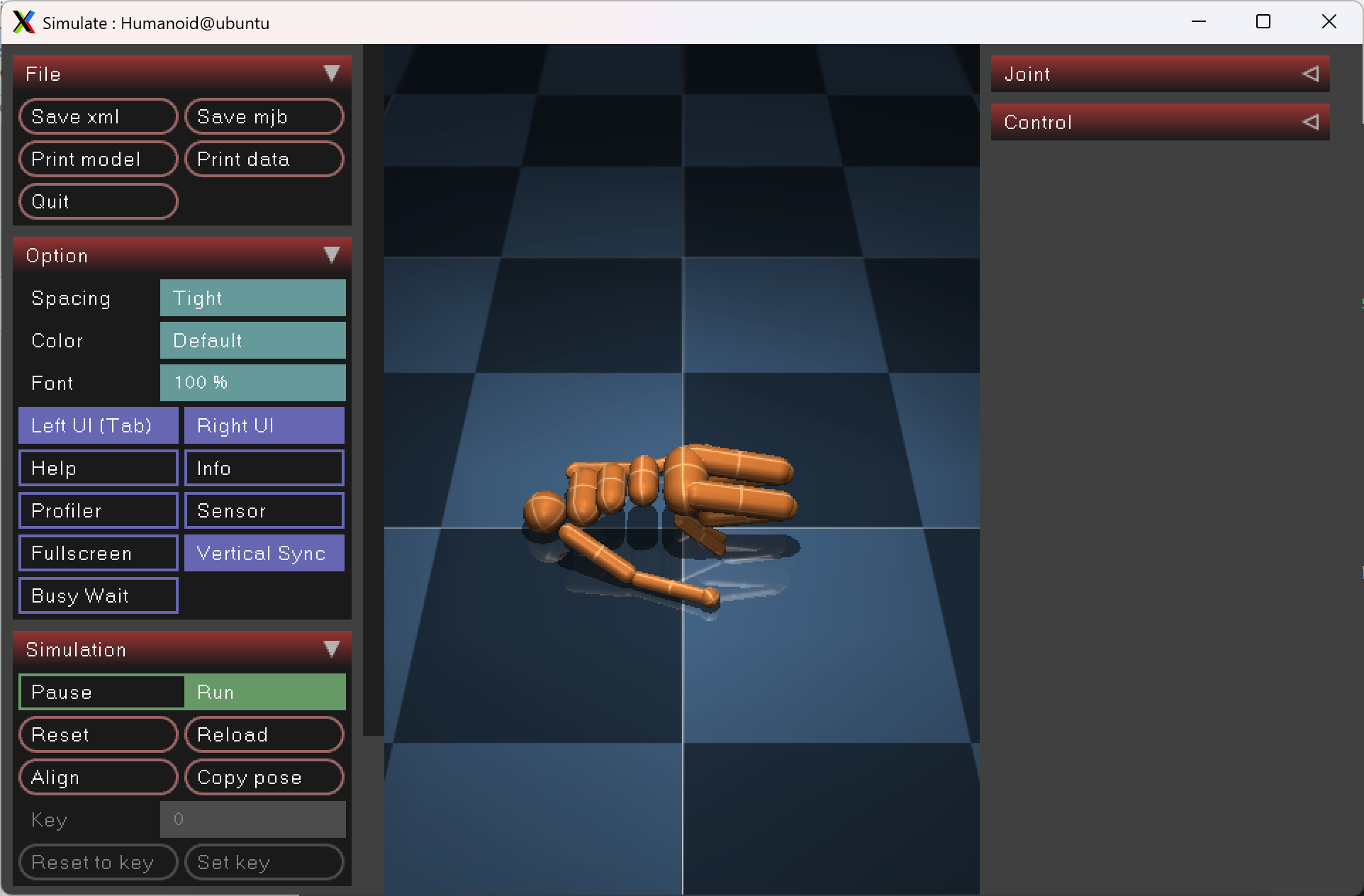
8、解压mujoco-py,进入文件夹,此过程不再赘述
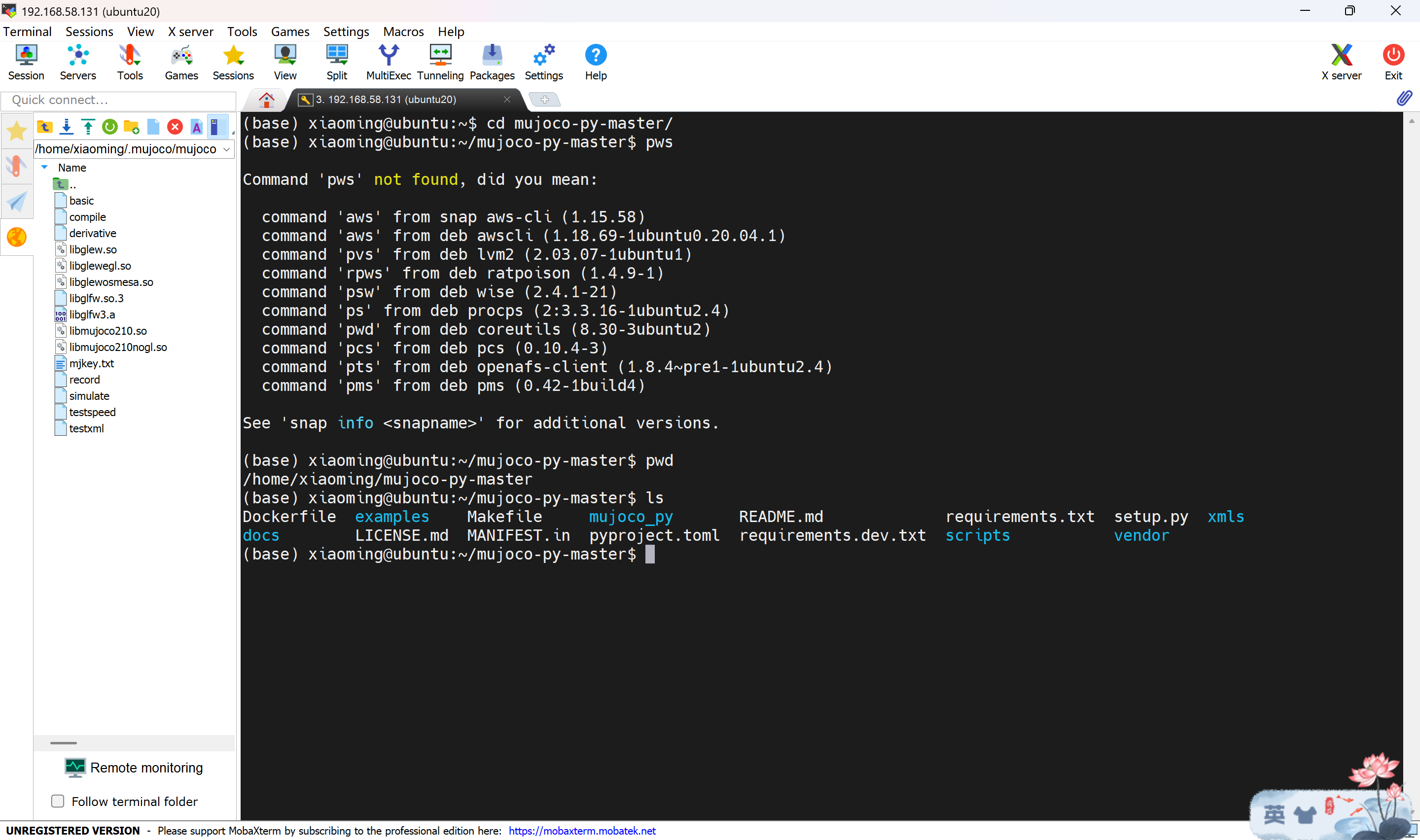
9、安装依赖、安装mujoco
#安装依赖
pip install -r requirements.txt
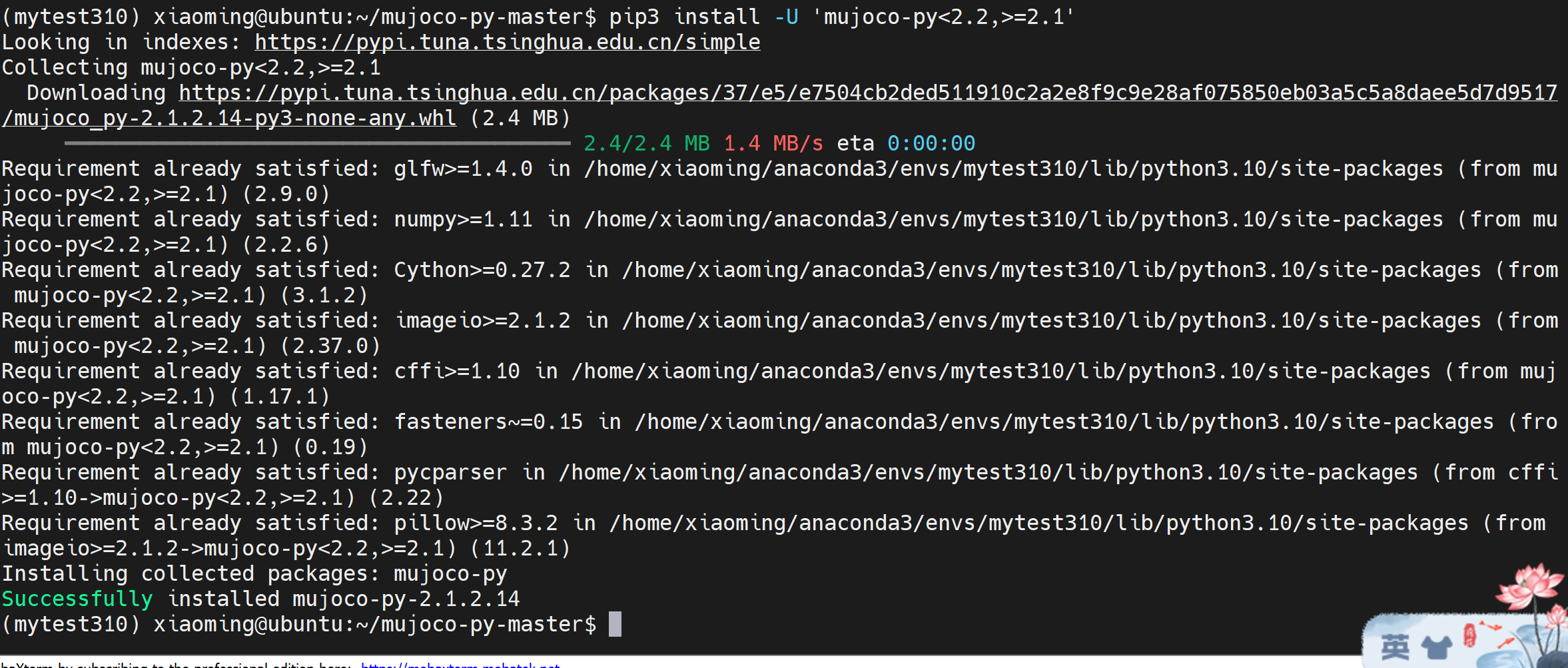
#安装mujoco_py
pip3 install -U 'mujoco-py<2.2,>=2.1'
10、在环境变量文件的后边加这句话
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia 11、刷新环境变量
source ~/.bashrc12、进入文件夹测试
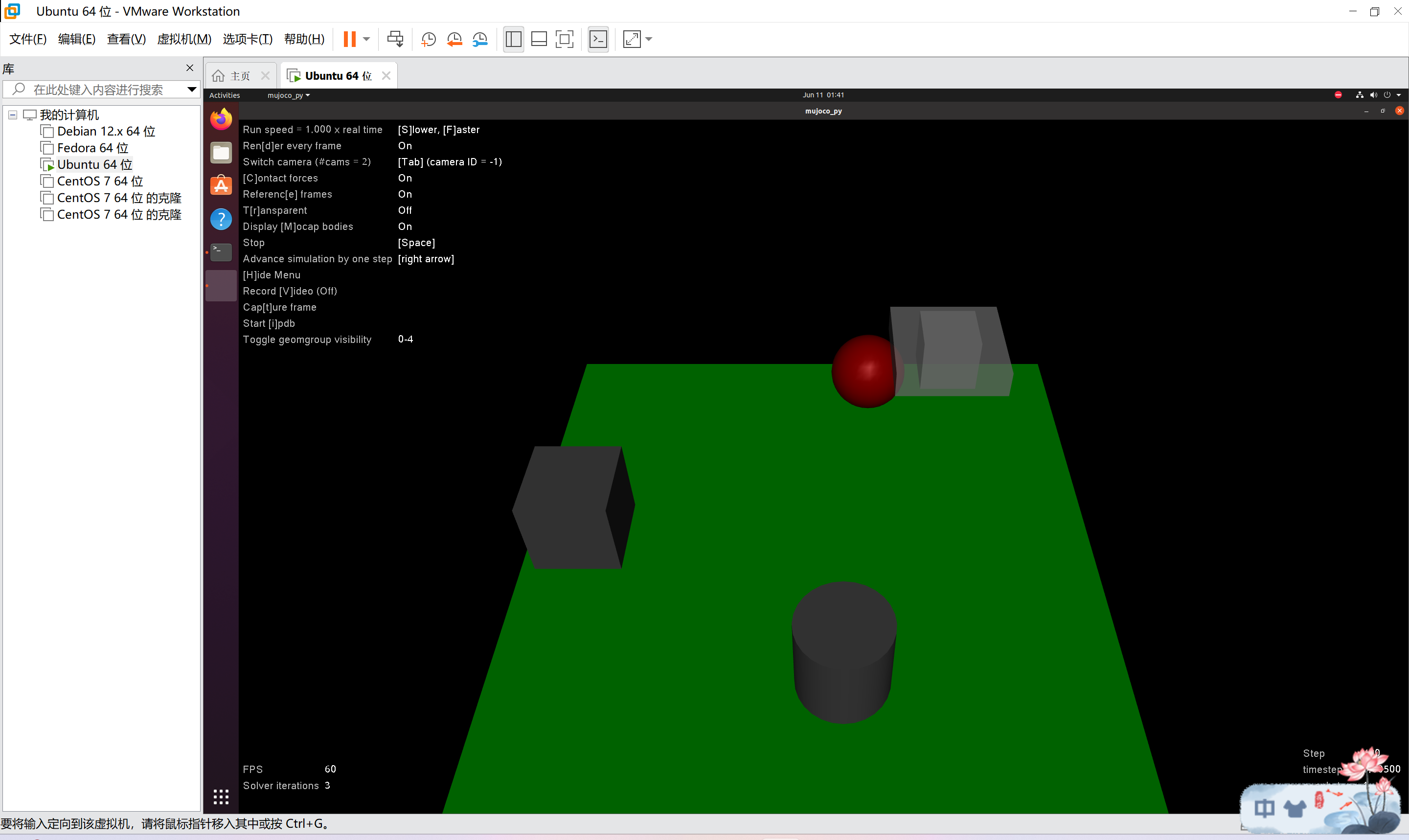
13、开始测试
python body_interaction.py14、第一次报错:
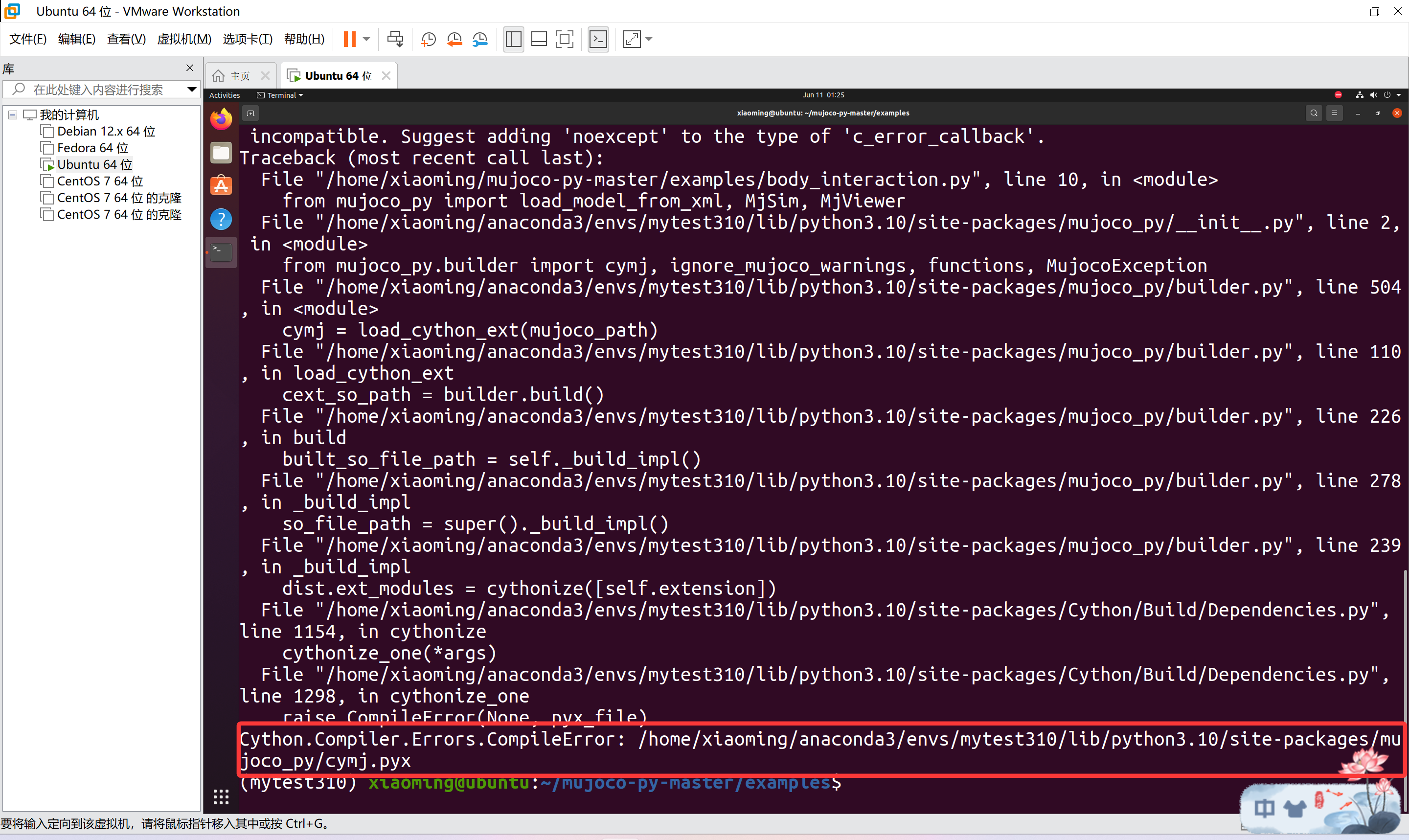
pip uninstall cython
pip install "cython<3"
15、第二次报错
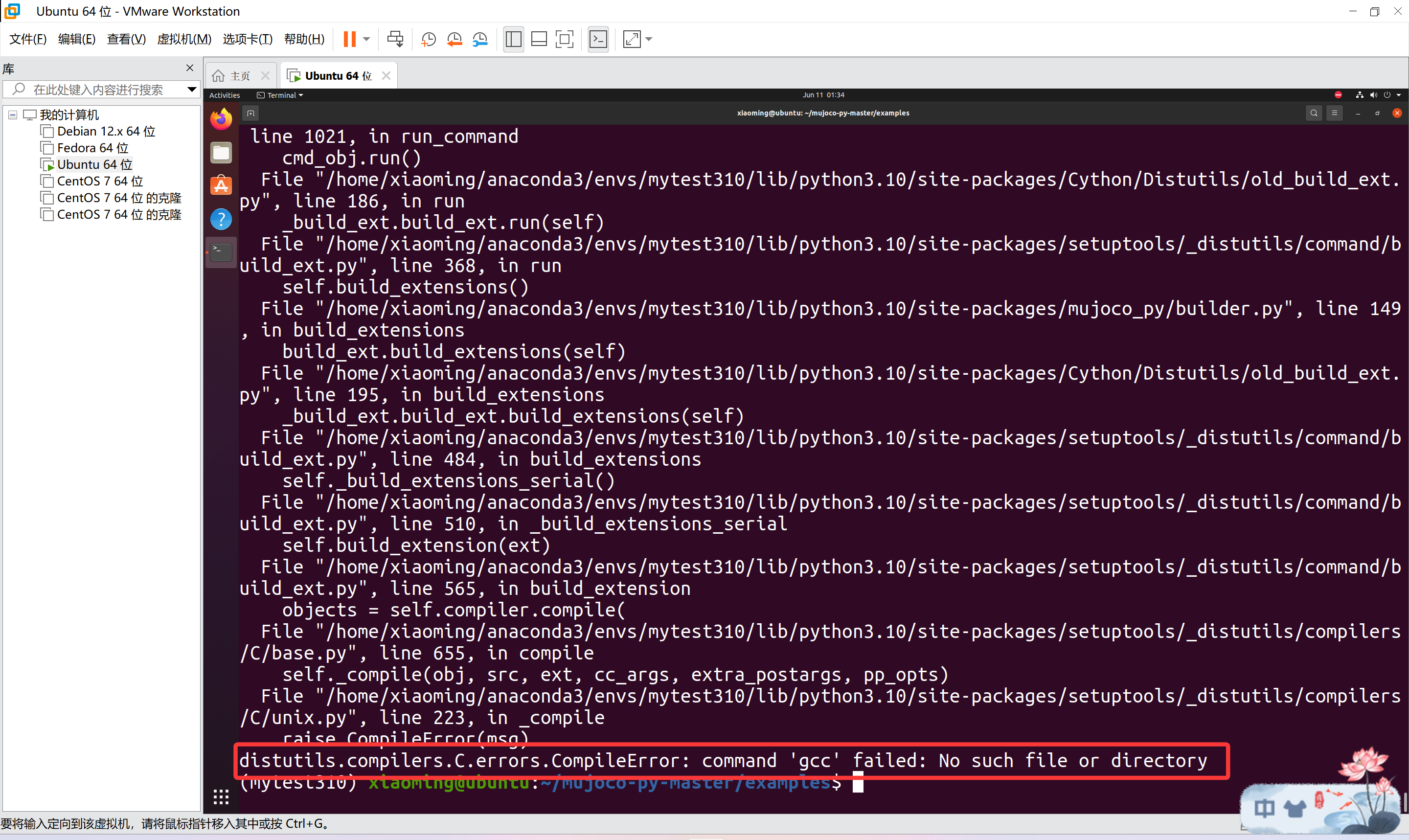
sudo apt install gcc -y16、第三次报错
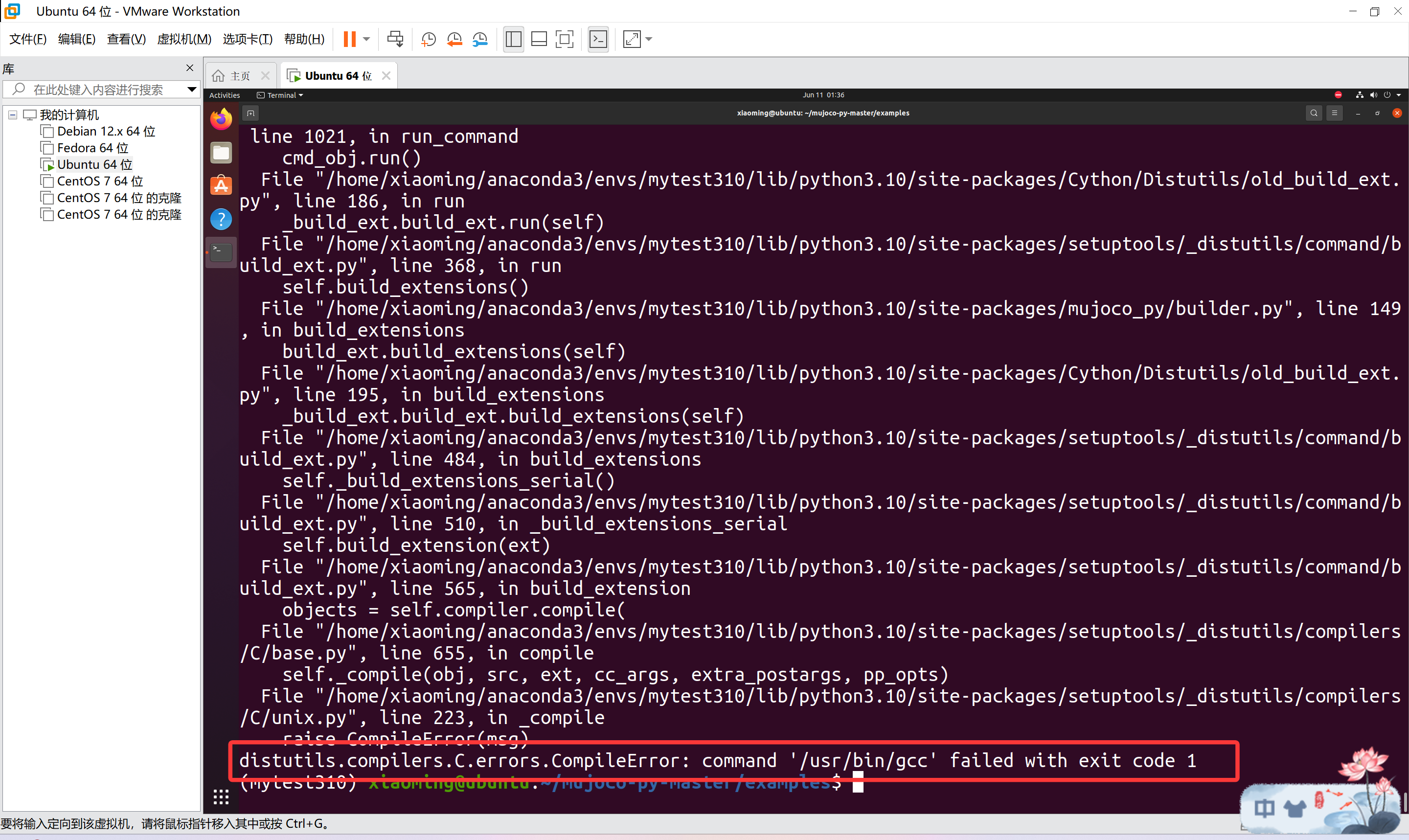
sudo apt-get install build-essential
sudo apt-get install build-essential libgl1-mesa-dev
sudo apt-get install libglew-dev libsdl2-dev libsdl2-image-dev libglm-dev libfreetype6-dev
sudo apt-get install libglfw3-dev libglfw3
#---------------------------------------------
sudo apt install libosmesa6-dev
pip install patchelf
sudo apt-get -y install patchelf
17、终于不报错了