【自动控制原理】分析和设计控制系统的性能(*^▽^*)
自动控制原理的核心是分析和设计控制系统的性能,稳定性、稳态性、瞬态性能是最基础的分类。以下从 概念分类、研究内容、分析方法、参数影响 四个维度帮你梳理清楚,附对比表格和学习技巧,帮你快速理清逻辑!
一、性能分类:稳定性、瞬态性能、稳态性能的本质区别
| 分类 | 研究阶段 | 核心目标 | 关键问题 | 判断依据/工具 |
|---|---|---|---|---|
| 稳定性 | 系统全过程(前提) | 系统是否发散(能否正常工作) | 自由响应是否衰减为零 | 极点位置(左半平面稳定)、劳斯判据、奈奎斯特判据 |
| 瞬态性能 | 过渡过程(动态) | 响应的快速性和振荡性(动态品质) | 上升时间、超调量、调整时间等 | 阶跃响应曲线、二阶系统公式(ζ, ωₙ) |
| 稳态性能 | 稳态阶段(静态) | 控制精度(误差是否满足要求) | 稳态误差是否足够小 | 静态误差系数(Kp, Kv, Ka)、终值定理 |
一句话总结:
- 稳定性是前提:不稳定的系统无法正常工作,无需分析瞬态和稳态。
- 瞬态性能看“速度与振荡”:比如电机启动时的快慢和抖动。
- 稳态性能看“精度”:比如恒温箱最终是否达到设定温度。
二、各性能的研究内容与方法
1. 稳定性分析
- 核心问题:系统是否稳定?
- 关键结论:
- 闭环传递函数的所有极点必须位于 s左半平面(含重根时临界稳定,实际工程中视为不稳定)。
- 右半平面极点数量 = 系统不稳定的“根源”。
- 分析方法:
- 直接法:求闭环极点(适用于低阶系统,如二阶)。
- 间接法:
- 劳斯判据:通过特征方程系数行列式判断右半平面极点数量(无需求根)。
- 奈奎斯特判据:通过开环频率特性判断闭环稳定性(频域视角)。
- 根轨迹法:分析参数(如K)变化时极点的移动轨迹,判断临界稳定的K值。
- 典型误区:
- 认为“开环极点在左半平面=系统稳定”(×)——必须看闭环极点!
- 忽略时延环节对稳定性的影响(时延会导致相位滞后,可能引发振荡)。
2. 瞬态性能分析(以二阶系统为例)
二阶系统标准形式:
[ G(s) = \frac{\omega_n2}{s2 + 2\zeta\omega_n s + \omega_n^2} ]
- 关键参数:
- 阻尼比 ζ:决定振荡程度(ζ=0 无阻尼等幅振荡;0<ζ<1 欠阻尼振荡;ζ≥1 过阻尼单调)。
- 自然频率 ωₙ:决定响应速度(ωₙ越大,上升时间越短)。
- 时域指标公式(欠阻尼情况,0<ζ<1):
指标 公式 影响因素
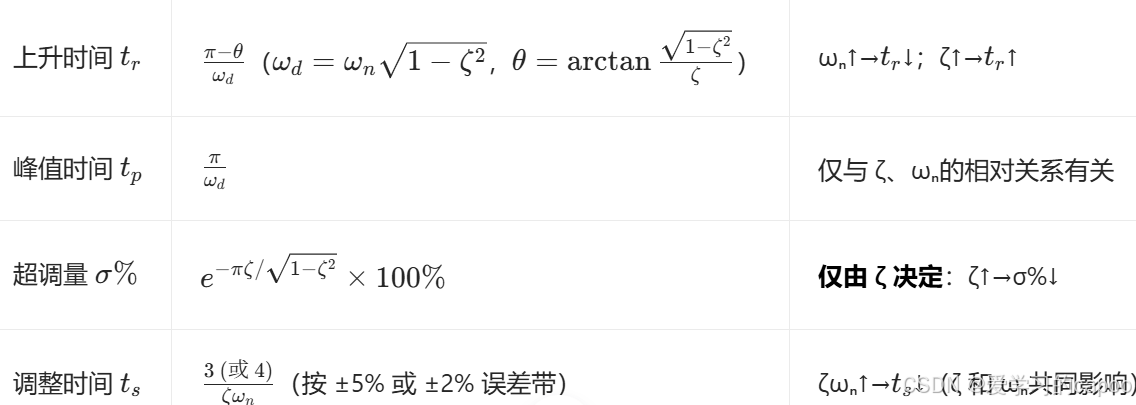
- 分析技巧:
- 若系统非标准二阶,可通过 主导极点近似(忽略远离虚轴的极点和零点)简化为二阶系统分析。
- 超调量只与ζ相关,调整时间与ζωₙ(阻尼自然频率)成反比,这是记忆重点!
3. 稳态性能分析
- 核心问题:系统稳态误差 ( e_{ss} ) 有多大?
- 关键公式:
- 终值定理法:( e_{ss} = \lim_{t\to\infty} e(t) = \lim_{s\to0} sE(s) )(需满足终值定理条件:( sE(s) ) 在虚轴及右半平面解析)。
- 静态误差系数法:
- 系统型别(开环传递函数中积分环节个数 ( v )):
- 0型系统(( v=0 )):对阶跃输入有稳态误差,对斜坡、加速度输入误差无穷大。
- I型系统(( v=1 )):对阶跃输入稳态误差为0,对斜坡输入有固定误差,对加速度输入误差无穷大。
- II型及以上:可跟踪加速度输入。
- 误差系数:
[
\begin{cases}
e_{ss_阶跃} = \frac{1}{1+K_p}, & K_p = \lim_{s\to0} G(s)H(s) \quad (\text{位置误差系数}) \
e_{ss_斜坡} = \frac{1}{K_v}, & K_v = \lim_{s\to0} sG(s)H(s) \quad (\text{速度误差系数}) \
e_{ss_加速度} = \frac{1}{K_a}, & K_a = \lim_{s\to0} s^2G(s)H(s) \quad (\text{加速度误差系数})
\end{cases}
]
- 系统型别(开环传递函数中积分环节个数 ( v )):
- 参数影响:
- 开环增益 K:增大K可减小稳态误差,但可能导致稳定性下降(如I型系统K过大时,ζ减小,超调量增大,甚至极点右移使系统不稳定)。
- 积分环节个数 v:增加v可提高系统型别,降低特定输入下的稳态误差,但会增加相位滞后,可能引发稳定性问题。
三、参数(T, ζ, ωₙ, K)对性能的影响总结
| 参数 | 物理意义 | 对稳定性的影响 | 对瞬态性能的影响 | 对稳态性能的影响 |
|---|---|---|---|---|
| ζ | 阻尼比(相对稳定性) | ζ↑→稳定性↑(极点左移) | ζ↑→超调量↓,上升时间↑ | 不直接影响,通过K间接关联 |
| ωₙ | 自然频率(绝对稳定性) | ωₙ不影响稳定性(仅位置) | ωₙ↑→响应速度↑(上升/调整时间↓) | 不直接影响 |
| K | 开环增益(放大系数) | K↑→可能导致不稳定(ζ↓) | K↑→等效ζ↓→超调量↑,调整时间可能变长 | K↑→稳态误差↓(需兼顾稳定性) |
| T | 时间常数(惯性环节参数) | T↑→极点左移→稳定性↑ | T↑→响应变慢(如RC电路充放电变慢) | 对稳态误差无影响(仅影响动态) |
记忆口诀:
- ζ管振荡,ωₙ管快慢:阻尼比决定超调量,自然频率决定速度。
- K是把双刃剑:提高精度(降误差)但可能牺牲稳定性。
- T越大越“迟钝”:惯性大,响应慢但更稳定。
四、数学工具的应用场景
| 工具 | 应用场景 | 典型用法 |
|---|---|---|
| 拉普拉斯变换 | 时域→频域转换,求解微分方程 | 求阶跃响应、脉冲响应 |
| 传递函数 | 复频域模型,描述系统输入输出关系 | 零极点分析、稳定性判断、串联/并联等效 |
| 零极点分析 | 稳定性(极点位置)、动态性能(零点影响) | 主导极点近似、零点对超调量的影响(如超前校正) |
| 阶跃响应公式 | 直接计算时域指标(尤其是二阶系统) | 用ζ和ωₙ公式快速求超调量、调整时间 |
五、学习技巧与避坑指南
- 先稳后动再稳态:
- 分析系统时,先判断稳定性(用劳斯判据或根轨迹看闭环极点),稳定后再分析瞬态和稳态性能。
- 二阶系统是核心:
- 吃透二阶系统的公式(超调量仅与ζ相关!调整时间与ζωₙ成反比!),高阶系统常简化为二阶主导极点分析。
- 对比记忆参数影响:
- 画表格对比ζ和K对超调量、稳态误差的影响(如ζ↑→超调量↓,K↑→超调量可能↑,因ζ↓)。
- 真题实战:
- 用典型例题练习:给定传递函数,求稳定性→瞬态指标→稳态误差,按步骤写公式,避免混淆。
- 误区警示:
- 不要混淆“开环”与“闭环”:稳定性看闭环极点,稳态误差用开环传递函数(通过误差系数)。
- 终值定理需满足条件:若闭环极点在虚轴或右半平面,不能用终值定理求稳态误差!
六、总结图示:性能分析逻辑链
系统模型(传递函数)↓
稳定性分析(闭环极点位置)↓ ↗ 不稳定:设计校正装置稳定?↓ ↘ 稳定:继续分析
瞬态性能分析(ζ, ωₙ计算指标)↓
稳态性能分析(K, v计算误差)↓
综合设计(调整K/ζ/ωₙ或添加校正环节,平衡性能)
通过以上框架,先分清楚“稳定性是基础,瞬态和稳态是进阶”。
一阶系统单位阶跃响应分析
对于一阶闭环系统,其传递函数为:
[
G(s) = \frac{1}{Ts + 1}
]
其中 ( T ) 为时间常数。单位阶跃响应(输入为 ( u(t) = 1 ) 时)的时域表达式为:
[
y(t) = 1 - e^{-t/T}
]
(1) 单位阶跃响应曲线绘制
我使用 MATLAB 在同一坐标系中绘制了当 ( T = 0.1, 1, 2, 5, 10 ) 时的单位阶跃响应曲线。时间范围设置为 ( t \in [0, 50] ) 秒(覆盖最大 ( T = 10 ) 的调节时间),步长为 0.1 秒。以下是生成的曲线图:
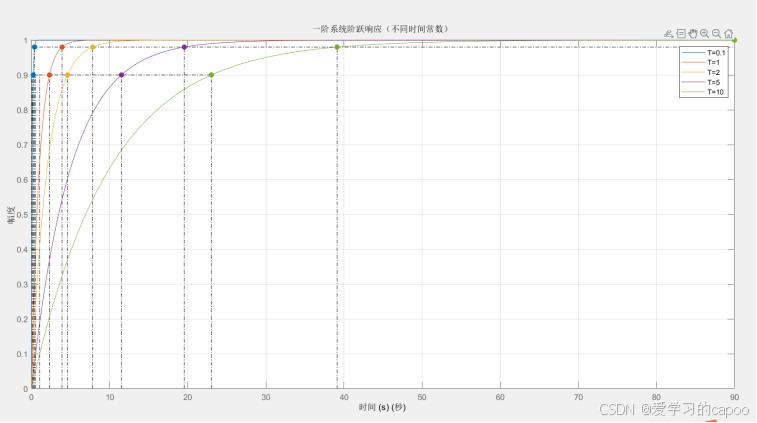
曲线行为总结:
- 所有曲线均从 ( y(0) = 0 ) 开始,单调上升至稳态值 1(无超调、无振荡)。
- ( T ) 越小,曲线上升越快(如 ( T = 0.1 ) 在 ( t = 0.5 ) 秒内接近稳态)。
- ( T ) 越大,曲线上升越慢(如 ( T = 10 ) 在 ( t = 40 ) 秒后才接近稳态)。
时间常数 ( T ) 对系统响应性能的影响分析
时间常数 ( T ) 是决定一阶系统动态性能的核心参数,直接影响以下指标:
-
上升时间(Rise Time, ( t_r )):
- 定义:输出从稳态值的 10% 上升到 90% 所需时间。
- 计算公式:( t_r \approx 2.2T )。
- 影响:( T ) 增加 → ( t_r ) 线性增加(响应变慢)。
- 示例:
- ( T = 0.1 ) → ( t_r \approx 0.22 ) 秒
- ( T = 10 ) → ( t_r \approx 22 ) 秒
-
调节时间(Settling Time, ( t_s )):
- 定义:输出进入并保持在稳态值 ±2%(或 ±5%)误差带内所需时间。
- 计算公式:
- ±5% 准则:( t_s \approx 3T )(因 ( e^{-3} \approx 0.05 ))
- ±2% 准则:( t_s \approx 4T )(因 ( e^{-4} \approx 0.018 ))
- 影响:( T ) 增加 → ( t_s ) 线性增加(系统收敛变慢)。
- 示例(±2% 准则):
- ( T = 0.1 ) → ( t_s \approx 0.4 ) 秒
- ( T = 10 ) → ( t_s \approx 40 ) 秒
-
响应速度:
- ( T ) 越小 → 指数项 ( e^{-t/T} ) 衰减越快 → 系统更快达到稳态(如 ( T = 0.1 ) 在 ( t = 0.5 ) 秒时 ( y \approx 0.993 ))。
- ( T ) 越大 → 衰减越慢 → 系统更慢达到稳态(如 ( T = 10 ) 在 ( t = 10 ) 秒时 ( y \approx 0.632 ),在 ( t = 40 ) 秒时 ( y \approx 0.982 ))。
-
稳态误差:
- 一阶系统对单位阶跃输入的稳态误差恒为 0(因 ( \lim_{t \to \infty} y(t) = 1 )),与 ( T ) 无关。
-
动态特性总结:
- ( T ) 量化系统惯性:大 ( T ) 表示系统“惯性大”,响应迟钝;小 ( T ) 表示“惯性小”,响应敏捷。
- 设计意义:在实际工程中(如温度控制、电机调速),需根据需求选择 ( T ):
- 快速响应场景(如电子电路)→ 选用小 ( T )(如 ( T < 1 ))。
- 慢速平滑场景(如大型机械系统)→ 选用大 ( T )(如 ( T > 5 ))。