任务管理
- 1、任务状态
- 2、常用函数
- 2.1 任务挂起函数vTaskSuspend()
- 2.2 任务恢复函数vTaskResume()和xTaskResumeFromISR()
- 2.3 任务删除函数 vTaskDelete()
- 2.4 任务延时函数vTaskDelay()和vTaskDelayUntil()
- 3、总结
1、任务状态
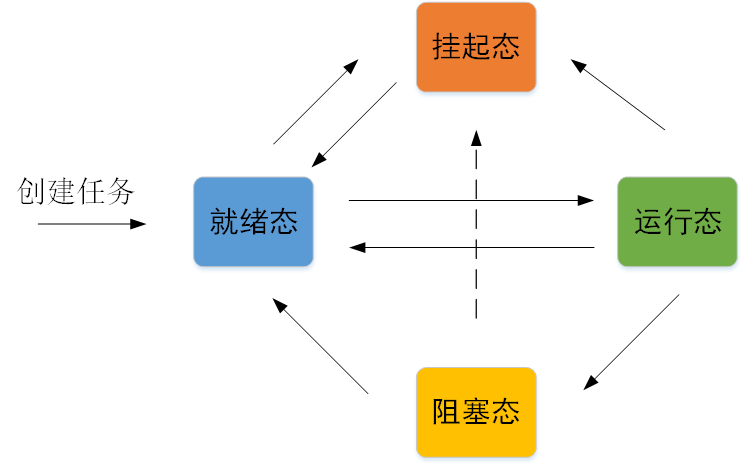
就绪态:该任务在就绪列表中,就绪的任务已经具备执行的能力,只等待调度器进行调度,新创建的任务会初始化为就绪态。
运行态:该状态表明任务正在执行,此时它占用处理器,FreeRTOS调度器选择运行的永远是处于最高优先级的就绪态任务,当任务被运行的一刻,它的任务状态就变成了运行态。
阻塞态:如果任务当前正在等待某个时序或外部中断,我们就说这个任务处于阻塞状态,该任务不在就绪列表中。包含任务被延时、任务正在等待信号量、读写队列或者等待读写事件等。
挂起态:处于挂起态的任务对调度器而言是不可见的,让一个任务进入挂起状态的唯一办法就是调用 vTaskSuspend()函数;而 把 一 个 挂 起 状态 的 任 务 恢复的 唯 一 途 径 就 是 调 用 vTaskResume() 或vTaskResumeFromISR()函数。 |
2、常用函数
2.1 任务挂起函数vTaskSuspend()
| 任务可以通过调用 vTaskSuspend()函数都可以将处于任何状态的任务挂起,被挂起的 任务得不到 CPU 的使用权,也不会参与调度,它相对于调度器而言是不可见的,除非它从 挂起态中解除。 |
void vTaskSuspend( TaskHandle_t xTaskToSuspend )
| xTaskToSuspend 为任务句柄,传入 NULL 表示挂起当前任务 |
2.2 任务恢复函数vTaskResume()和xTaskResumeFromISR()
| 任务恢复就是让挂起的任务重新进入就绪状态,恢复的任务会保留挂起前的状态信息,在恢复的时候根据挂 起时的状态继续运行。如果被恢复任务在所有就绪态任务中,处于最高优先级列表的第一 位,那么系统将进行任务上下文的切换。xTaskResumeFromISR()与 vTaskResume()一样都是用于恢复被挂起的任务,不一样的是 xTaskResumeFromISR() 专 门 用 在 中 断 服 务 程 序 中 。无 论 通 过 调 用 一 次 或 多 次vTaskSuspend()函数而被挂起的任务,也只需调用一次xTaskResumeFromISR()函数即可解挂。 |
void vTaskResume( TaskHandle_t xTaskToResume) BaseType_t xTaskResumeFromISR( TaskHandle_t xTaskToResume )
2.3 任务删除函数 vTaskDelete()
| vTaskDelete()用于删除一个任务。当一个任务删除另外一个任务时,形参为要删除任 务创建时返回的任务句柄,如果是删除自身, 则形参为 NULL。 |
void vTaskDelete( TaskHandle_t xTaskToDelete )
2.4 任务延时函数vTaskDelay()和vTaskDelayUntil()
| vTaskDelay()延时是相对性的延时,它指定的延时时间是从调用 vTaskDelay()结束后开 始计算的,经过指定的时间后延时结束。绝对延时函数 vTaskDelayUntil(),这个绝 对延时常用于较精确的周期运行任务,比如我有一个任务,希望它以固定频率定期执行, 而不受外部的影响,任务从上一次运行开始到下一次运行开始的时间间隔是绝对的,而不 是相对的。 |
void vTaskDelay( const TickType_t xTicksToDelay ) void vTaskDelayUntil( TickType_t * const pxPreviousWakeTime, const TickType_t xTimeIncrement )
pxPreviousWakeTime:上一次唤醒任务的时间点
xTimeIncrement :任务周期时间
3、总结
| 以上就是FreeRTOS任务管理的一些基础知识了,浏览过程中,如若发现错误,欢迎大家指正,有问题的欢迎评论区留言或者私信。最后,如果大家觉得有所帮助,可以点一下赞,谢谢大家!祝大家天天开心,顺遂无虞! |