毫米波雷达基础理论(3D+4D)
3D、4D毫米波雷达基础知识及厂商选型
PreView : https://mp.weixin.qq.com/s/bQkju4r6med7I3TBGJI_bQ
1. FMCW毫米波雷达基础知识
主要参考博文:
-
一文入门汽车毫米波雷达基本原理 :https://mp.weixin.qq.com/s/_EN7A5lKcz2Eh8dLnjE19w
-
毫米波雷达基础知识(一) https://zhuanlan.zhihu.com/p/416269210
-
毫米波雷达基础知识(二)https://zhuanlan.zhihu.com/p/416835851
77GHZ长距 中距 大陆毫米波雷达
后续查看复习资料时,可以只关注结论公式,了解影响毫米波雷达的的关键指标因素即可****。
1.0 介绍
调频连续波 FMCW 雷达 :
FMCW雷达通过反射信号的相位以及频率来定位、测速、测角等,这与激光雷达周期性发射短脉冲然后通过直接测量返回时间的原理不同。
用2Tx天线加4Rx天线就能做到多目标检测。
Framework : 发送天线、接受天线、混频器、时钟源、ADC & DSP
Workflow : 合成器生成一个线性调频脉冲 - TX天线发射 - 物体反射 - RX天线捕捉 - 混频器将TX + RX 信号合并到一起 - 生成中频(IF)信号 - ADC - DSP


1.1 测距原理
(1) 雷达信号
以单个物体检测为例,使用时间对频率(f - t )图像对于 Tx、Rx 以及混频的 IF 信号的表示如下所示:
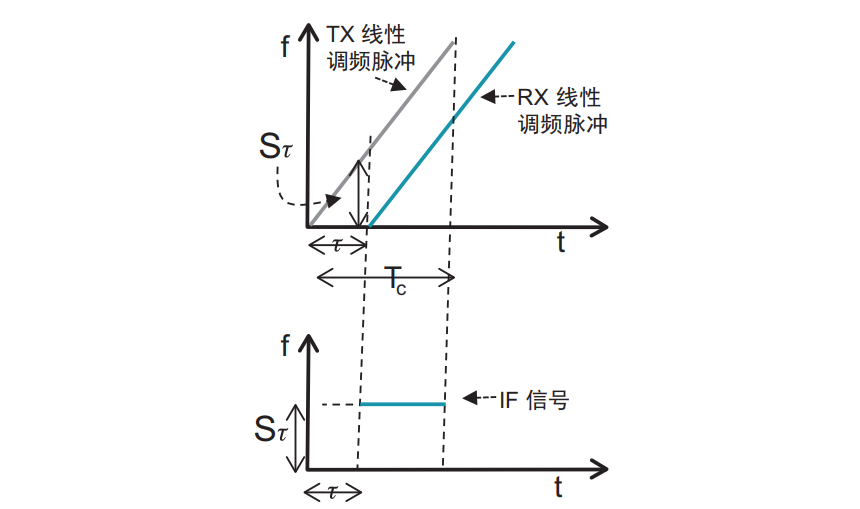
FMCW测距原理信号图像
可以看出混频信号IF是一个频率固定的正弦信号:
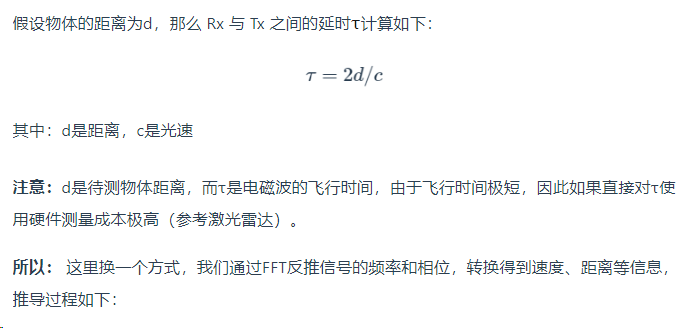
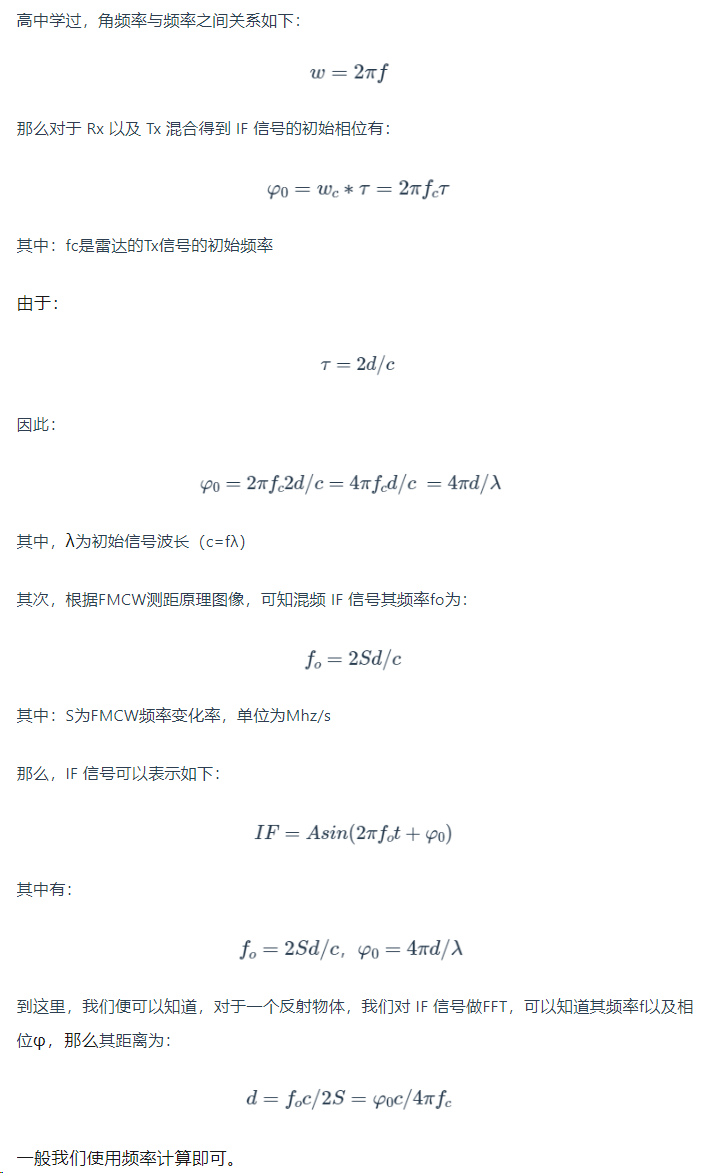
(2) 距离计算
-------------------------------------背景-----------------------------------------
--------------------------------毫米波测距原理---------------------------------
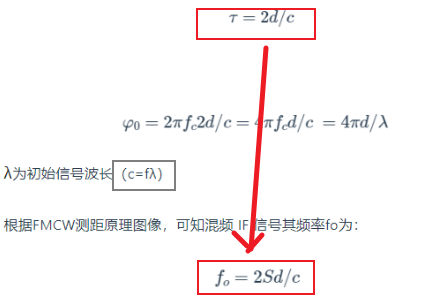
注:下面混频信号 f0 = 2Sd/c >> 可以参考 (1) 雷达信号中图 >> tao = 2d/c >> f0 = tao*S
f0 = S*tao
tao = 2d/c
f0 = S*tao = S2d/c
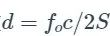
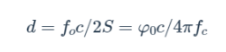
d = f0c/2S
(3) 多目标距离测算
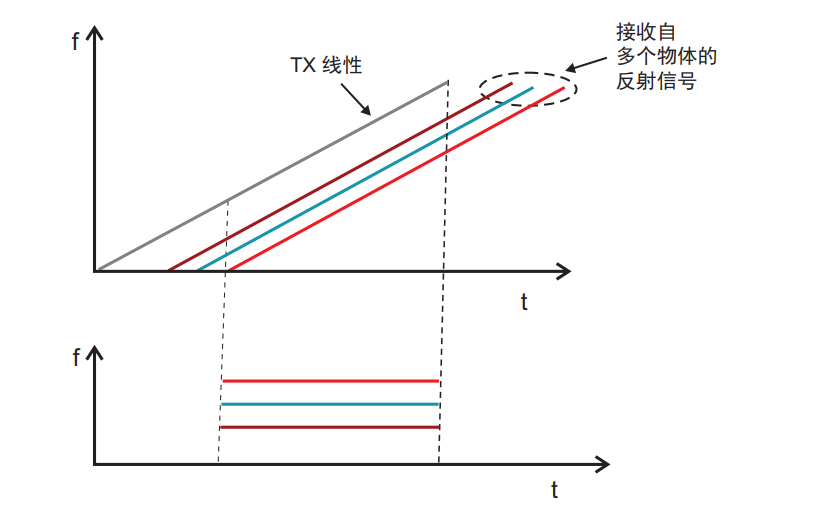
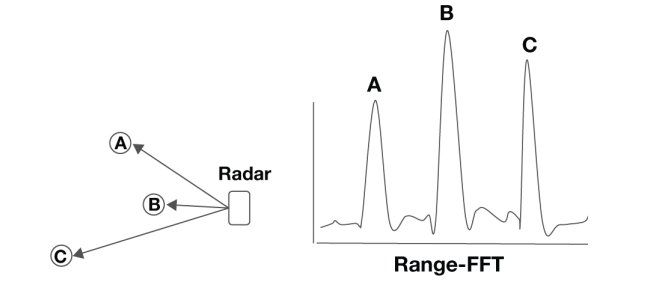
距离公式 f0为混频信号频率 S为线性调频信号-频率变化率
**单目标测距和多目标测距原理 **
可以参考下面的博文辅助:
https://blog.csdn.net/qq_39764867/article/details/108479411
https://www.zhihu.com/question/305719355
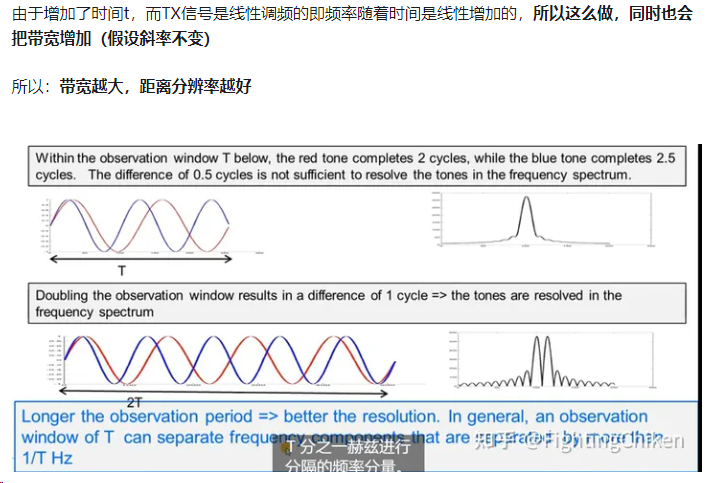
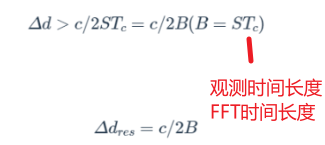
(4) 距离分辨率
>> 距离分辨率是辨别两个或更多物体的能力。****当两个物体靠的足够近的时候,它们两个的回波会非常相似,距离分辨率就是衡量雷达能区分靠的很近的物体的能力的一个指标,下图中两个中频信号频率太接近了,导致在频域图上只显示了一个主瓣
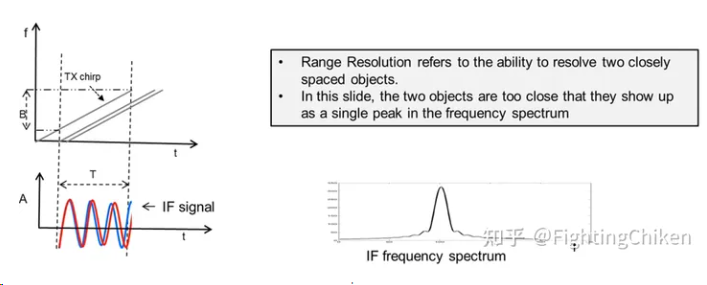
---------------------------------计算方式------------------------------------
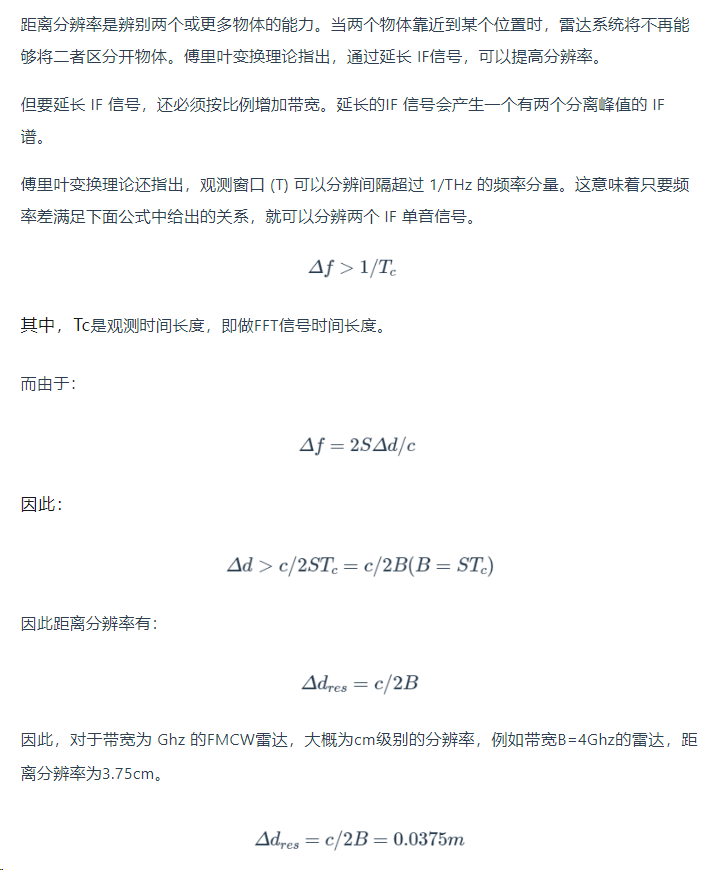
B为带宽 – 4GHz (77-81GHz)
注:详细可参考:https://zhuanlan.zhihu.com/p/669691738
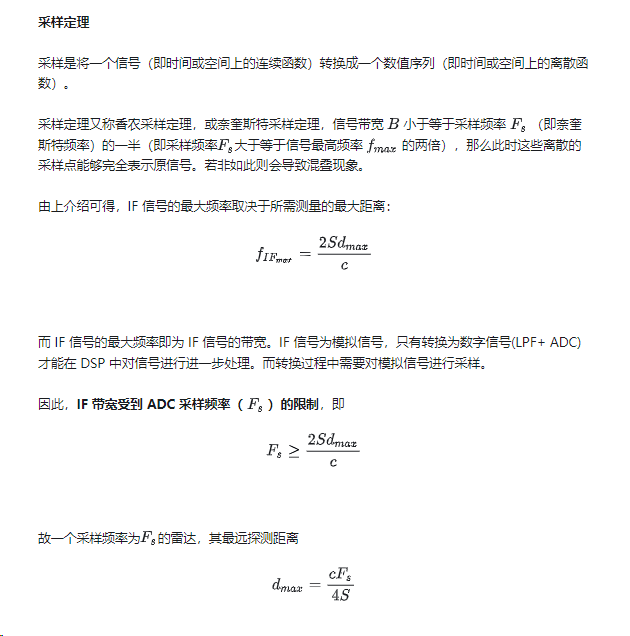
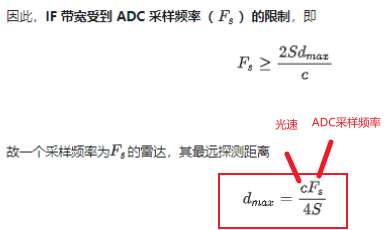
(5) 最大测量距离的来源-采样定理
补充: https://zhuanlan.zhihu.com/p/416269210
IF带宽 受到 ADC 采样频率(Fs)的限制,
1.2 测速原理
测速 :https://blog.csdn.net/qq_39764867/article/details/108833827
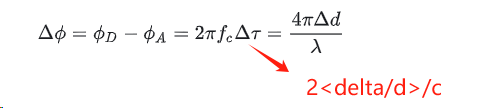
中频信号的相位对物体范围的微小变化非常敏感。一定距离的物体产生一定频率和相位的中频信号,物体的微小运动会改变 IF 信号的相位,但不会改变频率(微小的频率变化在频谱中是无法辨别的)。
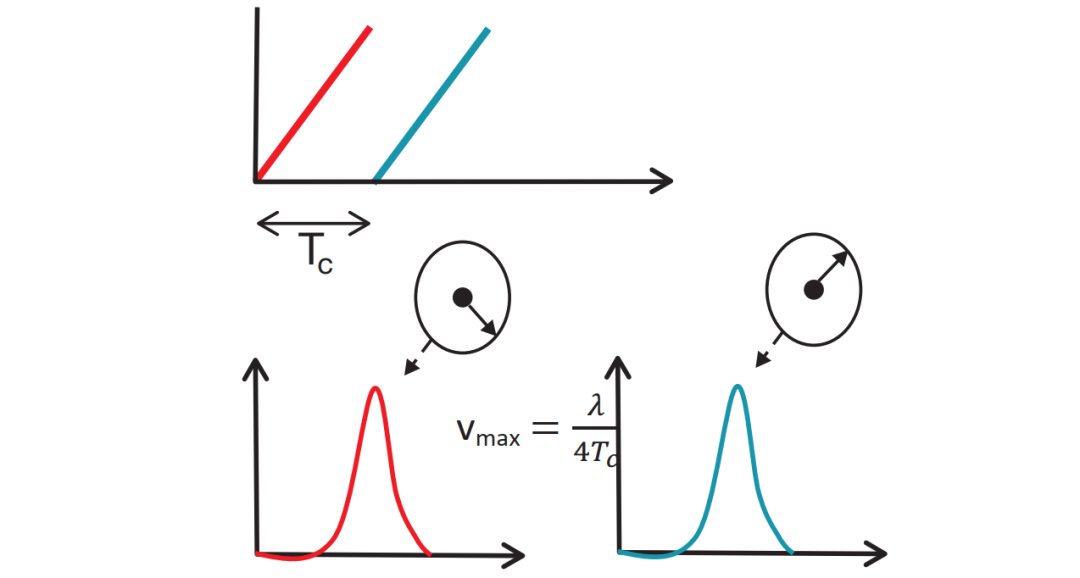
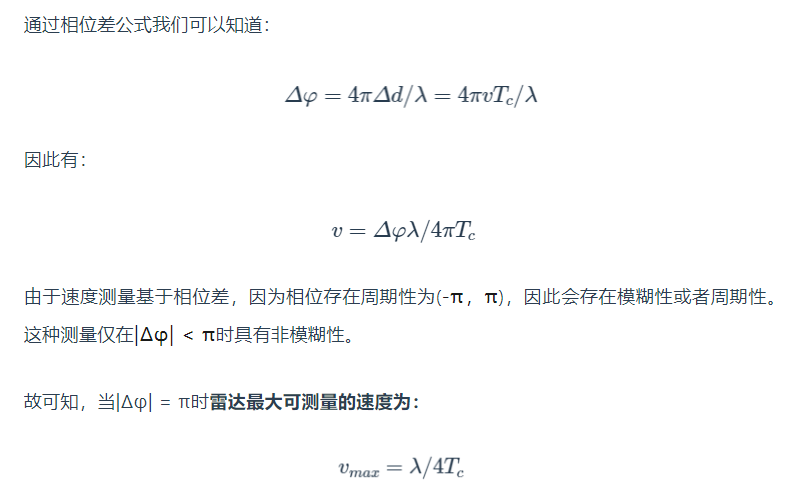
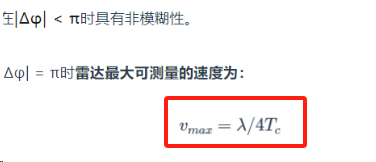
(1) Radar测速信号及最大速度
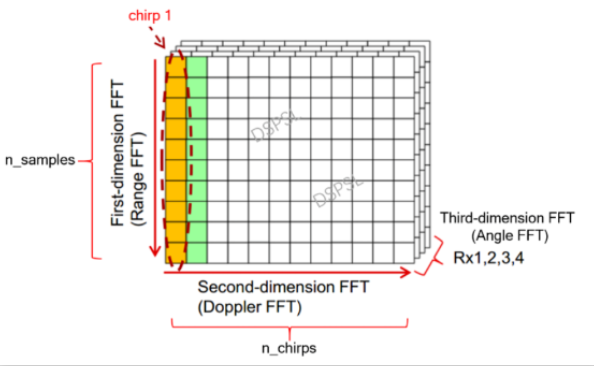
为了测量速度, FMCW 雷达会发射两个间隔为Tc的线性调频脉冲。每个反射的线性调频脉冲通过 FFT加以处理,以便检测物体的距离,这个FFT称之为距离FFT。对应于每个线性调频脉冲的距离 FFT 将在同一位置出现峰值,但相位不同。该测得的相位差对应于速度为vTc的物体的移动
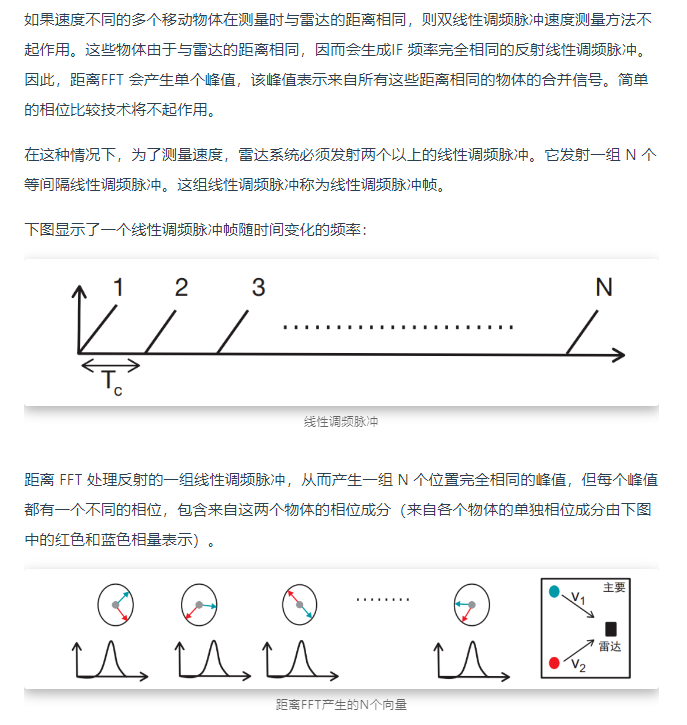
(2) 同一位置不同物体速度测算
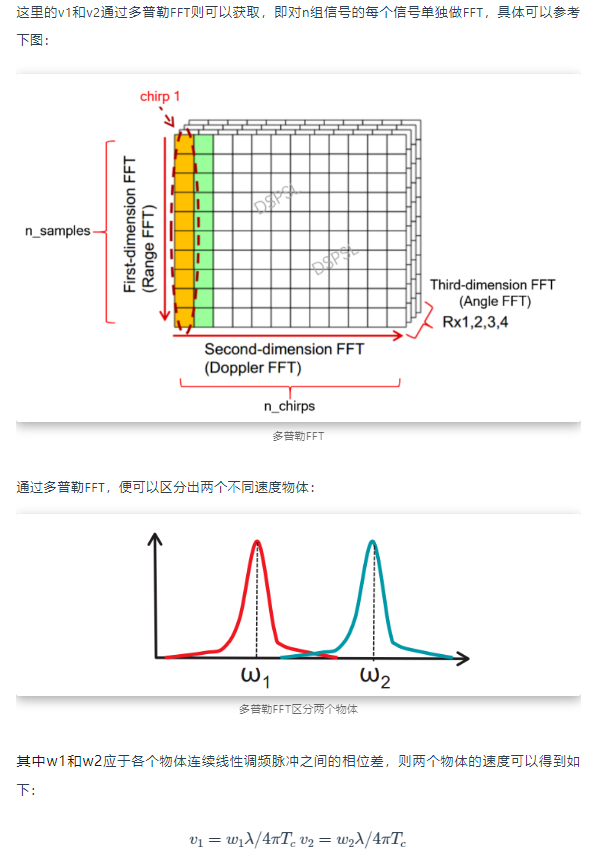
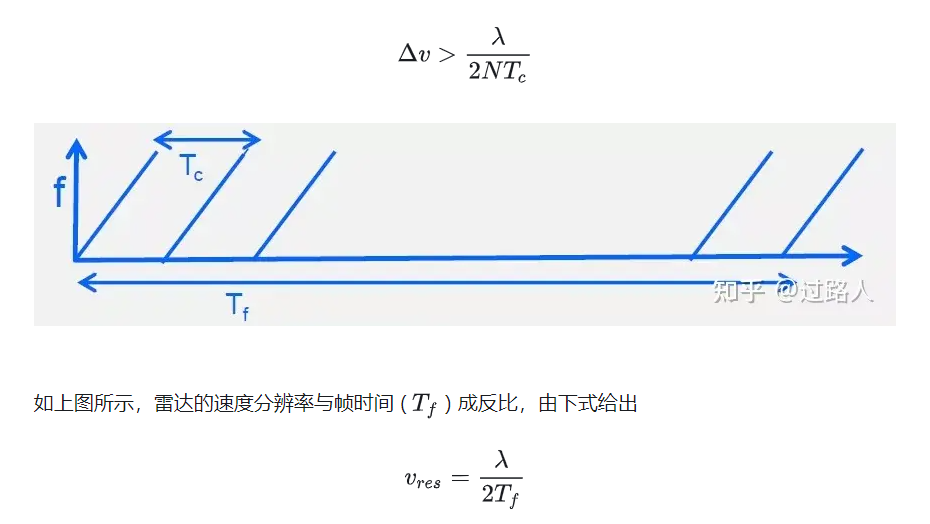
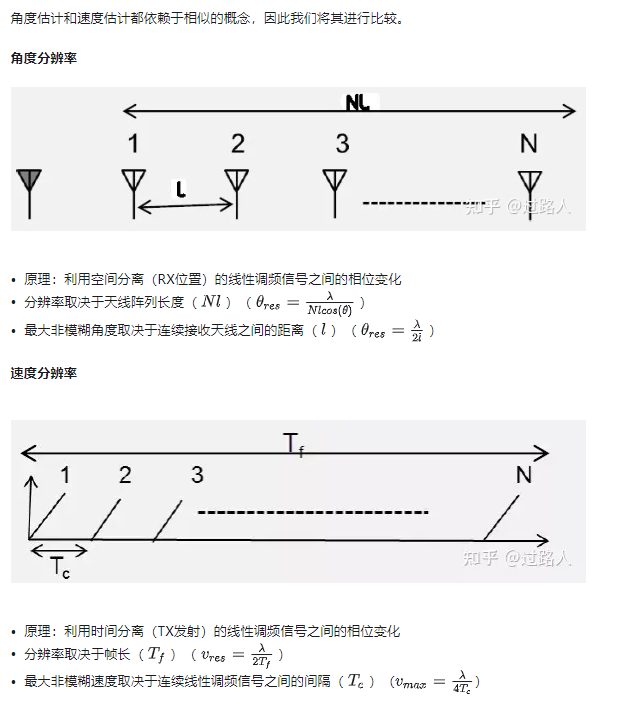
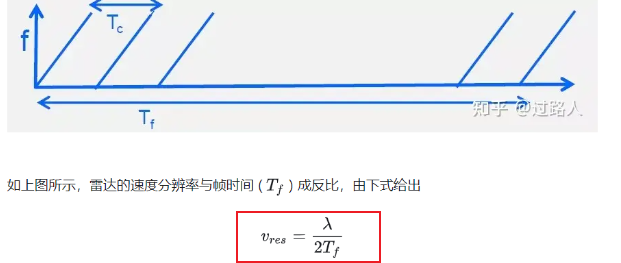
(3) 速度分辨率
1.3 角度测量
(1) 角度测量条件
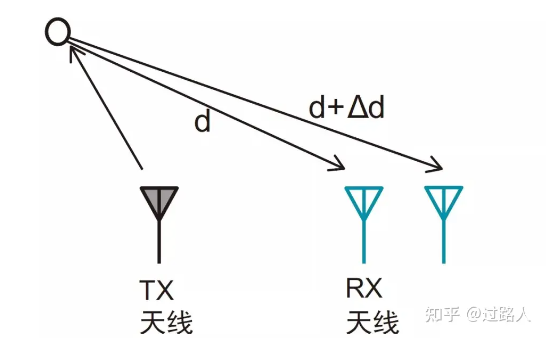
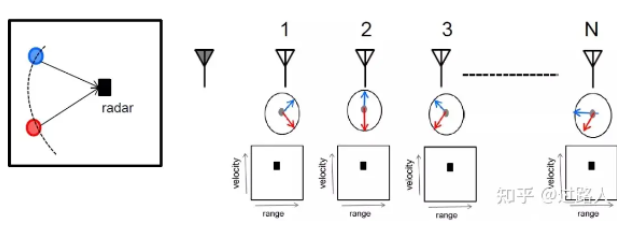
FMCW 雷达系统可以使用水平面估算反射信号的角度,该角度也称为到达角 (AoA),如下图所示:
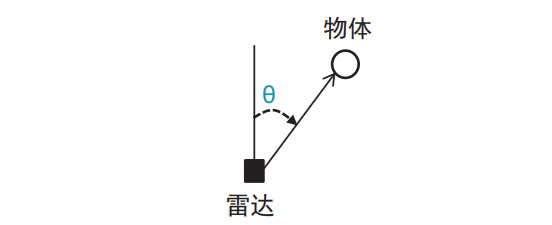
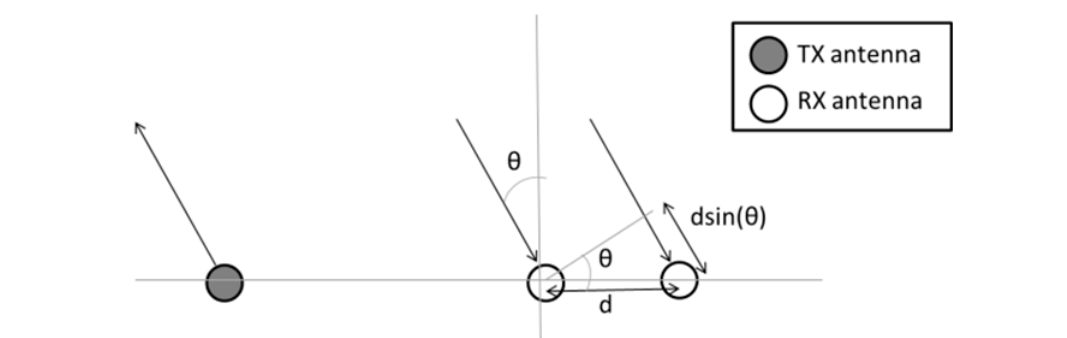
需要注意的是雷达估算角度至少需要两个 Rx 天线,如下图所示:
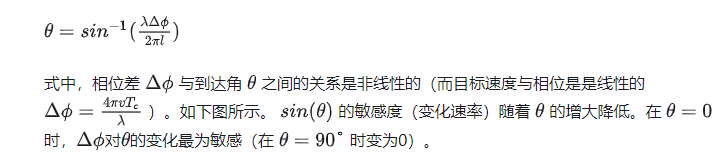
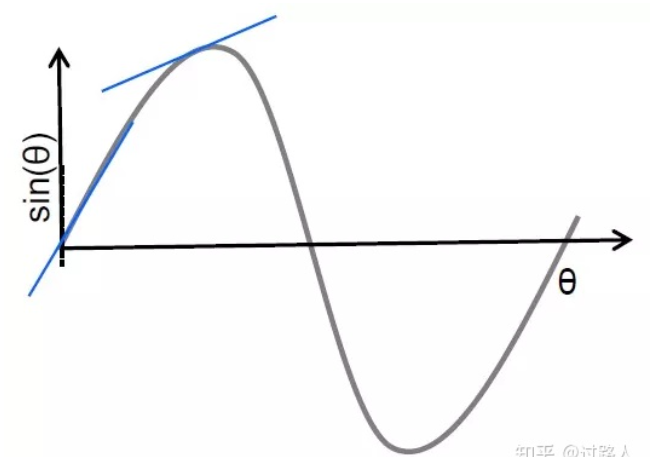
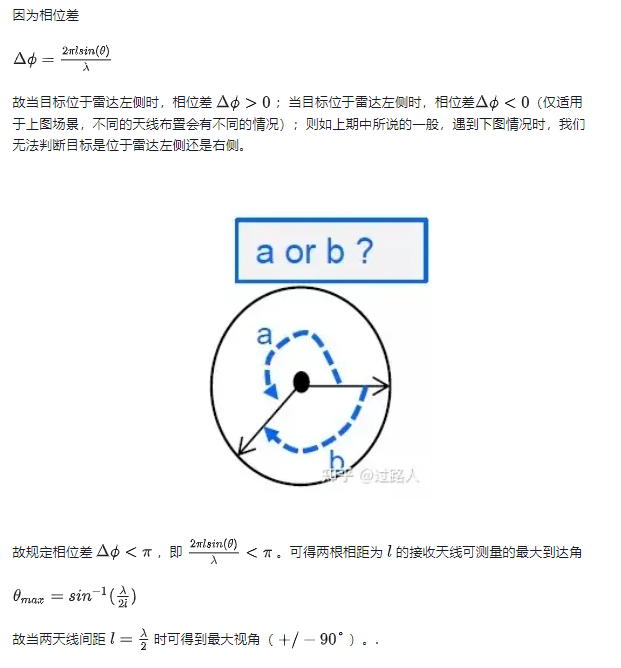
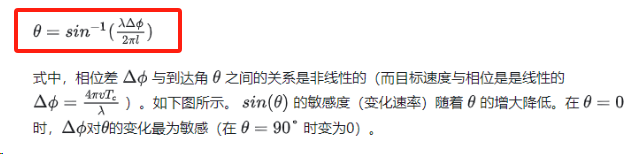
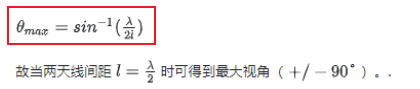
(2) 到达角 (AoA) 估计 - 最大AoA

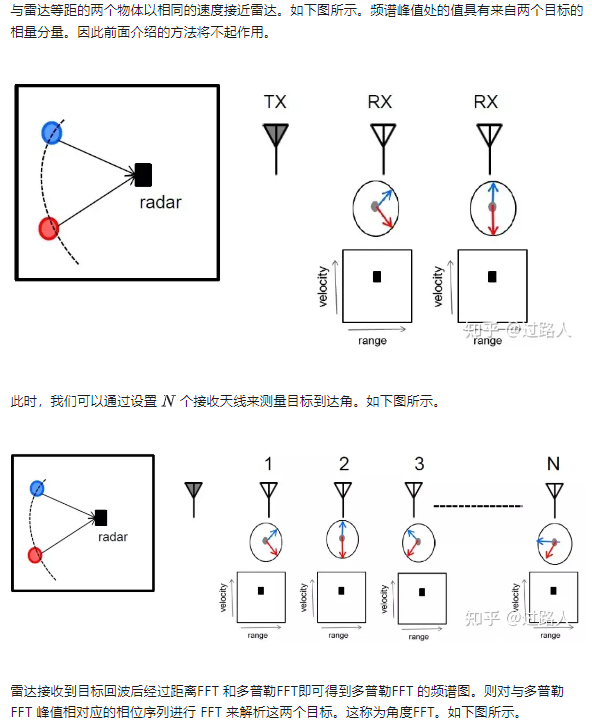
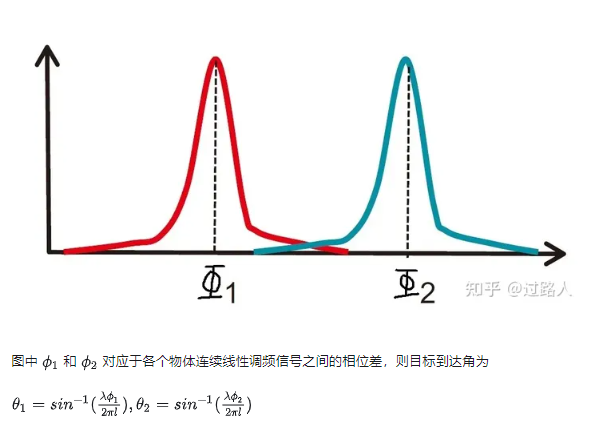
(3) 相同距离、速度的多个物体的到达角(AoA)测量
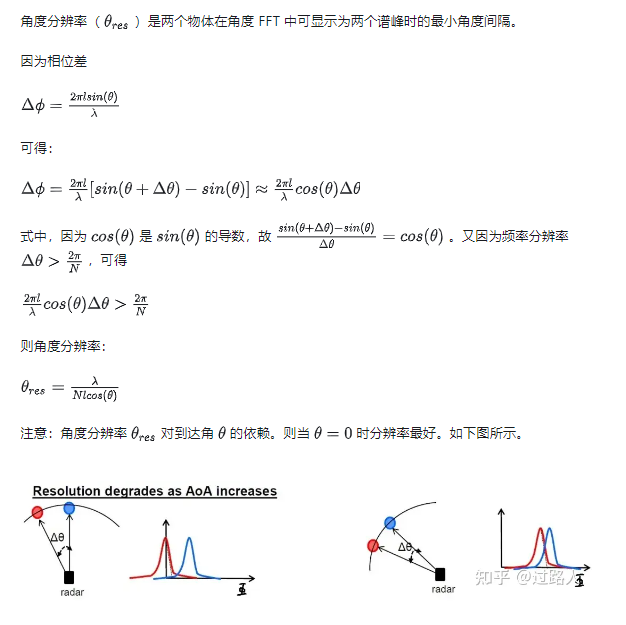
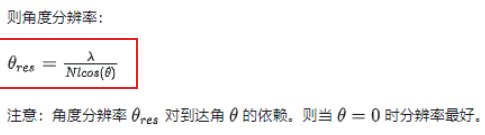
(4) 角度分辨率
1.4 总结
(1) 速度估计和角度估计比较
(2) Radar核心公式总结
测距
fc为Tx信号频率,f0是Mixer产生的中频信号频率,c是光速,S是频率变化率;
距离分辨率 - 依据采样定理
最大测量距离 - 依据ADC的采样频率
采样频率大于某个值的时候,ADC采集的离散序列才能 准确 表征(还原)原始的模拟信号
测速
不同距离物体测速

同距离物体测速 - 发射一组N个调频波 进行多普勒FFT

可测最大速度 - 由相位差模糊性得到–必须小于PI – Tc是一组调频波中两辆间隔时间
速度分辨率 – 与帧时间成反比 帧时间==Tc*N(N个连续波)
测角度
角度测量必须使用两个及以上的Rx天线
普通场景的测量 - 两个Rx天线即可
到达角AoA计算公式:
相同距离及速度的两个物体的测量 - 需要一组多个Rx天线
到达角计算 - 对与多普勒FFT峰值对应的相位序列进行FFT(角度FFT)解析这两个目标。

最大到达角
角度分辨率 - 与 【 Rx天线之间的距离 + RX个数 + 到达角 + 波长】 有关系
2. 4D毫米波雷达原理
车载毫米波雷达介绍【强烈推荐,包含了1中的理论知识,4D毫米波在文章后半部分】
https://mp.weixin.qq.com/s/6pEN9n9O8npk67Jutk1Trw
https://mp.weixin.qq.com/s/2n9LvuXCMNyKW3lYxloLZQ
对于一维的天线,此前已经分析过了,可以获得方位角。换个平面视角来看,沿着Y方向也有一列天线,可以获得物体沿着X轴的方位角θ2。
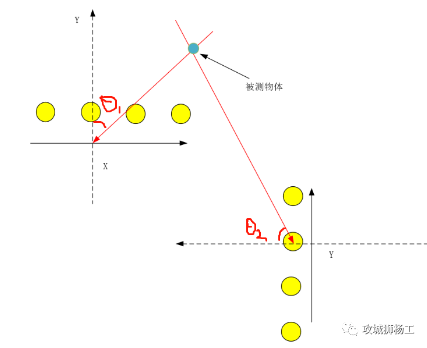
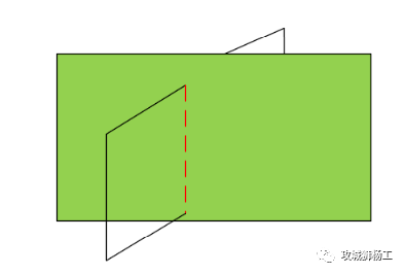
则通过两列天线就可以定位物体在空间的一条线上,如下图的红色虚线所示。(两个平面的交集是一条线)。
被测物体就在空间的这条线上,要知道我们还有距离信息,根据距离信息,就可以确定被测物体在这条线上的具体位置了,随后就可以获得俯仰角信息θ3。
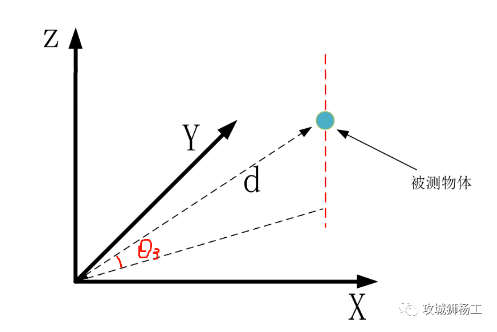
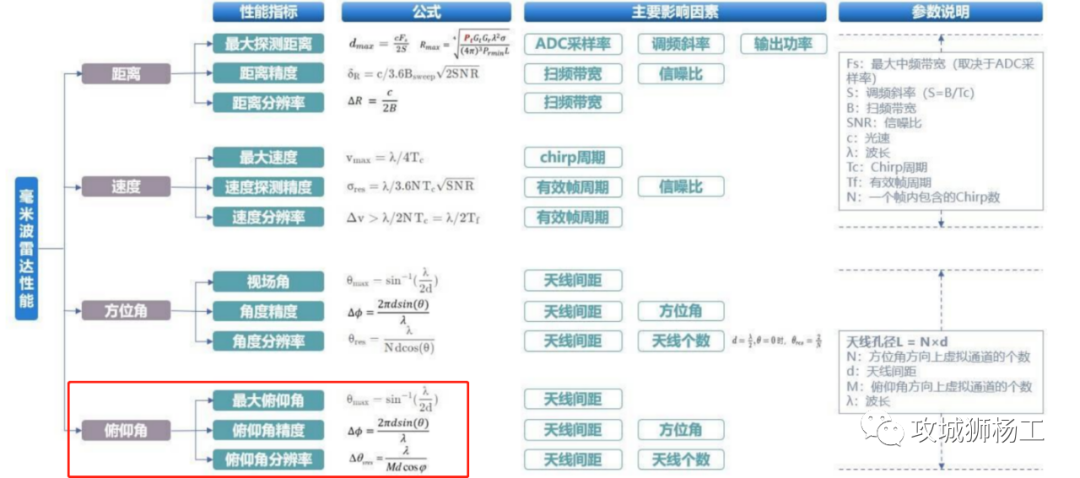
综上,我们可以说二维分布的天线阵列,就可以测量俯仰角。关于俯仰角测量参数的公式,见下图。
3. 3D+4D公式总结及影响因素分析
4. MIMO和虚拟孔径
MIMO 多输入多输出技术 -> 通过增加Tx天线,来虚拟出更多的Rx天线,增加角度分辨率。
虚拟孔径: 相当于增加了虚拟天线的面积
5. 毫米波雷达系统组成
MMIC: 全称是Monolithic Microwave Integrated Circuit,即单片微波集成电路。
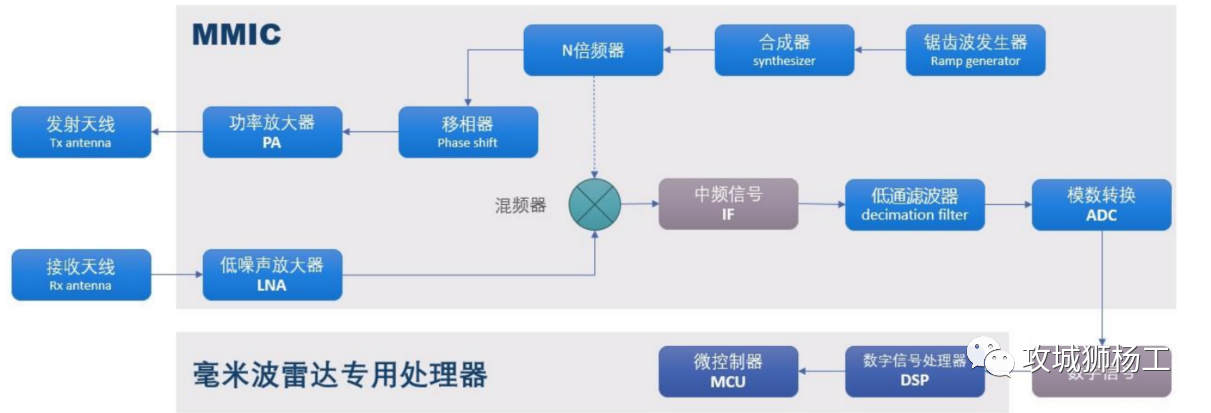

5.1 MMIC
全称是Monolithic Microwave Integrated Circuit,即单片微波集成电路。
毫米波雷达 MMIC 芯片集成了锯齿波发生器、合成器、功率放大器 PA、低噪声放大器 LNA、滤波器、模数转换器 ADC 等器件;主要作用是产生并放大、接收毫米波信号,最后将毫米波信号转化为数字信号。
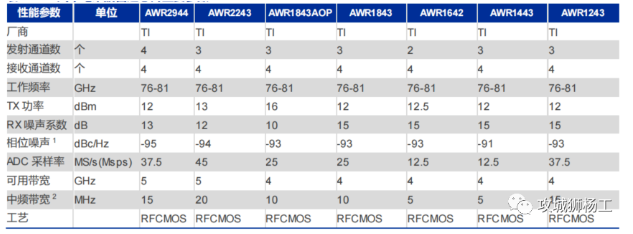
MMIC的主要供应商是英飞凌、NXP和TI。以TI为例,其主要的MMIC产品参数如下。
5.2 处理器
处理器目前主要有两种路线,即DSP和FPGA。FPGA 方案衍生于高算力验证诉求。DSP 路线的代表厂商是 TI、恩智浦,FPGA 路线代表厂商是赛灵思。当毫米波雷达从3D转为4D后,射频数字信号处理部分算力需求大大增加,导致原本用DSP的方案算力不够。这种情况下,雷达厂商为了快速进行算法验证,就会选择在FPGA芯片来进行开发,而FPGA的算力可以支持4D毫米波雷达的量产。例如德国大陆最早选用NXP芯片,算力不够转为赛灵思的FPGA。
5.3 4D毫米波路线
传统毫米波雷达已经相对成熟,我们只看4D成像毫米波雷达的技术路线。根据雷达厂商芯片选型方案,可以概括出4D成像雷达分为两条路线。
(1)多芯片级联
上面讲了MIMO技术,利用有限的天线虚拟出更多的数据通道,但虚拟的前提是有一定数量的天线。多芯片级联技术可以满足天线数量增加的需求,所谓级联,就是通过多个芯片去拼。比如TI于2018年就提供了基于AWR2243的4级联方案,就是将4片3发4收的MMIC拼在一起,这样就成了12发16收,可以虚拟出192个通道。
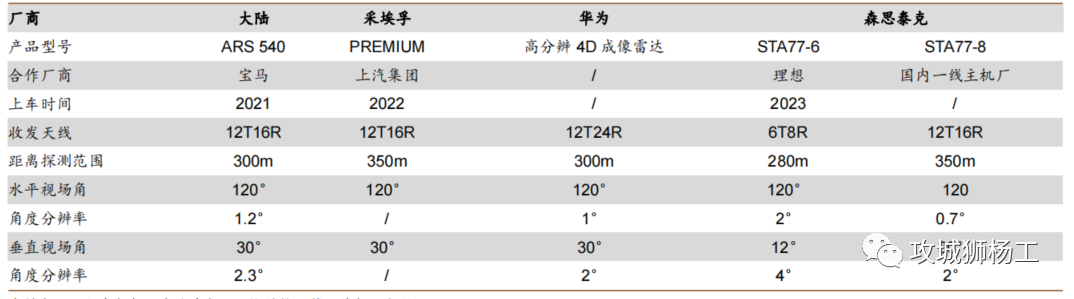
级联是目前的主流方案,大陆(4片级联)、博世(4片级联)、采埃孚(4片级联)、安波福、华为、森思泰克、德赛西威、楚航科技、华域汽车、纳瓦电子等都是采用的多芯片级联方案。采用级联方案的部分产品如下。图片来自德邦证券的报告《龙头厂商引领,4D毫米波颠覆式创新》。
多芯片级联方案优点在于前期开发难度低上市周期短,缺点在于成本偏高且量产门槛高(量产难度体现在例如“中频同步”问题导致良品率偏低)。此外还存在信噪比不够(多个MMIC芯片之间存在串扰)、算法适配等问题。
以常规的4级联方案,虚拟的通道数通常是192个,如果要继续增加,则可以使用虚拟孔径成像技术,目前做的比较好的只有傲酷。其独特的虚拟孔径成像算法可以实现在原来的物理天线数基础上再虚拟出十倍、数十倍的天线数,成功地把角分辨率从10度直接提升到1度。下图中FALCON 77GHz采用的是单芯片(3T4R)。EAGLE采用的是双芯片非级联,通过虚拟孔径成像技术可使角分辨率提高50倍。
(2)单芯片方案
根据九章智驾的文章《万字长文讲清楚4D毫米波雷达》,所谓单芯片方案,是指通过将多发多收天线以及信号处理部分集成在一颗芯片中,通过形成ASIC芯片来实现上述功能。目前,该技术的代表公司主要有Arbe、Uhnder、Vayaar、SteradianSemi、RFISee等。最典型的是Arbe公司开发的4D毫米波雷达RFIC芯片,集成了48个发射器和接收器,拥有超过2300个虚拟信道.
集成芯片可将4D毫米波雷达的体积大大缩小,并可以市场上每通道最低的成本实现了最先进的射频性能。但集成芯片方案的实现难度也要比级联方案高出许多,主要挑战如下:
1.如何在极小的密闭空间里布置那么多天线;
2.如何克服天线之间的互相干扰问题;
3.如何降低功耗、如何散热;
4.如何提升信噪比,信噪比如果上不去,有效探测距离就很短。
5.芯片方案是ASIC,一旦流片,信号处理算法就固化了。此后,算法只能改针对特定场景的个别参数配置,但不能对功能做大幅度的调整。
6. 数据处理
只简单说一下毫米波雷达主要的数据处理过程。
(1)进行1D FFT,获得距离信息;
(2)进行2D FFT,获得速度信息;
(3)CFAR目标检测:在真实环境中, 雷达信号往往伴随着大量的噪声. 雷达不仅接收来自目标的反射信号, 而且还接收来自环境和不需要的目标的反射信号. 来自这些非必要源的散射波被称为杂波。为了能够检测到真实的目标,而不会导致虚警(虚假报警),通常需要滤波。滤波有多种方法,其中比较常用的是CFAR(Constant False Alarm Rate),通过设定阈值,且这个阈值是动态可变的,低于该阈值以下的信号会被认为是虚假信号并被剔除。
(4)进行3D FFT,获得角度信息。
(5)聚类和追踪:经过3D FFT后,会得到若干个带有距离、速度和角度信息的点,需要将这些点先做聚类操作,即判断出哪些点是某一个物体的返回点云;做完聚类后,再对物体进行追踪,并判断其后续的运动轨迹。
与激光雷达点云处理过程其实也差不多,最终都是为了能够检测到具体的物体并进行跟踪,或者说传感器的最终目的都一样,只是处理的流程与算法略有不同。
Apendix-1 4D毫米波雷达总结
尽管4D成像毫米波雷达的性能相较于传统的毫米波雷达有了很大的提升,但目前来看,还是无法取代激光雷达。主要差距在于角分辨率和点云数量。
车自动驾驶需要判断40米之外的涵洞能不能通过,这时候要求垂直向角分辨率是1.4°,水平线要求在100米之外区分两个车道上的两辆车,这要求水平角分辨率是 1.7°,也就是说4D成像毫米波雷达要求水平和垂直都是 1°左右角分辨率,目前4D成像雷达刚刚达到这个水平;而前装量产的激光雷达前雷达角分辨率普遍在0.1-0.2°。速腾聚创M1每秒能够输出150万个点,禾赛AT128也是每秒153万个点,而现在4D成像毫米波雷达点云数量才几千个(楚航4D成像毫米波雷达是6000 个点云;大陆集团ARS548最大输出点云数量为800个;纵目SDR1每帧点云数512;几何伙伴4D成像毫米波雷达单帧6000个点云)。
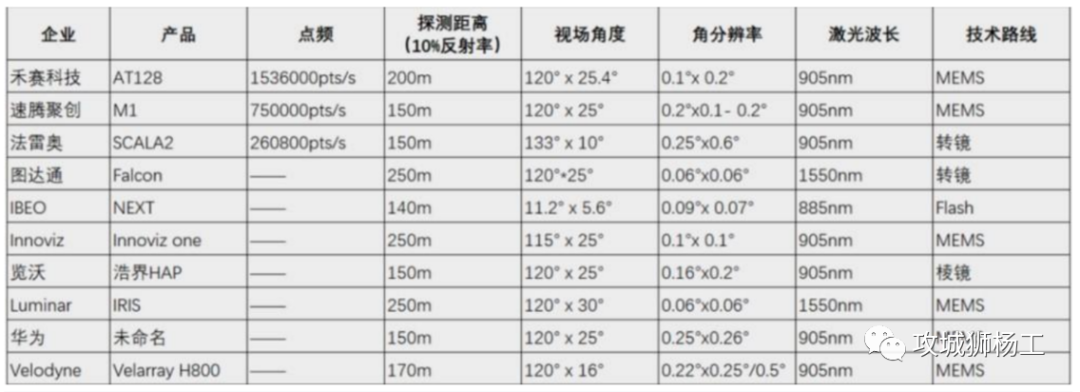
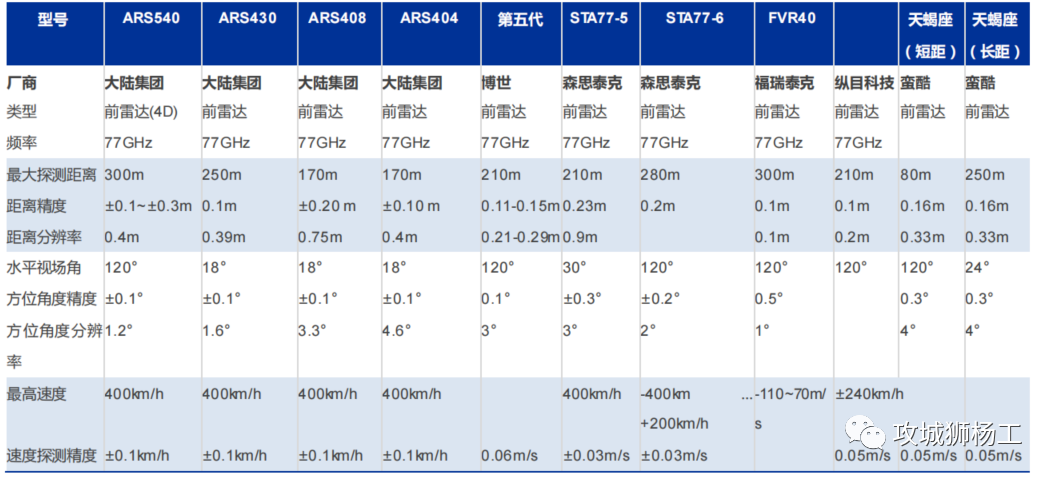
下图为主流的前装上车的激光雷达产品参数和国内外主要厂商前雷达产品性能参数(部分不是4D毫米波雷达),可以对比下两类雷达的性能。

Apendix-2 主要厂商简略
国内4D毫米波雷达供应商及近况介绍.ppt【着重资料】: https://mp.weixin.qq.com/s/GYarrc9VEZS0FafxRUeG9w
大陆的 ARS548 2020年全球首款
产品咨询:
您好,我是三一智矿科技有限公司的员工,目前在进行4D毫米波雷达的调研,在贵司官网了解到 STA77-5 这款4D毫米波雷达,官网上只有产品的基本介绍信息,是否可以提供一下使用手册等详细的产品资料?想进一步了解一下。
18611291605
songlei2ray@163.com
20家厂商推荐:
https://www.smartautoclub.com/p/48612/#
LIST
☒ 森思泰克
森思泰克2片级联4D成像雷达STA77-6量产车型——理想L7正式发布上市。
型号:STA77-5 STA77-6 STA77-8
☐ 华为
☐ 华域汽车
☐ 行易道
☐ 纵目科技
☐ 承泰科技 -
☐ 安智杰
☐ 复睿智行
☐ 威孚科技
☐ 纳瓦电子
☐ 木牛科技
☐ 几何伙伴
☐ 蛮酷科技
☐ 隼眼科技
☐ 安智汽车零部件
☐ 福瑞泰克
☐ 凌波微步
☐ 楚航科技
☐ 台湾为升科技
☐ 中科云杉
☐ 纳雷科技
☐ 华设集团
☐ 联合光电
☐ 万安科技
☐ 欧菲光
☐ 雷科防务
主要厂家
Tire 1
☐ 大陆 ARS485 慧尔视
☐ 采埃孚
☐ 博世
☐ 安波福
自驾公司
☐ Waymo
☐ Mobileye
☐ 华为
初创公司
☐ 傲酷
☒ ~~Arbe ~~
☐ 几何伙伴
☐ 楚航科技
☒ 森思泰克
☐ 纵目科技
☒ 行易道
☐ 纳瓦电子
☐ 承泰科技
☐ 安智杰
☐