torch-points3d-SiamKPConvVariants算法复现之疑难杂症
这次主要想讨论两个问题:
1、大家知道为什么torch-point3d包中没有关于change_detection(变化检测)的部分呢?我参考的链接如下:https://github.com/nicolas-chaulet/torch-points3d/tree/master?tab=readme-ov-file#developer-guidelines%E3%80%82%E5%90%84%E4%BD%8D%E5%A4%A7%E4%BD%AC%EF%BC%8C%E6%98%AF%E5%9B%A0%E4%B8%BA%E6%88%91%E6%B2%A1%E6%9C%89%E4%BA%86%E8%A7%A3%E5%88%B0%E6%9C%80%E6%96%B0%E7%9A%84%E4%BB%A3%E7%A0%81%E4%B9%88
2、我尝试复现IdeGelis Iris发布的SiameKPConv算法,来进行点云变化检测研究。参考链接如下:https://github.com/IdeGelis/torch-points3d-SiamKPConvVariants
当复现数据集Urb3DCD V1和V2时候,只提供圆柱裁剪的算法(/CD/torch-points3d-SiameseKPConv-master/torch_points3d/datasets/change_detection/Urb3DSimulPairCylinder.py)。虽然说圆柱裁剪经过多轮迭代确实能收获较好的变化检测效果,但如果我需要对全域进行变化检测,这该如何是好呢??有没有懂的大佬帮俺解答一下困扰好久的疑惑呢,感激涕零!
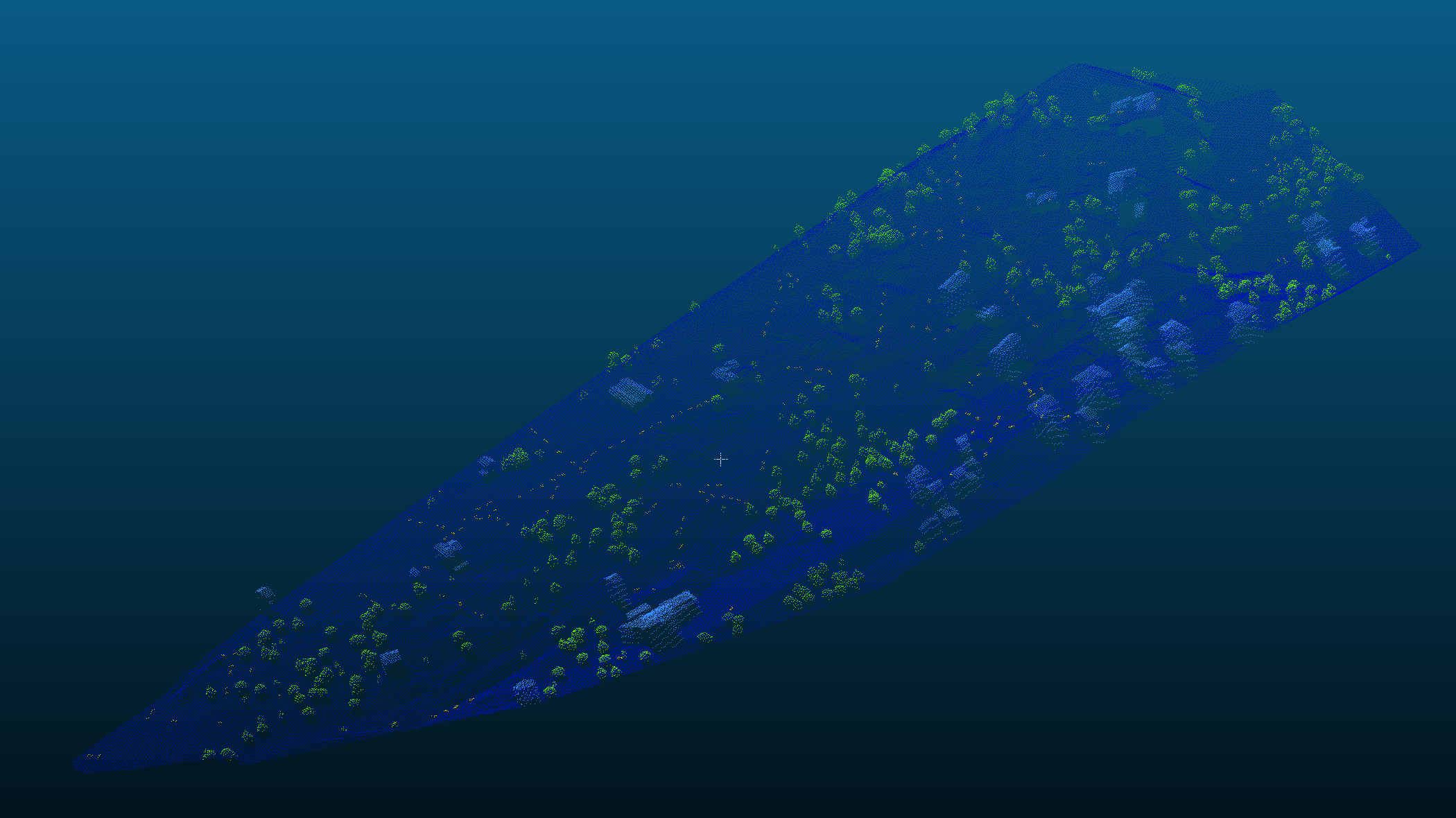
上图是原始输入点云(全域)
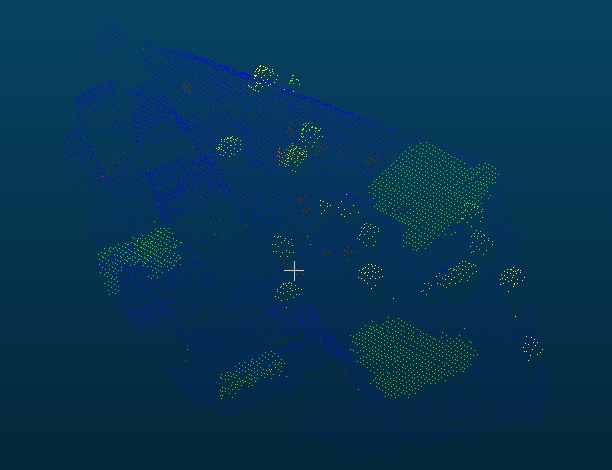
下图是经过半径100m圆柱裁剪之后的输出点云(部分)