【android bluetooth 协议分析 02】【bluetooth hal 层详解 7】【高通蓝牙hal-读流程介绍】
1. 问题
今天遇到一个 hal 进程 被干掉的问题。 接这个机会我来梳理一下, 高通的hal 侧,在读到 串口数据后,是如何上报给 bt.server 的。
先来看一下这个问题日志:
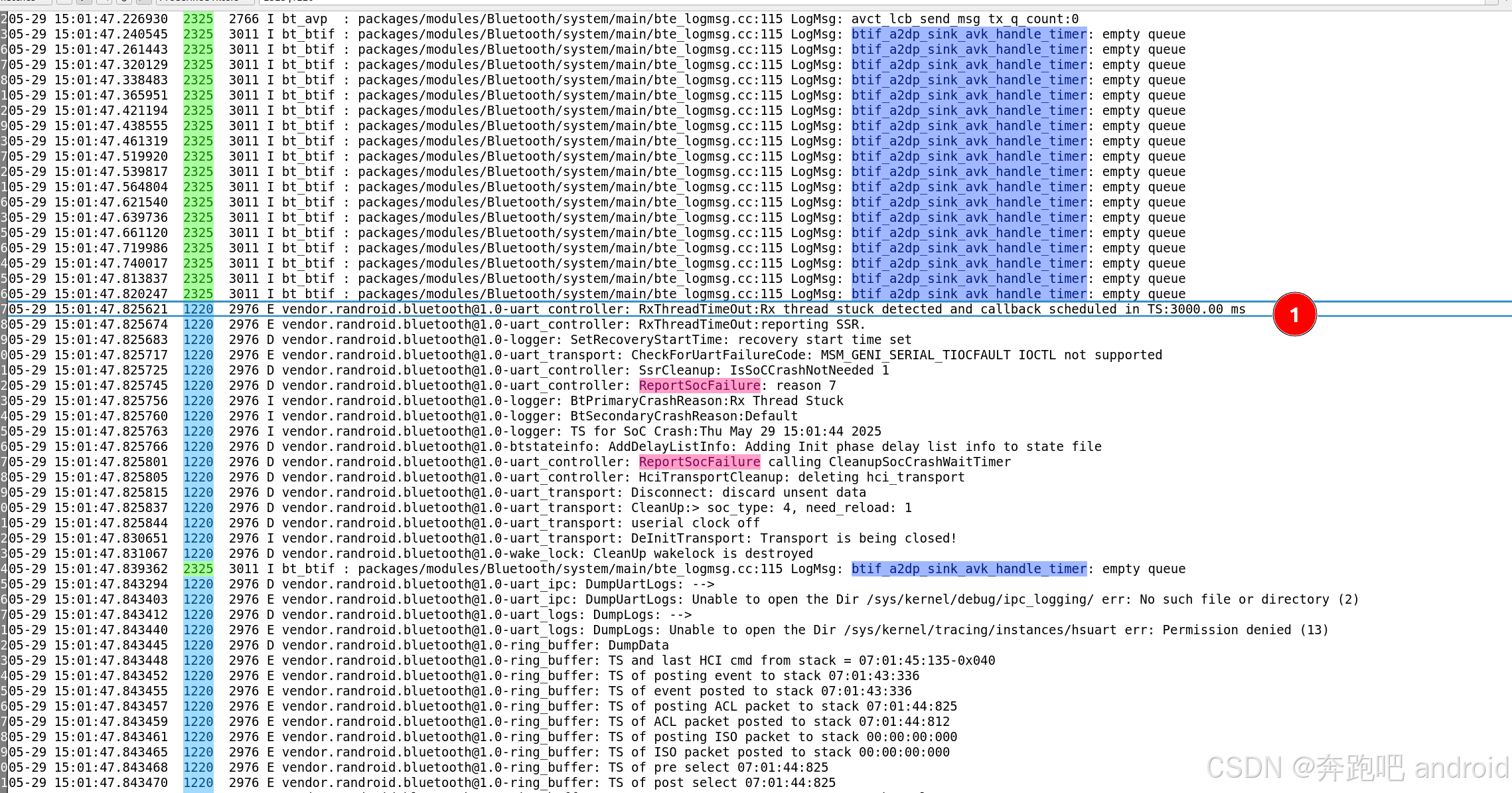
05-29 15:01:47.825621 1220 2976 E vendor.randroid.bluetooth@1.0-uart_controller: RxThreadTimeOut:Rx thread stuck detected and callback scheduled in TS:3000.00 ms05-29 15:01:47.825674 1220 2976 E vendor.randroid.bluetooth@1.0-uart_controller: RxThreadTimeOut:reporting SSR.
高通的 hal 里面 报了 Rx thread stuck detected and callback scheduled in TS:3000.00 ms 错误。
// hidl_hci/1.0/default/uart_controller.cpp
void UartController::RxThreadTimeOut(union sigval sig)
{{std::unique_lock<std::mutex> guard(rx_thread_state_mutex_);UartController *uart_controller = static_cast<UartController*>(sig.sival_ptr);uart_controller->rx_timer_state_machine_.timer_state = TIMER_OVERFLOW;RxTimerSchedTs = std::chrono::steady_clock::now();ALOGE("%s:Rx thread stuck detected and callback scheduled in TS:%0.2lf ms",__func__, uart_controller->GetRxThreadSchedTSDiff());}{std::unique_lock<std::mutex> guard(rx_thread_timer_mutex_);UartController *uart_controller = static_cast<UartController*>(sig.sival_ptr);if (uart_controller->GetRxThreadTimerState() != TIMER_OVERFLOW) {ALOGI("%s: Rx thread is unblocked resuming back", __func__);return;}ALOGE("%s:reporting SSR.", __func__);uart_controller->SsrCleanup(BT_HOST_REASON_RX_THREAD_STUCK);}
}
- 从函数中可以看到是 定时器超时导致的。
看到这里 请思考如下几个问题?
- 当前定时器 是干什么的?
- 超时时间多少?
- 报这个错意味着什么?
- 这里先剧透一下,这个定时器和 hal 从uart 中读出数据,上报链路 有关。那hal 是如何从 /dev/ttyHS0 中读出数据,上报给 bt.server 的呢?
2 RxThreadTime定时器
1. 启动定时器
// hidl_hci/1.0/default/uart_controller.cpp#define RX_THREAD_USAGE_TIMEOUT (3000)void UartController::StartRxThreadTimer()
{int status;struct itimerspec ts;struct sigevent se;ALOGV("%s", __func__);if (GetRxThreadTimerState() == TIMER_NOT_CREATED) {// 1. 设置 超时函数se.sigev_notify_function = (void (*)(union sigval))RxThreadTimeOut;se.sigev_notify = SIGEV_THREAD;se.sigev_value.sival_ptr = this;se.sigev_notify_attributes = NULL;// 2. 创建 定时器status = timer_create(CLOCK_MONOTONIC, &se, &rx_timer_state_machine_.timer_id);if (status == 0)SetRxThreadTimerState(TIMER_CREATED);}if ((GetRxThreadTimerState() == TIMER_CREATED) ||(GetRxThreadTimerState() == TIMER_OVERFLOW)) {// 3. 设置定时时间为 3srx_timer_state_machine_.timeout_ms = RX_THREAD_USAGE_TIMEOUT; // 3s ts.it_value.tv_sec = rx_timer_state_machine_.timeout_ms / 1000;ts.it_value.tv_nsec = 1000000 * (rx_timer_state_machine_.timeout_ms % 1000);ts.it_interval.tv_sec = 0;ts.it_interval.tv_nsec = 0;// 4. 3s 后触发 超时函数status = timer_settime(rx_timer_state_machine_.timer_id, 0, &ts, 0);if (status == -1)ALOGE("%s:Failed to set RxThread Usage timer", __func__);elseSetRxThreadTimerState(TIMER_ACTIVE);}RxTimerStartTs = std::chrono::steady_clock::now();
}
- UartController::StartRxThreadTimer 函数 创建了一个定时器 ,并在 3s 后触发 超时函数:RxThreadTimeOut
2. 超时处理
// hidl_hci/1.0/default/uart_controller.cpp
void UartController::RxThreadTimeOut(union sigval sig)
{{std::unique_lock<std::mutex> guard(rx_thread_state_mutex_);UartController *uart_controller = static_cast<UartController*>(sig.sival_ptr);uart_controller->rx_timer_state_machine_.timer_state = TIMER_OVERFLOW;RxTimerSchedTs = std::chrono::steady_clock::now();ALOGE("%s:Rx thread stuck detected and callback scheduled in TS:%0.2lf ms",__func__, uart_controller->GetRxThreadSchedTSDiff());}{std::unique_lock<std::mutex> guard(rx_thread_timer_mutex_);UartController *uart_controller = static_cast<UartController*>(sig.sival_ptr);if (uart_controller->GetRxThreadTimerState() != TIMER_OVERFLOW) {ALOGI("%s: Rx thread is unblocked resuming back", __func__);return;}ALOGE("%s:reporting SSR.", __func__);uart_controller->SsrCleanup(BT_HOST_REASON_RX_THREAD_STUCK);}
}
3. 停止超时
// hidl_hci/1.0/default/uart_controller.cppvoid UartController::StopRxThreadTimer()
{int status;struct itimerspec ts;if (GetRxThreadTimerState() != TIMER_NOT_CREATED) {ts.it_value.tv_sec = 0;ts.it_value.tv_nsec = 0;ts.it_interval.tv_sec = 0;ts.it_interval.tv_nsec = 0;status = timer_settime(rx_timer_state_machine_.timer_id, 0, &ts, 0);if(status == -1) {ALOGE("%s:Failed to stop Rx thread timer",__func__);return;}ALOGV("%s: Rx thread timer Stopped",__func__);SetRxThreadTimerState(TIMER_CREATED);}
}
4. 实际使用定时器
hal 进程每次 从 /dev/ttyHSx 读到数据后,就会回调 DataHandler::InternalOnPacketReady 函数。 为啥会回调这里, 在本篇,其他小结阐述。
// hidl_hci/1.0/default/data_handler.cpp
void DataHandler::InternalOnPacketReady(ProtocolType ptype, HciPacketType type,const hidl_vec<uint8_t>*hidl_data, bool from_soc) {UNUSED(from_soc);uint16_t len = hidl_data->size();const uint8_t* data = hidl_data->data();ProtocolCallbacksType *cb_data = nullptr;static bool reset_rxthread_stuck_prop = true;std::map<ProtocolType, ProtocolCallbacksType *>::iterator it;// update the pending Init cb and other callbacksit = protocol_info_.find(ptype); if (it != protocol_info_.end()) {cb_data = (ProtocolCallbacksType*)it->second; // 根据 ptype 从 protocol_info_ 找到对应的回调} else {ALOGE("%s: Didnt get the callbacks", __func__);}// execute callbacks hereif (cb_data != nullptr && controller_ != nullptr) {if (!cb_data->is_pending_init_cb ) {if (!diag_interface_.isSsrTriggered() ||!((UartController *)controller_)->IsBqrRieEnabled()) {// 1. 启动 定时器controller_->StartRxThreadTimer();}// 2. 将 从串口读取到的 数据通过 data_read_cb 回调 传递给 bt.servercb_data->data_read_cb(type, hidl_data);// 3. 停止 定时器controller_->StopRxThreadTimer();}...}
1. data_read_cb 调用的是谁
这里 我们 先来看一下 cb_data->data_read_cb(type, hidl_data); 这个回调是在哪里:
void DataHandler::InternalOnPacketReady(ProtocolType ptype, HciPacketType type,const hidl_vec<uint8_t>*hidl_data, bool from_soc) {// update the pending Init cb and other callbacksit = protocol_info_.find(ptype); // 这里的 ptype == TYPE_BTif (it != protocol_info_.end()) {cb_data = (ProtocolCallbacksType*)it->second; // 根据 ptype 从 protocol_info_ 找到对应的回调} else {ALOGE("%s: Didnt get the callbacks", __func__);}
下面是 cb_data->data_read_cb(type, hidl_data);
- data_read_cb 的 初始化流程
// hidl_hci/1.0/default/bluetooth_hci.cppReturn<void> BluetoothHci::initialize(const ::android::sp<IBluetoothHciCallbacks>& cb /*这个回调是 bt.server 传递下来的.*/)
{bool rc = false;ALOGW("BluetoothHci::initialize(), slot%d", hw_slot_);if (cb == nullptr) {ALOGE("%s: Received NULL callback from BT client", __func__);return Void();}::android::sp<IBluetoothHciCallbacks> event_cb_tmp;event_cb_tmp = cb;rc = DataHandler::Init( TYPE_BT, .A. , .B.); // 这里的 .B. 的内容就是 data_read_cb...}// hidl_hci/1.0/default/data_handler.cppbool DataHandler::Init(ProtocolType type, InitializeCallback init_cb,DataReadCallback data_read_cb)
{return data_handler->Open(type, init_cb, data_read_cb /*关注这里*/);
}bool DataHandler::Open(ProtocolType type, InitializeCallback init_cb,DataReadCallback data_read_cb /*关注这里*/)
{...it = protocol_info_.find(type);if (it == protocol_info_.end()) {ProtocolCallbacksType *cb_data = new (ProtocolCallbacksType);cb_data->type = type;cb_data->is_pending_init_cb = true;cb_data->init_cb = init_cb;cb_data->data_read_cb = data_read_cb; // 主要关注这里的 赋值protocol_info_[type] = cb_data;}...
}// 此时我们在来看这段函数 此时是不是就能清楚的看到 cb_data->data_read_cb(type, hidl_data); 调用的是谁了。
// hidl_hci/1.0/default/data_handler.cpp
void DataHandler::InternalOnPacketReady(ProtocolType ptype, HciPacketType type,const hidl_vec<uint8_t>*hidl_data, bool from_soc) {UNUSED(from_soc);uint16_t len = hidl_data->size();const uint8_t* data = hidl_data->data();ProtocolCallbacksType *cb_data = nullptr;static bool reset_rxthread_stuck_prop = true;std::map<ProtocolType, ProtocolCallbacksType *>::iterator it;// update the pending Init cb and other callbacksit = protocol_info_.find(ptype); if (it != protocol_info_.end()) {cb_data = (ProtocolCallbacksType*)it->second; // 根据 ptype 从 protocol_info_ 找到对应的回调} else {ALOGE("%s: Didnt get the callbacks", __func__);}// execute callbacks hereif (cb_data != nullptr && controller_ != nullptr) {if (!cb_data->is_pending_init_cb ) {if (!diag_interface_.isSsrTriggered() ||!((UartController *)controller_)->IsBqrRieEnabled()) {// 1. 启动 定时器controller_->StartRxThreadTimer();}// 2. 将 从串口读取到的 数据通过 data_read_cb 回调 传递给 bt.servercb_data->data_read_cb(type, hidl_data);// 3. 停止 定时器controller_->StopRxThreadTimer();}...}
BluetoothHci::initialize 函数是什么时候触发调用的请 参照 :
- 【android bluetooth 协议分析 02】【bluetooth hal 层详解 3】【高通蓝牙hal主要流程介绍-上】
我将 .B. 单独摘出来了。 cb_data->data_read_cb(type, hidl_data); 将回调到这里
[this, event_cb_tmp](HciPacketType type, const hidl_vec<uint8_t> *packet) {DataHandler *data_handler = DataHandler::Get();if (event_cb_tmp == nullptr) {ALOGE("BluetoothHci: event_cb_tmp is null");if (data_handler)data_handler->SetClientStatus(false, TYPE_BT);return;}/* Skip calling client callback when client is dead */if(data_handler && (data_handler->GetClientStatus(TYPE_BT) == false)) {ALOGI("%s: Skip calling client callback when client is dead", __func__);return;}Logger::Get()->UpdateRxTimeStamp();switch (type) {case HCI_PACKET_TYPE_EVENT: // 如果是 hci event 事件{auto hidl_client_status = event_cb_tmp->hciEventReceived(*packet); // 将通过回到 bt.server 的回调函数传递给协议栈if(!hidl_client_status.isOk()) {ALOGE("Client dead, callback hciEventReceived failed");if (data_handler)data_handler->SetClientStatus(false, TYPE_BT);}}break;case HCI_PACKET_TYPE_ACL_DATA: // 如果是 acl 数据{auto hidl_client_status = event_cb_tmp->aclDataReceived(*packet); // 将通过回到 bt.server 的回调函数传递给协议栈if(!hidl_client_status.isOk()) {ALOGE("Client dead, callback aclDataReceived failed");if (data_handler)data_handler->SetClientStatus(false, TYPE_BT);}}break;default:ALOGE("%s Unexpected event type %d", __func__, type);break;}}
5. 小结
当每次 从 /dev/ttyHSx 中读到 串口上的数据时,最终会回调到 DataHandler::InternalOnPacketReady 函数中:
- 在向 bt.server 传递 hci.event 、acl , 数据时, 会 先定一个 3 s 的定时器。
- 在向 bt.server 回调 数据。当bt.server 处理完成后, 返回。
- 此时 取消之前的定时器。
从这个过程可以清楚的看到, RxThreadTime 定时器就是为了保证 hal -> bt.server 链路,始终处于正常运转的。 如果超时证明当前链路出现问题。 有可能协议栈 没有计时处理。 此时 hal 定时器超时, 杀死 hal 进程。
3. hal 如何从串口读数据并回调
现在 还有一个问题就是 如何从 /dev/ttyHSx 读到数据, 最终为何会回调到 DataHandler::InternalOnPacketReady 函数? 这也是本篇 另外一个重要的议题。
1. 相关函数讲解
1. DataHandler::Open
bool DataHandler::Open(ProtocolType type, InitializeCallback init_cb,DataReadCallback data_read_cb)
{
...if (controller_) {int retry_count = 0;while (retry_count < INIT_MAX_RETRY_TIMES) {// 在调用 controller_->Init 中传入了一个回调函数 ,这个回调函数中 调用了 DataHandler::OnPacketReadystatus = controller_->Init([this](ProtocolType ptype, HciPacketType type,const hidl_vec<uint8_t> *hidl_data) {OnPacketReady(ptype, type, hidl_data);});if (status)break;++retry_count;}}...}// 每次调用 DataHandler::OnPacketReady 就会触发 InternalOnPacketReady 调用void DataHandler::OnPacketReady(ProtocolType ptype, HciPacketType type,const hidl_vec<uint8_t>*hidl_data, bool from_soc)
{
...InternalOnPacketReady(ptype, type, hidl_data, from_soc);return;
}2. UartController::Init
status = controller_->Init([this](ProtocolType ptype, HciPacketType type,const hidl_vec<uint8_t> *hidl_data) {OnPacketReady(ptype, type, hidl_data);});
bool UartController::Init(PacketReadCallback pkt_read_cb){
...ALOGI("soc need reload patch = %d", soc_need_reload_patch);read_cb_ = pkt_read_cb; // 会将 回调注册到 UartController::read_cb_ 中...
}那这里的 read_cb_ 是在哪里回调的?
void UartController::OnPacketReady(hidl_vec<uint8_t> *data)
{
...if (read_cb_) {read_cb_(GetProtocol(hci_packet_type_), hci_packet_type_, data);}...
}
3. UartController::UartController
那谁来回调 UartController::OnPacketReady
在UartController 构造函数里面,我们将 UartController::OnPacketReady 传递给了 HciPacketizer 对象
HciPacketizer hci_packetizer_;UartController::UartController(BluetoothSocType soc_type): soc_crashed(false), soc_type_(soc_type),hci_packetizer_([this](hidl_vec<uint8_t> *data) { OnPacketReady(data); })
{}4. HciPacketizer
class HciPacketizer {public:HciPacketizer(_HciPacketReadyCallback packet_cb): _packet_ready_cb_(packet_cb){ HciPacketReadyCallback_flag = 1; };
在 HciPacketizer 构造中,将 UartController::OnPacketReady 保存到了 _packet_ready_cb_ 变量中
那 _packet_ready_cb_ 在哪里回调
void HciPacketizer::OnDataReady(int fd, HciPacketType packet_type)
{switch (state_) {case HCI_PAYLOAD:if (HciPacketReadyCallback_flag){// 从 /dev/ttyHSx 中读出数据ssize_t bytes_read = TEMP_FAILURE_RETRY(read(fd, packet_new_->data() + GetPreambleSizeForType(packet_type)+ bytes_read_, bytes_remaining_));retry_read_ = 0;bytes_remaining_ -= bytes_read;bytes_read_ += bytes_read;if (bytes_remaining_ == 0) {_packet_ready_cb_(packet_new_); // 回调 注册的函数state_ = HCI_PREAMBLE;bytes_read_ = 0;}break;} else {ssize_t bytes_read = TEMP_FAILURE_RETRY(read(fd, packet_.data() + GetPreambleSizeForType(packet_type) + bytes_read_,bytes_remaining_));if (bytes_read == 0) {// This is only expected if the UART got closed when shutting down.ALOGE("%s: Unexpected EOF reading the payload!", __func__);sleep(5); // Expect to be shut down within 5 seconds.return;}if (bytes_read < 0) {LOG_ALWAYS_FATAL("%s: Read payload error: %s", __func__,strerror(errno));}bytes_remaining_ -= bytes_read;bytes_read_ += bytes_read;if (bytes_remaining_ == 0) {packet_ready_cb_();state_ = HCI_PREAMBLE;bytes_read_ = 0;}break;}}
}
HciPacketizer::OnDataReady 在哪里回调的?
5. UartController::OnDataReady
void UartController::OnDataReady(int fd)
{...hci_packetizer_.OnDataReady(fd, hci_packet_type_);...
}
6. UartController::Init
bool UartController::Init(PacketReadCallback pkt_read_cb)
{
...// set up the fd watcher nowret = fd_watcher_.WatchFdForNonBlockingReads(uart_transport->GetCtrlFd(),[this](int fd) { OnDataReady(fd); });...}
7. AsyncFdWatcher::WatchFdForNonBlockingReads
int AsyncFdWatcher::WatchFdForNonBlockingReads(int file_descriptor /*这里传入的就是 /dev/ttyHSx , 对应我们的串口 fd */, const ReadCallback& on_read_fd_ready_callback)
{// Add file descriptor and callback{std::unique_lock<std::mutex> guard(internal_mutex_);watched_fds_[file_descriptor] = on_read_fd_ready_callback; // 将 UartController::OnDataReady 注册到这里}// Start the thread if not started yetreturn TryStartThread(); // 这里启动了 一个线程
}int AsyncFdWatcher::TryStartThread()
{if (std::atomic_exchange(&running_, true)) return 0;// Set up the communication channelint pipe_fds[2];if (pipe2(pipe_fds, O_NONBLOCK)) return -1;notification_listen_fd_ = pipe_fds[0];notification_write_fd_ = pipe_fds[1];thread_ = std::thread([this]() { ThreadRoutine(); }); // 启动线程if (!thread_.joinable()) return -1;return 0;
}
8. AsyncFdWatcher::ThreadRoutine
// hidl_hci/1.0/default/async_fd_watcher.cpp
void AsyncFdWatcher::ThreadRoutine()
{while (running_) {fd_set read_fds;FD_ZERO(&read_fds);FD_SET(notification_listen_fd_, &read_fds);int max_read_fd = INVALID_FD;// watched_fds_ 中有 我们打开的 串口 fdfor (auto& it : watched_fds_) {FD_SET(it.first, &read_fds); // 将 /dev/ttyHSx 对应的fd 加入到 read_fdsmax_read_fd = std::max(max_read_fd, it.first);}struct timeval timeout;struct timeval* timeout_ptr = NULL;if (timeout_ms_ > std::chrono::milliseconds(0)) {timeout.tv_sec = timeout_ms_.count() / 1000;timeout.tv_usec = (timeout_ms_.count() % 1000) * 1000;timeout_ptr = &timeout;}// Wait until there is data available to read on some FD.int nfds = std::max(notification_listen_fd_, max_read_fd);// 当 串口有数据,或者超时后,select就返回 /*int select(int nfds, fd_set *readfds, fd_set *writefds,fd_set *exceptfds, struct timeval *timeout);*/int retval = select(nfds + 1, &read_fds/*这里只监听,可读*/, NULL, NULL, timeout_ptr);// There was some error.if (retval < 0) continue;// Timeout.if (retval == 0) {// 暂时忽略超时 处理}// Read data from the notification FD.if (FD_ISSET(notification_listen_fd_, &read_fds)) {char buffer[] = { 0 };TEMP_FAILURE_RETRY(read(notification_listen_fd_, buffer, 1));continue;}// Invoke the data ready callbacks if appropriate.std::vector<decltype(watched_fds_) ::value_type> saved_callbacks;{std::unique_lock<std::mutex> guard(internal_mutex_);for (auto& it : watched_fds_) {// 遍历 注册进入 watched_fds_ 中的fd, 找到可读的if (FD_ISSET(it.first, &read_fds)) {// 假如此时找到了 /dev/ttyHSx 可读, 此时将 UartController::OnDataReady 回调加入到 saved_callbacks 中。saved_callbacks.push_back(it);}}}for (auto& it : saved_callbacks) {if (it.second) {it.second(it.first); // 这里挨个调用 加入到 saved_callbacks 中的回调,此时 就会回调 UartController::OnDataReady}}}ALOGE("%s: End of AsyncFdWatcher::ThreadRoutine", __func__);
}
2. 回调路径总结
DataHandler::Open()controller_->Init(携带 DataHandler::OnPacketReady 回调 )启动 AsyncFdWatcher::ThreadRoutine 监听 /dev/ttyHSx 是否可读UartController::OnPacketReady 的回调会触发 DataHandler::OnPacketReady 回调在 UartController 构造中,将 UartController::OnPacketReady 传入 HciPacketizer 中最终 在 HciPacketizer::OnDataReady 中会触发 UartController::OnPacketReady 回调UartController::OnDataReady 会触发 HciPacketizer::OnDataReadyAsyncFdWatcher::ThreadRoutine 中监听 /dev/ttyHSx fd,如果可读,此时会回调 UartController::OnDataReady
所以当 AsyncFdWatcher::ThreadRoutine 监听到 /dev/ttyHSx 有数据可读:
-> UartController::OnDataReady -> HciPacketizer::OnDataReady -> UartController::OnPacketReady -> DataHandler::OnPacketReady -> DataHandler::InternalOnPacketReady
希望你没有学废, 反正我已经废了。 欢迎评论。一起进步!!!