精度分析方法-不确定度
目标
:分析一个测量模型中,被测量值的不确定程度。
定义:
它表示由于测量过程中的各种因素,如仪器精度、环境条件、操作人员等因素的影响,使得测量结果存在一个范围,这个范围就是不确定度。
流程:
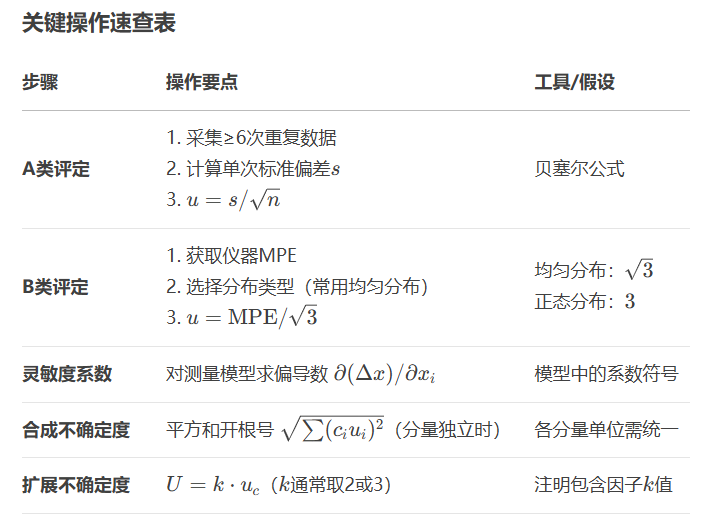
1、误差评定方法有两种方式
1)A类评定:多次测量取平均(计算标准偏差(贝塞尔公式),然后除以根号次数(多次测取平均)。当然也可以使用时只是单次测量,只用标准偏差就可以)
2)B类评定:知道仪器的误差范围(最大误差除以根号3(均匀分布)或者3(正态分布))
2、误差组合
多个误差组合在一起形成总误差。平方和开根号(灵敏度系数x误差)。
3、扩展不确定度
上面求出的不确定度(大约68%置信水平)
为了获得(95%置信水平),所以乘以2
案例:
评定步骤分解:
建立测量模型 (C.1.1):
公式: Δx = M_x - S_x + δc + δm
含义: 定位仪的示值误差 Δx 由4部分组成:
M_x:定位仪自己显示/输出的x方向测量值(就是我们记录的那10个数据)。
S_x:标准器给出的“真值”。这里是用GPS和钢卷尺组合测量换算出来的位置值(被认为是更准确的值)。
δc:由于水中声速测量不准确带来的偏差。声速不准会影响声波传播时间,进而影响定位仪计算的距离。
δm:多维运行控制机构(用来移动信标或换能器的机械装置)在水平或垂直转动时自身不精确引入的偏差。
为什么重要? 这个模型列出了所有影响最终误差 Δx 的主要因素。不确定度评定就是要评估这些因素各自带来的“不可靠程度”(不确定度分量),然后合成起来。
确定合成灵敏度系数 (C.1.2):
公式: u_c²(Δx) = c₁²u²(M_x) + c₂²u²(S_x) + c₃²u²(δc) + c₄²u²(δm) (公式2)
含义: 要计算总的不确定度(合成方差 u_c²(Δx)),需要知道:
u(M_x), u(S_x), u(δc), u(δm)&