自驾总结_Routing
综述:
根据规划请求完成P2P的车道级导航,并且实现路由切片与车道中心参考线下发,能够完成L2~L4自动驾驶场景下的导航规划工作,支持3D场景下的导航,能够支持感知与高精度地图元素的融合。
总体结构与功能:
Routing全局路径规划,即全局导航模块,(假设保留HDmap,当然现在更多是SDmap,或者点云地图--->OpenDrive地图)
-
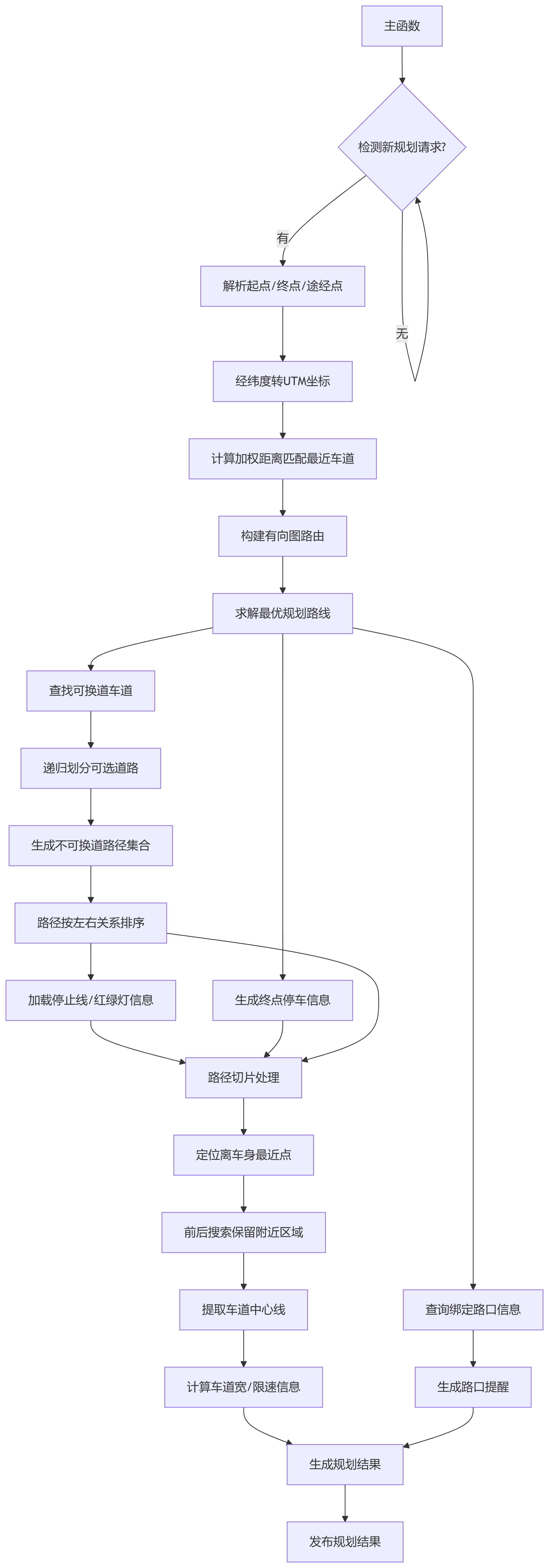
请求检测与初始化 (
A→B→C)-
主函数循环检测新规划请求
-
解析请求中的起点、终点和途经点
-
-
坐标转换与车道匹配 (
C→D→E)-
将经纬度坐标转换为UTM坐标系统
-
根据坐标和朝向角计算加权距离
-
匹配到最近的车道中心线
-
-
路由规划 (
E→F→G)-
在车道网络有向图中构建路由
-
使用路径搜索算法(如A*或Dijkstra)
-
求解代价最小的最优路线
-
-
驾驶辅助功能 (
G→H→I和G→O)-
查询路线经过的路口信息
-
生成路口提醒数据
-
创建终点停车信息(位置和姿态)
-
-
车道级路径处理 (
G→J→K→L→M→N)-
查找可换道车道(左右相邻关系)
-
递归划分可选道路
-
将道路划分为不可换道的路径段
-
按左右关系排序路径
-
加载停止线和绑定红绿灯信息
-
-
实时路径优化 (
N+O→P→Q→R)-
结合车辆实时位置进行路径切片
-
定位离车身最近点
-
前后搜索保留附近区域(如前后各100米)
-
-
参考线生成 (
R→S→T→U)-
提取车道中心线作为参考线
-
计算左右车道宽度
-
获取车道限速信息
-
整合所有数据生成规划结果
-
-
结果输出 (
U→V)-
发布包含以下信息的规划结果:
-
参考线点序列
-
车道宽度和限速
-
路口提醒
-
红绿灯信息
-
停车点信息
-
-
总结:坐标转换(输入:UTM坐标起点,终点,途径点,处理:有向图搜索(Dijistra,A*)输出:车道ID序列最优路线)-->车道匹配-->路径规划-->车道扩展(输入:最优路线车道序列,处理:递归查找左右相邻车道,输出:排序后可选路径集合)-->路径切片(输入:完整路径集合+车辆实时位置,处理:最近点搜索+窗口截取 输出:局部区域路径段)-->参考线生成(输入:切片后车道ID序列,处理:车道属性+几何计算,输出:带属性参考线点列)
路径规划
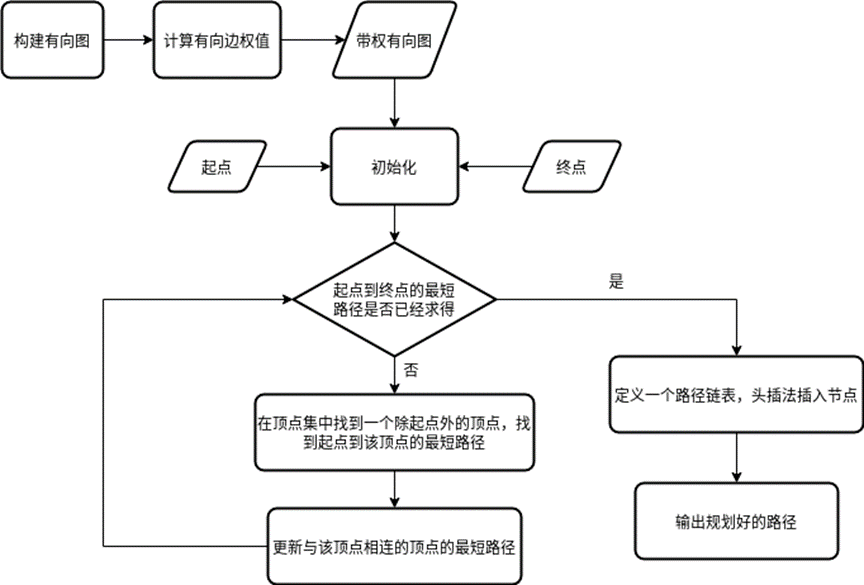
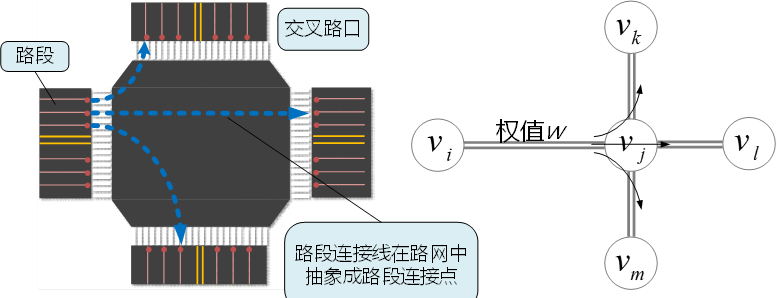
有向图概念:
1)构建有向图:以lanelet作为基本单位,转化为图G的一条有向边两条边之间添加一个顶点。
2)计算有向边权值:综合考虑lanelet的属性(如限速情况、红绿灯时长、路径长度、以及车道宽度等等因素),估算出一个表示车辆通过该lanelet所需的时长,并把该时长作为lanelet对应的边的权值。每个lanelet属性用a1表示,使用F(a1,a2,a3...,an)权值估计函数为每个lanelet计算一个唯一权值w。此外,实时交通信息表如果显示某条lanelet不通,我们可以将其设置为不连通。
比如 w = t = t1(lanlet内红灯时间)+ s/min(v,vl) (v代表平均车速,vl表示限速的速度)
Dijisktra算法:
[最短路径问题]Dijkstra算法(含还原具体路径) - MarisaMagic - 博客园
路由图构建:
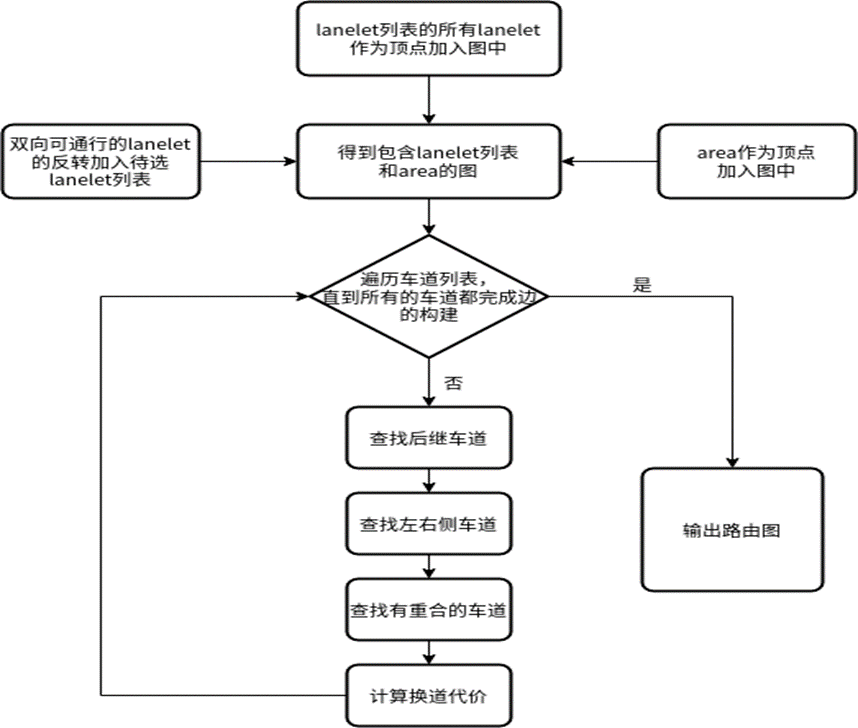
- 若有双向可通行的lanelet,把该lanelet的反转(inverse)加入待选lanelet列表里。
- 将lanelet列表里的所有lanelet作为顶点加入图中,并把lanelet的起始和末尾点加入索引。
- 把area作为顶点加入图中。
- 对于每一个lanelet,进行以下操作:A) 查找后继lanelet,对所有的后继节点和本节点之间,都构建一条边,权值为本lanelet的周长/限速=travel time;B)查找左右侧车道,并加入,能换道则加入换道候选(换道产生的代价在后续处理),cost置1;C)查找有重合的车道,并加入,cost置1;D)对换道的代价进行计算;
- 开始构建图的边(lanelets和areas),area的构建比较简单,和lanelet的后继权值计算方法类似,也是拿周长算一个travel time 。
cost计算
计算换道的代价,声明,这里的代价是在本车道换道后,对于本车道的前后车道带来的代价变化,本车道A,左车道B,前车道C,后车道D,可以理解为原来C->A->D的代价分别是C的travel time,A的travel time ,D的travel time 。(权值为本lanelet的周长/限速=travel time)换道的代价就是C->A->B->D。分别为C的travel time ,(A的travel time+B的travel time)/2,D的travel time。
切片算法:
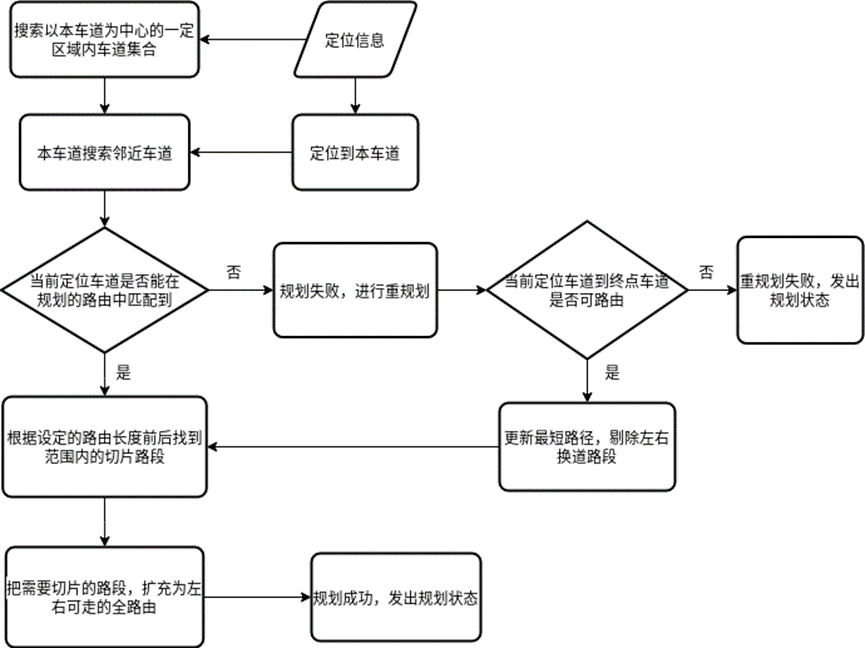
- 根据定位信息定位到本车道,搜索以本车道为中心的一定区域内车道集合,并搜索本车道邻近车道。
- 判断当前定位的车道是否能在规划的路由中匹配到(即本车道或者邻近车道是否在规划的路由中),不能则进行重规划,能则进行步骤4。
- 判断当前定位车道到终点车道是否可以路由,不能则重规划失败,发出规划失败的状态,可以路由则更新最优规划路径。
- 根据设定的路由长度前后找到在范围内的切片路段。
- 把需要切片的路段扩充为左右可走的全路由,发出规划成功状态。
局部拓扑算法:
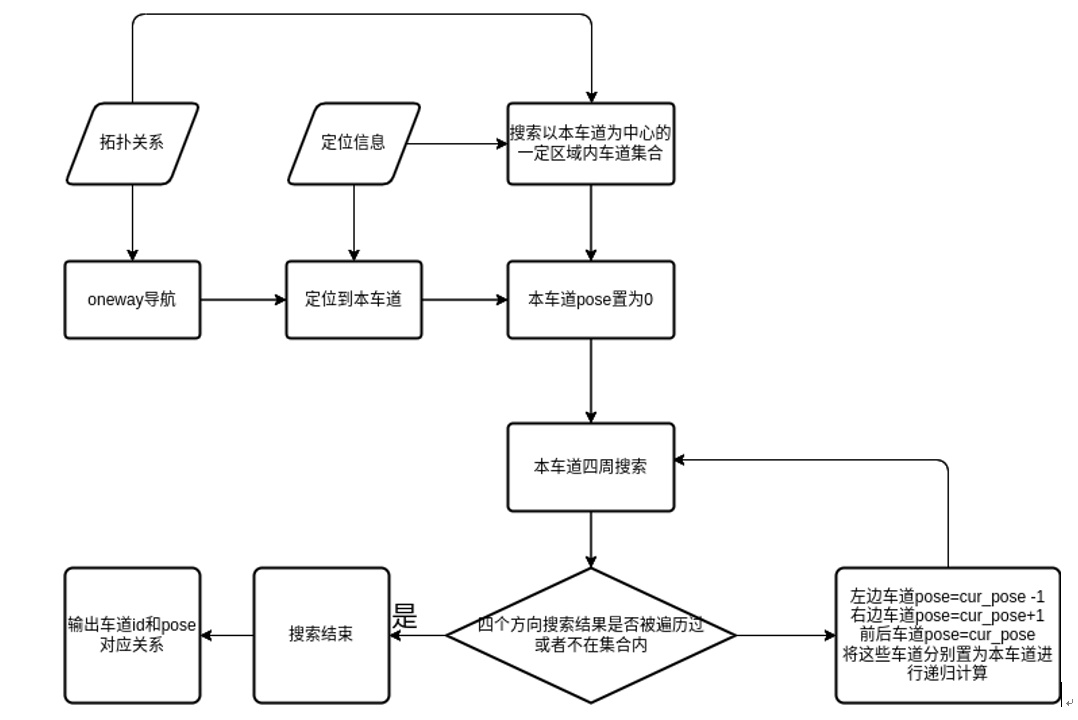
- 根据定位信息定位到本车道,搜索以本车道为中心的一定区域内车道集合。
- 本车道的pose值置为0,并搜索四周车道。
- 循环以下步骤,直到四个方向搜索结果都被遍历过或者不在集合内:A)左边车道pose值为本车道pose值减一;B)右边车道pose值为本车道pose值加一;C)前后车道pose值与本车道相同;D)将这些车道分别置为本车道进入步骤2进行递归计算;
- 搜索结束,输出车道id和pose的对应关系。
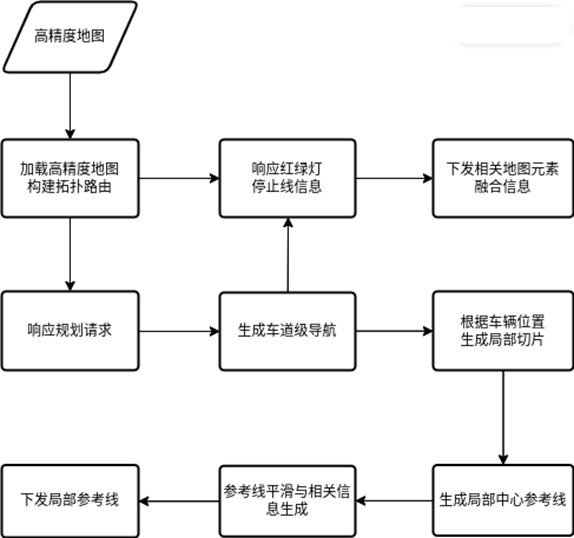
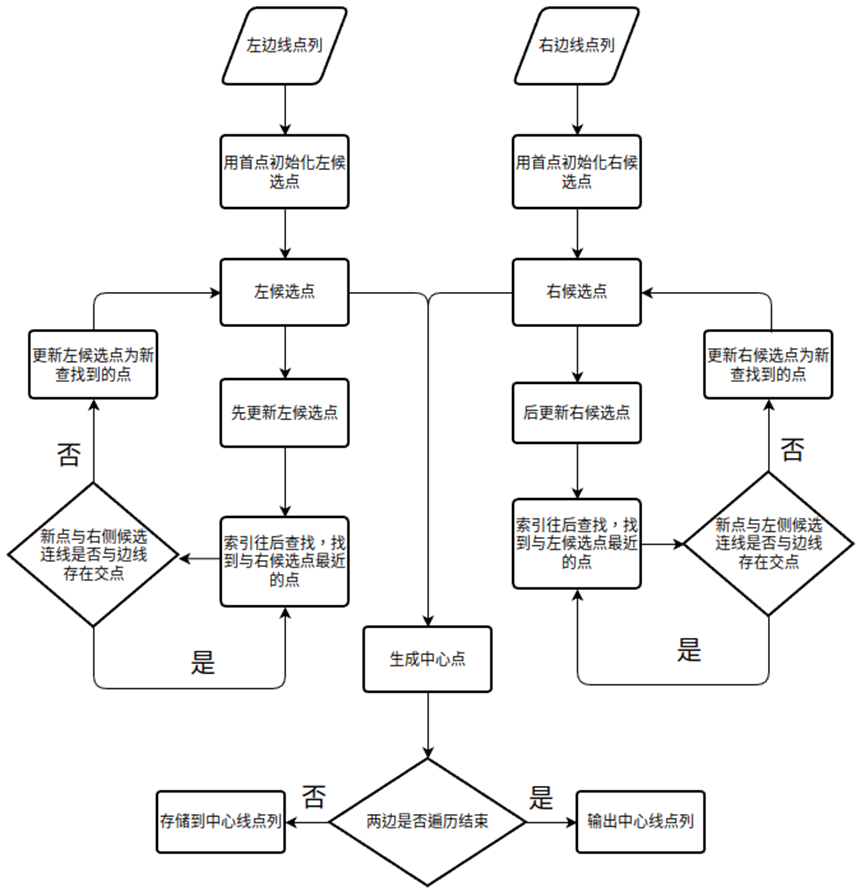
中心线算法:
地图元素响应:
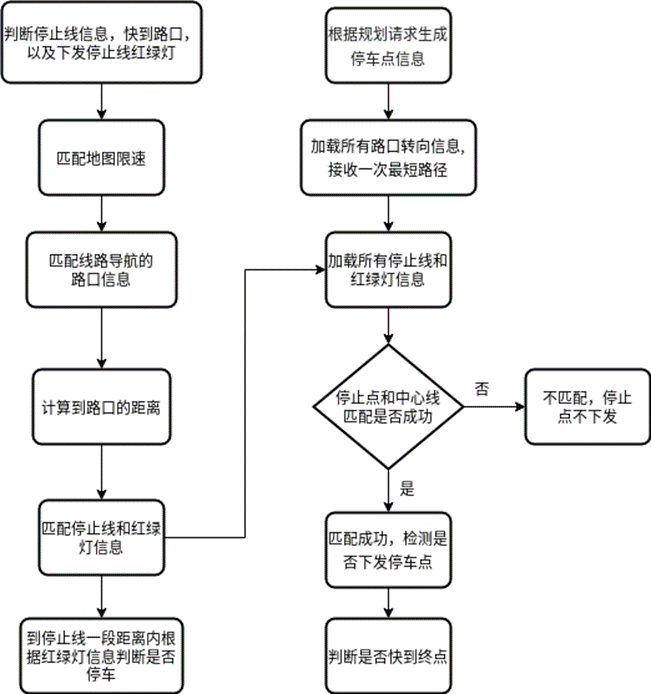
路口信息:根据最短路径找到车道,去查询其绑定的路口信息,找到本次规划所有经过的路口信息,用于路口提醒功能。
红绿灯信息:对于划分好的路径,加载路径里的停止线和对应的红绿灯信息,生成与终点对应的停车信息。
正常停车逻辑:在路由规划中会将终点匹配到车道中心线上,然后车辆行驶时,实时匹配到终点的距离,同时根据车当前速度和平常的刹车减速度去计算一个停车距离,并进行判断,是否下发停车点。
红绿灯停车逻辑:在加载地图构建最短路径的过程中,将所有该路径上经过的红绿灯以及停止线绑定到相应车道,车辆行驶时,实时通过车身定位来将车定位到车道上,再通过接收到的红绿灯感知信息,进行融合后,判断是否下发停止线以及红绿灯的颜色,给到下游模块。