OpenCV CUDA模块霍夫变换------在 GPU 上执行概率霍夫变换检测图像中的线段端点类cv::cuda::HoughSegmentDetector
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
cv::cuda::HoughSegmentDetector 是 OpenCV 的 CUDA 模块中一个非常重要的类,它用于在 GPU 上执行 概率霍夫变换(Probabilistic Hough Transform),能够检测图像中的线段端点(即直线段),而不是标准霍夫变换中表示为 (rho, theta) 的无限长直线。
类定义
class cv::cuda::HoughSegmentDetector : public cv::cuda::Algorithm
继承自 cv::cuda::Algorithm,提供了 GPU 加速的线段检测功能。
主要功能
- 在 GPU 上进行 概率霍夫变换
- 输出为一系列 线段端点,格式为 Vec4i(x1, y1, x2, y2)
- 支持边缘图作为输入(通常是 Canny 边缘检测后的图像)
构造函数 & 创建方式
你可以通过以下方式创建该类的对象:
cv::Ptr<cv::cuda::HoughSegmentDetector> hough = cv::cuda::createHoughSegmentDetector(rho, theta, threshold, minLineLength, maxLineGap);
参数说明:
| 参数名 | 类型 | 含义 |
|---|---|---|
| rho | float | 距离分辨率(像素) |
| theta | float | 角度分辨率(弧度) |
| threshold | int | 投票阈值,只有投票数大于等于此值的线段才被保留 |
| minLineLength | int | 线段最小长度,小于该值的线段将被忽略 |
| maxLineGap | int | 同一线段上点之间的最大间隙 |
方法列表(常用方法)
| 方法名 | 功能 |
|---|---|
| detect(InputArray src, OutputArray lines, Stream& stream = Stream::Null()) | 执行霍夫变换检测线段 |
| setRho(float rho) / getRho() | 设置/获取距离分辨率 |
| setTheta(float theta) / getTheta() | 设置/获取角度分辨率 |
| setThreshold(int threshold) / getThreshold() | 设置/获取投票阈值 |
| setMinLineLength(int minLineLength) / getMinLineLength() | 设置/获取线段最小长度 |
| setMaxLineGap(int maxLineGap) / getMaxLineGap() | 设置/获取线段最大间隙 |
代码示例
#include <opencv2/opencv.hpp>
#include <opencv2/cudaimgproc.hpp>int main()
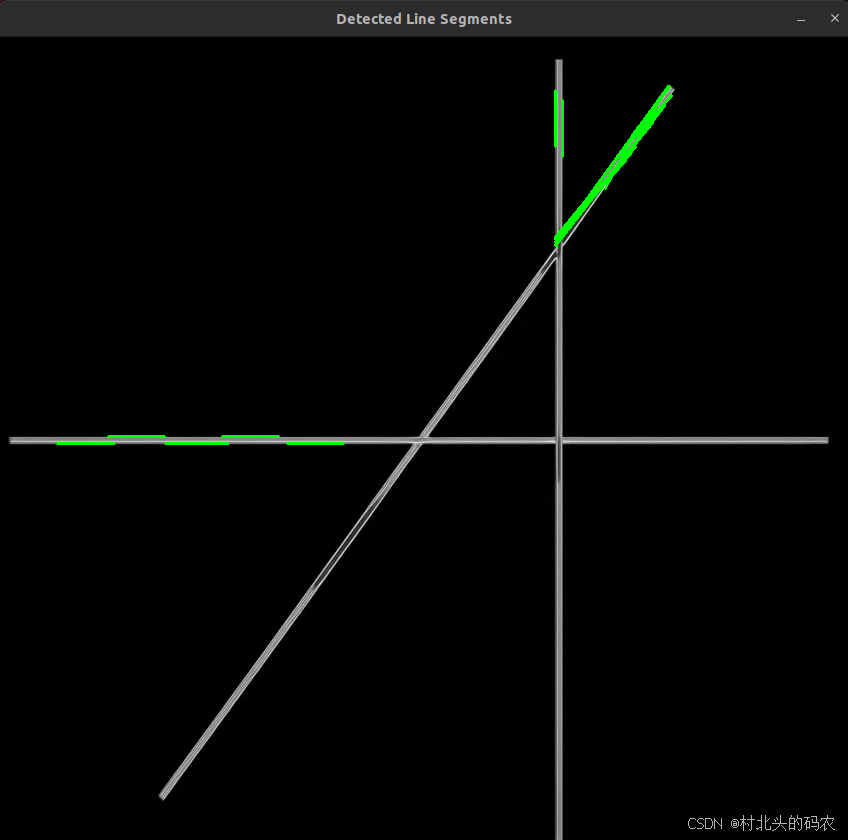
{// Step 1: 加载图像并转为灰度图cv::Mat h_src = cv::imread("/media/dingxin/data/study/OpenCV/sources/images/lines.png", cv::IMREAD_GRAYSCALE);if (h_src.empty()) {std::cerr << "无法加载图像!" << std::endl;return -1;}// Step 1.1: 图像预处理(高斯模糊降噪)cv::Mat h_blur;cv::GaussianBlur(h_src, h_blur, cv::Size(5, 5), 0);// Step 2: 上传到 GPU 并执行 Canny 边缘检测cv::cuda::GpuMat d_src, d_edges;d_src.upload(h_blur);cv::Ptr<cv::cuda::CannyEdgeDetector> canny = cv::cuda::createCannyEdgeDetector(100, 200);canny->detect(d_src, d_edges);// Step 3: 创建概率霍夫变换检测器float rho = 1.0f; // 距离分辨率float theta = CV_PI / 180.0f; // 角度分辨率(1 度)int threshold = 30; // 投票阈值(更敏感)int minLineLength = 50; // 最小线段长度(更短也保留)int maxLineGap = 20; // 线段之间最大间隙(容许更大间隙)cv::Ptr<cv::cuda::HoughSegmentDetector> hough =cv::cuda::createHoughSegmentDetector(rho, theta, threshold, minLineLength, maxLineGap);// Step 4: 执行线段检测cv::cuda::GpuMat d_lines;hough->detect(d_edges, d_lines);// Step 5: 下载结果std::vector<cv::Vec4i> h_lines;d_lines.download(h_lines);// Step 6: 绘制检测到的线段cv::Mat display;cv::cvtColor(h_src, display, cv::COLOR_GRAY2BGR);for (const auto& line : h_lines){cv::Point pt1(line[0], line[1]);cv::Point pt2(line[2], line[3]);cv::line(display, pt1, pt2, cv::Scalar(0, 255, 0), 2);}// Step 7: 显示结果cv::imshow("Detected Line Segments", display);cv::waitKey();return 0;
}
运行结果