lidar和imu的标定(三)平面约束的方法
看了一篇:基于平面特征的地面机器人雷达-惯性里程计外参标定方法;
它和GRIL-Calib不同之处,就是采用了平面优化和栅格优化。
栅格优化就不介绍了,感觉工程上不。
平面优化则很容易懂,就是标定出来了激光雷达到IMU之间的旋转平移之后,直接就把激光雷达中的点变换到IMU坐标系下,然后对符合平面的点进行平面拟合,然后呢?就是把imu坐标系下的点参与平面约束中,如公式:
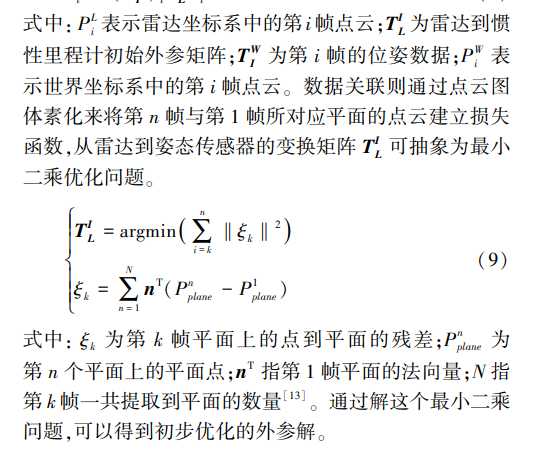
优化的就是旋转平移, 没有优化重力、imu偏置。
看了一篇:基于平面特征的地面机器人雷达-惯性里程计外参标定方法;
它和GRIL-Calib不同之处,就是采用了平面优化和栅格优化。
栅格优化就不介绍了,感觉工程上不。
平面优化则很容易懂,就是标定出来了激光雷达到IMU之间的旋转平移之后,直接就把激光雷达中的点变换到IMU坐标系下,然后对符合平面的点进行平面拟合,然后呢?就是把imu坐标系下的点参与平面约束中,如公式:
优化的就是旋转平移, 没有优化重力、imu偏置。