嵌入式硬件篇---蜂鸣器
蜂鸣器是一种常用的电子发声元件,主要分为有源蜂鸣器和无源蜂鸣器两类。它们在结构、工作原理、驱动方式、应用场景等方面存在显著差异。以下是详细介绍:
一、核心定义与结构差异
1. 有源蜂鸣器
- 定义:
“有源” 指内部自带振荡电路,无需外部提供振荡信号即可发声。这里的 “源” 是指振荡源,而非电源。 - 结构:
主要由振荡电路、发声元件(电磁线圈、磁铁、振动膜片)、外壳组成。振荡电路一般包含三极管、电阻、电容等元件,可产生固定频率的驱动信号。 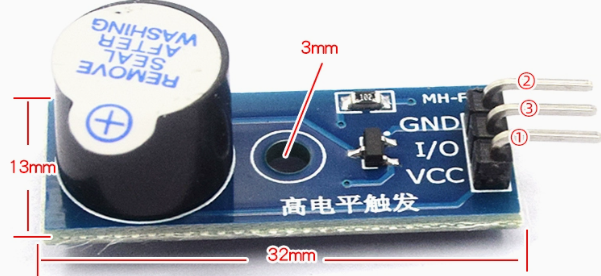
2. 无源蜂鸣器
- 定义:
“无源” 指内部没有振荡电路,需要外部输入特定频率的脉冲信号才能发声。 - 结构:
主要由电磁线圈、磁铁、振动膜片组成,结构更简单,体积通常更小。 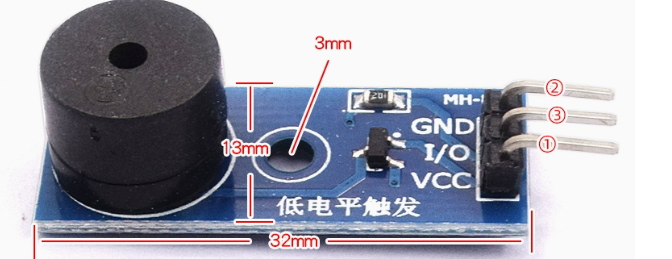
二、工作原理对比
1. 有源蜂鸣器
- 工作机制:
接通直流电源(如 5V)后,内部振荡电路自动产生周期性的驱动信号,使电磁线圈与磁铁相互作用,带动膜片振动发声。 - 发声特点:
- 通电后立即发出固定频率的连续音(如单调的 “滴” 声)。
- 频率由内部振荡电路决定,无法通过外部信号改变音调,只能通过通断电源控制发声与否。
2. 无源蜂鸣器
- 工作机制:
需要外部电路(如单片机)提供交变电压信号(如方波),当信号频率与蜂鸣器的固有频率一致时,产生共振发声。 - 发声特点:
- 可通过调整输入信号的频率改变音调(如发出不同频率的 “嘀嘀” 声)。
- 若输入直流信号或频率不符的交流信号,则不会发声。
三、驱动方式与电路要求
1. 有源蜂鸣器
- 驱动方式:
直接接入直流电源即可工作,无需复杂的驱动电路。 - 典型电路:
- 电源正极→蜂鸣器正极→蜂鸣器负极→限流电阻→接地。
- 可通过三极管或 MOS 管控制电源通断,实现开关控制(如单片机 IO 口驱动)。
- 优点:
驱动简单,适合新手或对电路复杂度要求低的场景。 - 缺点:
无法调制音调,功能单一。
2. 无源蜂鸣器
- 驱动方式:
需要交流驱动信号(如 500Hz~4kHz 的方波),通常由单片机或信号发生器提供。 - 典型电路:
- 通过单片机 IO 口输出 PWM(脉冲宽度调制)信号,经三极管放大后驱动蜂鸣器。
- 需搭配电阻、电容等元件稳定信号。
- 优点:
可通过编程灵活控制音调、节奏,实现音乐播放、多频率报警等功能。 - 缺点:
驱动电路较复杂,需掌握信号发生和放大技术。
四、主要参数对比
| 参数 | 有源蜂鸣器 | 无源蜂鸣器 |
|---|---|---|
| 工作电压 | 直流(DC),常见 3V~12V | 直流 + 交流(需叠加交变信号) |
| 驱动信号频率 | 固定(由内部电路决定) | 可调(需外部输入 0~ 数千 Hz) |
| 电流消耗 | 较大(因内部振荡电路耗电) | 较小(仅电磁线圈耗电) |
| 发声频率范围 | 单一频率(如 2kHz、2.7kHz) | 宽范围(如 200Hz~5kHz) |
| 体积 | 通常较大(含振荡电路) | 较小(结构简单) |
| 成本 | 较高(内部元件更多) | 较低 |
五、应用场景
1. 有源蜂鸣器
- 简单报警场景:
如电子门铃、热水器提示音、工控设备故障报警(仅需单一提示音)。 - 低成本产品:
如玩具、简易电子装置,无需复杂音效。
2. 无源蜂鸣器
- 智能设备与嵌入式系统:
如单片机开发板(Arduino、STM32)、智能家电(空调、洗衣机的提示音)。 - 音乐与音效场景:
如电子琴、游戏机音效、汽车倒车雷达(可发出不同频率的 “滴滴” 声)。 - 高频通信设备:
如 RFID 读卡器、传感器报警(需可调频率信号)。
六、如何区分两者?
- 外观判断:
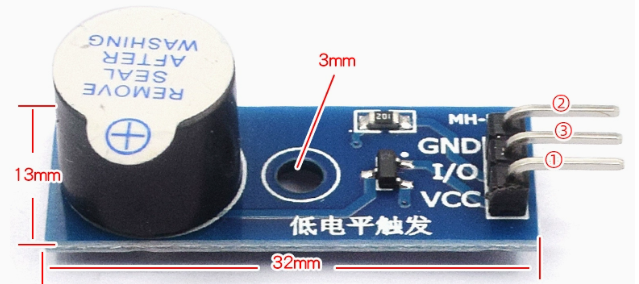
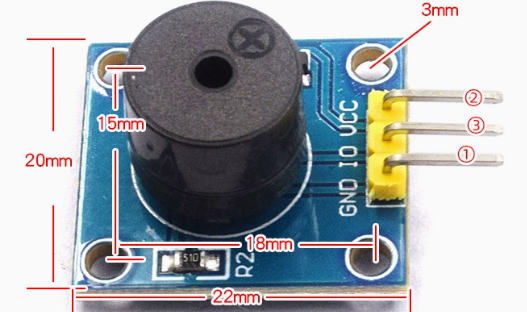
- 有源蜂鸣器外壳上通常标有 “+”“-” 极性,且底部可能有电路板;
- 无源蜂鸣器无极性标识,结构更扁平,底部无明显电路元件。
- 通电测试:
- 接入直流电源后,有源蜂鸣器立即发声,无源蜂鸣器不发声。
- 引脚数量:
- 部分有源蜂鸣器有 3 根引脚(电源 +、电源 -、信号输入),但多数为 2 引脚(仅电源正负);
- 无源蜂鸣器通常为 2 引脚(不分正负,但需注意交流信号极性)。
七、选型建议
- 选择有源蜂鸣器:
若只需单一提示音,追求电路简单、快速实现功能(如电子锁开锁提示)。 - 选择无源蜂鸣器:
若需要灵活控制音效(如播放乐曲、多档报警音),或系统具备信号发生能力(如单片机)。
两者各有优劣,实际应用中需根据功能需求、电路复杂度和成本预算综合考虑。