Ubuntu20.04 配置 yolov5_ros 功能包记录
文章目录
本文参考自博主源801,结合自己踩坑后修改
项目地址:https://github.com/mats-robotics/yolov5_ros
1.新建工作空间 新建一个工作空间 yolo_ros(名字可自定义),在 yolo_ros 下新建文件夹 src 并catkin_make进行编译
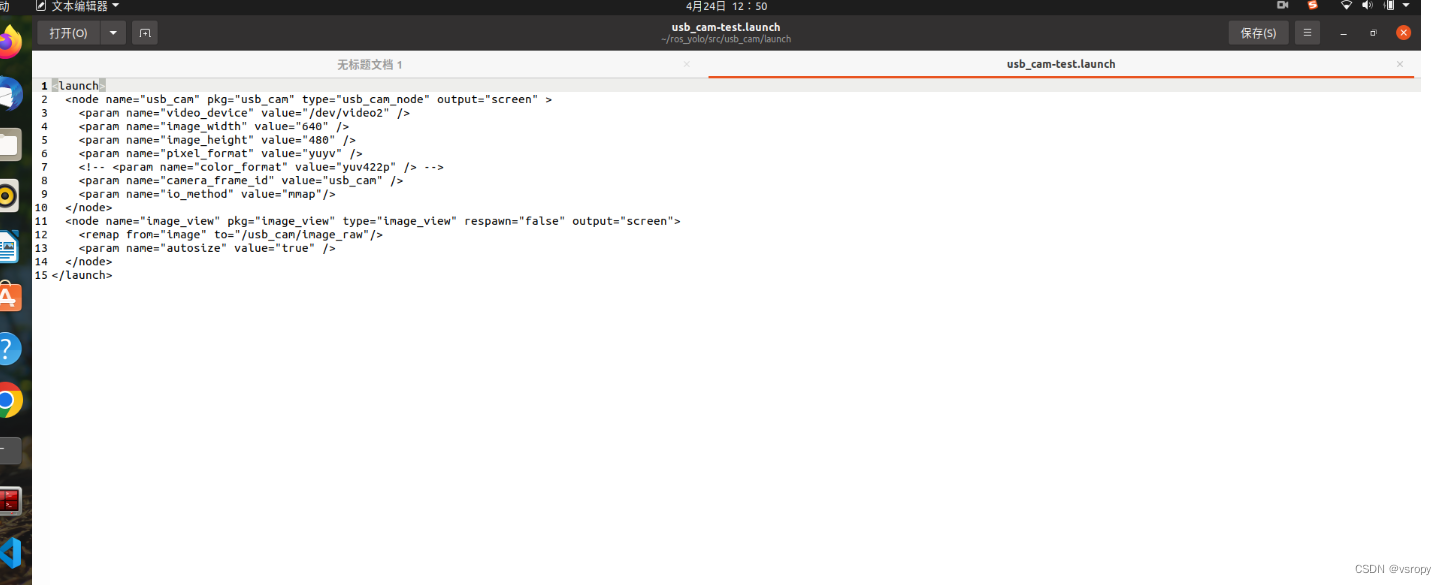
2. 安装相机驱动,可以选用较为主流的 usb_cam 或者 UVC_Camera,这里以 usb_cam 为例:在yolo_ros/src目录下打开终端执行:sudo apt install ros-noetic-usb-cam 这里的noetic对应于自己的ros版本号。安装完成后执行: roslaunch usb_cam usb_cam-test.launch 进行测试。如果碰到问题可以搜索定位到 usb_cam-test.launch 文件进行修改后再次测试。这里主要需要注意两点:
首先是第三行的 dev/video0 代表默认使用 0 号设备,需要使用外接摄像头的可以尝试将 0 改成 1,2,3等再次进行测试
然后是第六行的yuyv是视频的输入/出格式,这里根据摄像头能支持的参数修改即可,yuyv不行的可以改为mjpeg试一下。
3.下载yolov5_ros功能包到本地:在yolo_ros/src下打开终端执行以下两句命令下载功能包:
git clone https://github.com/mats-robotics/detection_msgs.git
git clo