BEV和OCC学习-1:数据集以及评估指标
目录
参考资料入门:
数据集:
BEV评估指标
KITTI数据集评价指标
nuScenes数据集评价指标
参考资料入门:
1. 高翔slam
2. AI:亚马逊 李沐Ai 莫凡python
3. arxiv.org/pdf/2303.01212 自动驾驶中基于网格的交通场景感知:研究综述 - 知乎
4. GitHub - qxiaofan/awesome-Bev-Occupancy-course: BEV & Occupancy 从入门到精通
数据集:
1. nuScenes
Object detection task - nuScenes
2. KITTI
The KITTI Vision Benchmark Suite
BEV评估指标
KITTI数据集评价指标
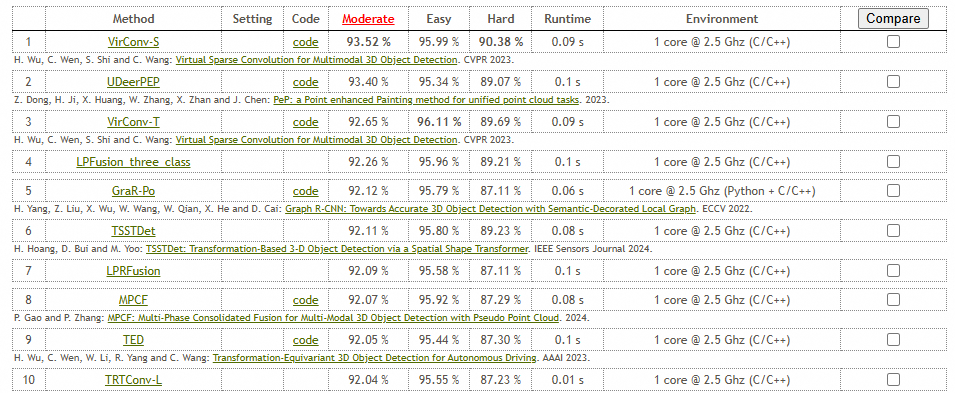
三种难度等级:Easy Moderate Hard
评价指标:
- 目标高度:指目标在BEV图像中占用的高度(即目标的最短边在BEV图像中要大于**Px)
- 最大截断率:最大截断率是指目标与激光雷达点云的匹配程度的上限:例如,在Easy难度级别下,最大截断率为15%,这意味着目标与激光雷达点云的匹配程度不低于85%;最大截断率=1-最小覆盖率
nuScenes数据集评价指标
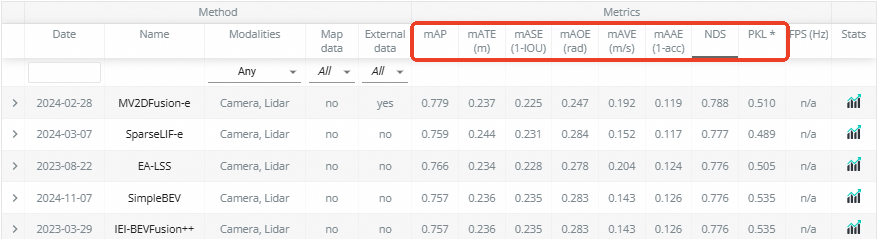
- mAP(mean Average Precision)bev下2d中心点的距离来评价,而不是像2d检测里用iou来评价;
- mATE(Average Translation Error)平均平移误差,中心点的2D欧式距离,单位米;
- mASE(Average Scale Error)平均尺度误差,中心点和朝向对齐后的尺度误差,1 - IOU,其中IoU是角度对齐后的三维交并比;
- mAOE(Average Orientation Error)平均角度误差,朝向误差,是预测值与真实值之间最小的偏航角差。(所有的类别角度偏差都在360°内,除了障碍物这个类别的角度偏差在180°内);
- mAVE(Average Velocity Error)平均速度误差,是二维速度差的L2范数(m/s);
- mAAE(Average Attribute Error)平均属性误差,被定义为1-acc,其中acc为类别分类准确度;
- NDS(nuScenes detection score)对上述所有进行加权平均

- 先计算所有类别的平均TP(mTP)
- NDS 的一半基于检测性能,而另一半则根据框位置、大小、方向、属性和速度来量化检测质量。由于 mAVE、mAOE 和 mATE 可能大于 1 ,因此会将每个指标限制在 0 和 1 之间。
- PKL:主要测量规划的路径与真实路径之间的差异,以此来衡量感知性能,差异越小,性能越优。
注意:
- AVE(平均速度误差):不适用于路标锥和障碍物,因为它们是固定不动的,没有速度可测量。
- AOE(平均角度误差):不适用于路标锥,因为它们没有明确的方向或朝向,无法评估其角度误差。
- AAE(平均属性误差):不适用于路标锥和障碍物,因为这些类别没有定义明确的属性,无法计算属性相关的错误率。