时间的基本概念及相关技术
时间是物理学的基本参量之一,也是物质存在的基本形式之一,构成时空坐标的第四维。时间的概念表示物质运动的连续性,事件发生的次序和长短,与长度、质量、温度等其他物理量相比,时间最大的特点是不可能保持恒定不变,而是川流不息,永不停止。本章描述时间的基本概念及相关技术。
1.1 时间的基本概念
“时间”包含了两个概念:时间间隔和时刻。前者描述物质运动或事件延续的长短,也就是描述物质运动的某一瞬间时间坐标原点之间的距离;后者描述物质运动或事件发生的某一瞬间所对应于时间坐标的读数。时间间隔与时刻,二者既有差别,又相互联系,被统称为“时间”。
通常,我们在靶场执行任务时所说的“半小时准备”就是前者;而“发射时刻”、“T0”均为后者;当然,“发射窗口”和调度口令“现在进入‘一小时准备’”,既包含了前者,又包含了后者。
时间测量、时间信息的传递和应用,对于人民生活、社会发展,特别是国防建设都是必不可少的。为了对时间进行测量,我们首先引入时间测量的基本方程。
任意一个连续运动的物理过程或不断变化的物理量F都可以表征为以时间t为自变量的函数即:
F=f(t) (1-1)
这个连续运动的物理过程如地球绕轴自转、斗转星移或谐振运动,其过程都是可以测量的。我们用某种时间测量“仪器”的“指针”(如太阳在天空的大圆盘上类似一个钟表的指针一样)进行时间测量。f(t)最简单的形式是线性函数,即:
F=f(t)=a+bt (1-2)
在进行时间测量的过程中,按式(1-2)选择物理运动过程时,总是选取某种周期性的运动。事实上,人类用以进行时间测量的周期运动过程可以分为三类:
(1)旋转体的自由旋转。例如地球自转导出了世界时(UT)。
(2)开普勒运动。即伴星体在引力作用下绕中心主星体的轨道运动。例如地球绕太阳的运动,月球绕地球的运动等,导出了历书时。
(3)谐波振荡。绝大多数机械钟或电子钟的振荡运动都属于此类,包括原子在“量子一机械系统”中辐射或吸收电磁波的振荡运动导出的原子的“秒”。
本节主要介绍三种时间的计量系统:天文时、原子时、协调世界时。
1.1.1 天文时
远古时代,人们“日出而作,日落而归”,古代劳动人民根据太阳的东升西落,昼夜交替周期所形成时间的计量单位之一——日,通常,我们把人们通过观测天文现象——日月星辰的周期性运动得到的时间统称为天文时。天文时包括:恒星时、太阳时、地方时、世界时、历书时和脉冲星时。
(1)恒星时。
恒星时是从地球自转得到的时间系统。
在天文学上我们把平春分点相对于某一固定子午圈连续两次通过子午线的时间间隔叫做一个平恒星日。一个平恒星日等分为24个平恒星时,一个平恒星时等分为60个平恒星分,一个平恒星分等分为60个平恒星秒,即一个平恒星日的1/86400叫做一个平恒星时的秒。同样,我们把真春分点相对于某一固定子午圈连续两次上中天的时间间隔叫做一个真恒星日。一个真恒星日的1/86400叫做一个真恒星时的秒。
(2)太阳时。
太阳是离我们最近的恒星,由于离我们近,在地球上观察到的太阳具有一定的视面,无法进行精确测量,所以我们观察到的太阳时包括真太阳时和平太阳时。
1)真太阳时。
简单地说通过直接观测太阳(例如:日晷)所得到的时间叫做真太阳时。在天文学中,我们把太阳的周日视运动直接得到的时间叫做真太阳时,也称为真时或视时,也就是说真太阳视圆面中心在地球上连续两次通过某地子午线(上中天)的时间间隔,称作一个真太阳日。一个真太阳日的1/86400叫做一个真太阳时的“秒”。
2)平太阳时。
测量真太阳时虽然方便、直观,但是由于地球自转存在不均匀性,因此,真太阳日的长短不一,这就导致真太阳时是不均匀的。这种真太阳时的不均匀性导致真太阳时不能作为时间计量的单位,有必要建立一种更完善并按照太阳运行计量时间的系统,这就是平太阳时系统,也称平时。平时是以真太阳周日视运动的平均速度为基础而选用的,平太阳是一个假想的参考点。
(3)地方时。
真太阳时和平太阳时都是以观测者所在地的子午线进行测量的,这样的时间计量系统所得的时间都是地方时,分别称为地方真太阳时和地方平太阳时。中央人民广播电台在整点发布的北京时间是由中国科学院国家授时中心产生并保持的东经120°的地方平太阳时。北京的经度是东经116°19',真正的北京地方时比法定的东8时区(东经120°)的北京时间要约15min。
(4)世界时。
法国科学家1820年似乎解决了秒长的定义问题,但实际操作中,这种秒长是不能实时得到的,必须经过一年的观测,最后经过平均才能得到秒长。为了解决这个问题,美国天文学家纽康(S. Newcomb)在19世纪末提出了用一个假想的太阳代替真太阳的设想,作为测定日长的参考,这个假想太阳在赤道上作匀速运动,其速度等于真太阳在一年中视运动的平均值,并尽量靠近真太阳。这样,天文学家就可以根据星周日视运动与假太阳之间的关系,实时测定平太阳时的日长和秒长。1886年,在法国巴黎召开的国际讨论会同意用纽康的方法严格定义平太阳日,从而产生了真正科学意义上的平太阳时秒长。后来,天文学家又规定了在英国格林尼治天文台观测得到的由平子夜起算的平太阳时做世界时,记为UT,并一直沿用到今天。无论是国家授时中心出版的《时间频率公报》,还是国际上的文献,凡是涉及的时刻,大多以世界时标明。我们有时在资料上看到的格林尼治平太阳时(greenwich mean time,GMT),也是指世界时UT。
世界时是以地球自转为基础的时间测量系统。但是,实际中的地球自转是不均匀的。地球自转速率的变化,包含有长期变化、季节性变化和不规则性变化。为了消除这些变化对世界时计量系统的影响,在天文学中自1956年起规定,把不加任何修正(将恒星时化为平太阳时的修正除外)通过观测恒星直接求得的世界时,记为UT0。
如果我们对UT0进行极移修正,并将经过极移修正得到的世界时记为UT1,则:
UT1=UT0+Δλ (1-3)
式中:Δλ是平均极移的修正值。
如果再对UT1进行地球自转速率周期变化的修正,就得到UT2,即:
UT2=UT1+ΔTs=UT0+Δλ+ΔTs (1-4)
式中:ΔTs是地球自转速率周期变化的修正值。但UT2系统也存在约±1×10^-8量级的不均匀性,如果一直沿用世界时,据推算,两千年后世界时与一个均匀的时间系统相比较将产生近2h的累积误差。
(5)历书时。
由于世界时UT系统以地球自转引起的太阳周日视运动为参考,即使经过各种修正,仍然存在未被修正的长期变化和不规则变化,还不能成为理想的时间计量系统,也不能满足现代自然科学对均匀时间的需求,因此,1958年国际天文学联合会决定,从1960年开始用一种新的时间制(ET)——历书时来替代世界时。
从原则上来讲,对于太阳系中任何一个天体,只要精确地掌握了它的运动规律,都可以用来定义历书时。19世纪末,纽康根据地球绕太阳的公转运动,编制了太阳历表,至今仍是最基本的太阳历表。因此人们把纽康太阳历表作为历书时定义的基础。
有了太阳的历表,根据规定的时刻时刻,可以查到太阳的相应位置。相反,由某一时刻观测到的太阳的位置与其历表比较,可以得到这一时刻的历书时。
历书时的秒定义为在1900年1月0日12时整回归年长度的1/31556925.9747。
由于观测太阳比较困难,实际上是通过观测月亮测定历书时与世界时的差值ΔT=ET-UT,再通过换算得到历书时的。但是,由于月面形状和边缘的不规则性,加上地球——月球潮汐作用引起的月球减速,都影响ΔT的准确测定,再加上天文观测仪器本身的精度所限,实际能得到的历书时的精度也只有10^-8量级,仍然满足不了现代科学技术发展的需求。
原子钟的出现,为我们提供了一种均匀而又使用方便的时间计量系统——原子时。除此之外,近年来天文学家发现脉冲星周期也具有非常高的稳定度,也许有可能成为新的时间计量系统。
(6)脉冲星时。
现代天文学研究和观测发现,脉冲星自转周期具有较高的准确度和稳定度,它有可能成为新的时间计量系统,也有可能成为新的导航定位系统。
1.1.2 原子时
原子物理学和量子物理学研究告诉人们,原子核外围电子会产生能级跃迁。低能级的电子吸收一定的能量时会向高能级跃迁,高能级的电子由高能级向低能级跃迁时会释放出一定的能量,辐射出频率稳定的电磁波,跃迁所辐射出的电磁波频率取决于原子本身的物理特性和外界所提供的能量,我们把这种以电子由高能级向低能级跃迁时辐射出的频率作为频率标准,即原子频率标准(简称原子频标),也称为原子钟。以原子频标为基准的时间计量系统,叫做原子时(atomic time,TA)。根据产生方式,原子时分为地方原子时和国际原子时。
(1)原子时的秒。
20世纪60年代,铯束原子频标研制成功后,人们用历书时秒的秒长去测量它,并得到一个历书时秒期间铯束谐振器的振荡次数(铯束谐振器的振荡频率):
fs=9192631770±20Hz (1-5)
1967年第十三届国际计量大会给原子时秒的定义是:铯原子133Cs基态的两个超精细能级间在海平面上零磁场中跃迁辐射振荡9192631770周所持续的时间。同时规定,原子时的秒、分、时、日、月、年的换算关系仍与世界时相同。原子时的起点是1958年1月1日0时,这一瞬间的原子时与世界时最为接近,仅差0.0039s。
(2)地方原子时。
由一个实验室的若干台原子钟或一个地区若干实验室的若干台原子钟组成的原子钟组得到的原子时称为地方原子时[TA(k)]。
根据定义,任何原子钟在确定时间起始位后连续运转,都可以提供原子时。各个实验室可以用连续运转的大铯钟,也可以用大铯钟定期校准连续运转的铷钟,商品小铯钟或氢钟,也可以用多个商品小铯钟组合,来导出各自的地方原子时。
(3)国际原子时。
由分布于全球各地的原子钟共同参与产生的原子时,则称为国际原子时。1971年,国际计量大会正式指定由国际时间局建立的原子时为国际原子时(international atomic time,TAI)。
截止到2016年,全世界有34个国家和地区的73个实验室参与此项工作。它们的数据通过约45个保持地方协调时的时频基准实验室,以共同约定的卫星双向、GPS共视和PPP比对方法和共同约定的数据格式,定期地向国际计量局(Bureau International des Poids et Mesures,BIPM)提供各自钟的资料,经国际计量局计算处理得到国际原子时,并以月报和年报的形式提供给参加合作的时频基准实验室。各时频基准实验室也可通过国际计量局在国际互联网上的网址向国际权度局提供数据或者从国际权度局获取数据。
1.1.3 协调世界时(UTC)
从1972年1月开始,协调世界时(universal time coordinated,UTC)正式成为国际标准时间,它代表了两种时间尺度:国际原子时TAI和世界时UT1的结合。UTC的定义如式(1-6)所示。
| UTC(t) - UT1(t) | < 0.9s (1-6)
在1974年以前阈值为0.7s,以后改为0.9s。UTC的具体实施办法是:取消频偏调整,使UTC秒长严格等于TAI秒长,在时刻上又使UTC接近于UT1。
(1)闰秒。
地球自转速率的不均匀性导致UT1与TAI存在秒差,这可以采用在UTC时刻中加1s或减1s的措施来补偿,由此引出闰秒(即跳秒)的概念。
规定的闰秒时间是6月30日或12月31日,12月31日被称为法定闰秒时间,而6月30日称为候补闰秒时间。具体作法是在UTC时间系统中将6月30日或12月31日这两个日期的最后1分钟时间长度改为61s或59s。例如UTC在2015年6月30日做了闰秒调整,在我国即出现北京时间2015年7月1日7时59分61秒。
由于地球自转速率的不均匀性,近20年来,世界时每年比原子时大约慢1s,在确定原子时的起点后,二者之差逐年累积,到2016年已达36s。引入闰秒后,国际原子时、协调世界时和世界时之间的关系如图1-1所示。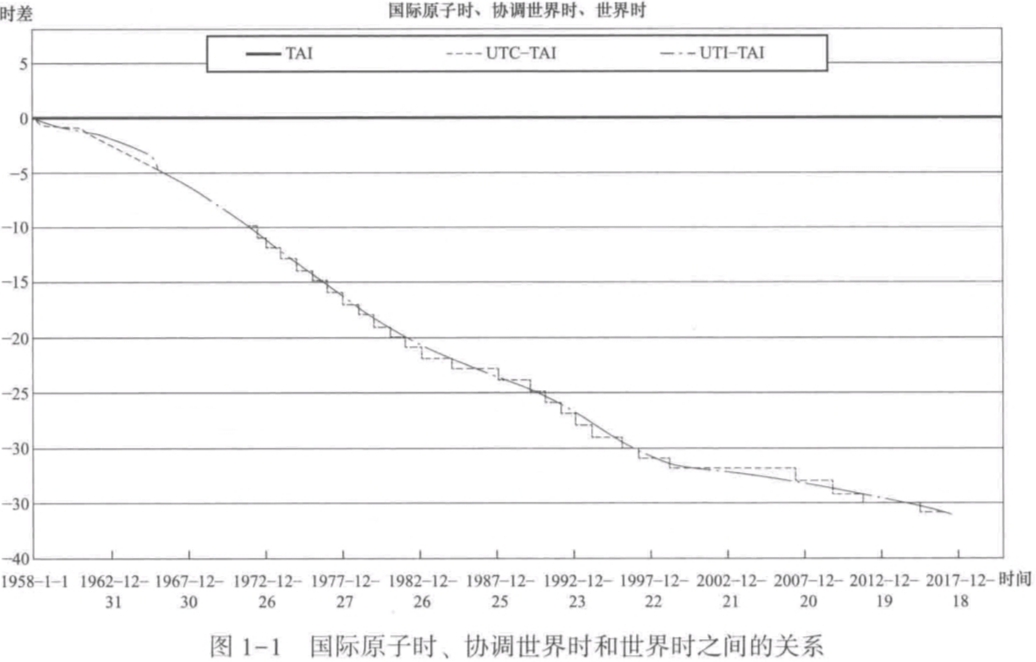
(2)我国的时间基准保持。
我国时间基准由中国科学院国家授时中心保持,标记为UTC(NTSC,自2015年开始UTC(NTSC)与UTC的偏差控制在20ms以内。目前国际上70多个实验室只有少数几个实验室能达到这一水平,可见UTC(NTSC)的控制精度名列前茅。2012年国际上几个主要时频实验室UTC(k)控制精度如表1-1所示。
表1-1中,SU为俄罗斯国家物理无线电测量科学研究院,IT为意大利国家计量研究院,NICT为日本国家通信与信息技术研究院,NIST为美国国家计量院,NTSC为中国国家授时中心,NIM为中国国家计量院,PTB为德国联邦物理技术研究院,OP为法国巴黎天文台,USNO为美国海军天文台。
1.2 现代授时技术
授时是指确定、保持某种时间尺度,并通过一定方式将代表这种时间尺度的时间信息传递给用户的一系列工作。古代,人们以观察测时,以打更、晨钟暮鼓、武炮的方式进行授时,基本上满足了人们劳作和生活的需求。17世纪,随着航海事业的发展,出现了落球报时。现代随着科学技术的进步,授时手段得到长足发展,各种高精度授时技术相继产生,授时技术由陆基的短波、长波、低频时码授时发展到星基的卫星授时,授时精度从早期的秒级发展到现在的纳秒、亚纳秒、皮秒量级,授时的精度和质量大大提高。当今社会,从基础科学研究(天文学、地球动力学、物理学等领域)到工程技术领域(通信与信息传递、导航定位、卫星发射、武器试验、电力配送、能源、交通运输、地震监测和计量测试领域),授时技术都得到了广泛的应用。
本节将对现代常用的短波授时、长波授时、低频时码授时、卫星授时以及电视授时、电话授时和网络授时等常见的授时方法进行介绍,并且将各授时系统以及系统所发播的授时信号的格式、程序和授时精度进行比较。
1.2.1 短波授时
现代授时始于20世纪初期,1905年在美国、1915在法国和德国先后实现了短波无线电授时。
1.2.1.1 短波授时
短波授时与短波通信一样,其无线电波有地波和天波两种方式。地波沿地表传播,传播路径稳定,但衰减很大,只适合授时台附近用户使用,覆盖范围只有几十千米。天波是依靠电离层对短波的反射作用而传播的,由于电离层可以多次反射短波,所以可以将授时台的信号传播到很远的地方。但是短波天波的传播存在多径效应,所以授时时延较大,这使得短波授时精度只有毫秒量级。同时,短波授时还存在噪声大、干扰多和衰减明显等特点。虽然短波授时有以上缺点,但由于其覆盖范围广、授时设备简单、接收装置简单,因此仍然得到了广泛的应用。
目前,短波授时主要应用于传播我国的标准时间。中国科学院国家授时中心短波授时台播发的短波信号,呼号为BPM,授时精度为1ms。
其授时信号波形图如图1-2所示。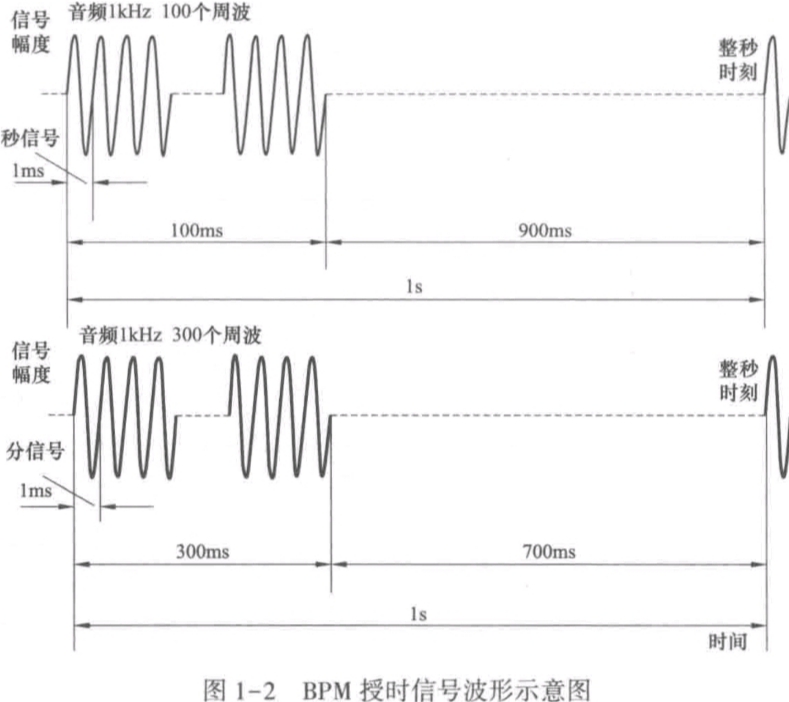
1.2.2 长波授时
长波授时是基于Loran-C远程陆基无线电导航系统发展起来的高精度授时系统。20世纪50年代到70年代,美国在全球建立了数十个远程陆基无线电(Loran-C)导航台链,并实现了远程陆基大功率无线电导航与授时。同期,苏联也建立了自己的远程陆基大功率无线电导航系统—恰卡系统,它完全类似于美国的Loran-C系统。
1985年7月1日,我国BPL长波授时兼导航台在中国科学院国家授时中心建成并开始发播长波无线电授时和导航信号,这标志着我国陆基远程无线电导航系统的建成。
1994年,我国在沿海建立了“长河二号”导航系统,它是我国新建的陆基导航、定位系统,由北海、东海和南海3个导航台链的6个发射台所组成,该系统覆盖了我国大部分海域和沿海陆地,实现了我国沿海区域的Loran-C导航系统。2007年,我国启动了“长河二号”的授时工程,并考虑在我国西北建立新的Loran-C导航台链。
我国长波授时主要是利用长波信号传播稳定、延迟可精确预测的特点,实现高精度授时。其中,沿地面绕射的地波信号和经过电离层反射而传播的天波信号都可用于授时,其授时精度为1μs,校频精度为1×10^-12量级。
长波授时台导航、授时信号波形图如图1-3所示。图1-3(a)为一个导航台链的信号,第一组9个脉冲为导航授时主台发射的信号,第二组8个脉冲信号为第一导航授时副台发射的信号,第三组8个脉冲信号为第二导航授时副台发射的信号,第四组9个脉冲信号为经过一个组重复周期后第二个组重复周期的第一导航授时主台发射的信号。图1-3(b)是经过放大的一个脉冲信号。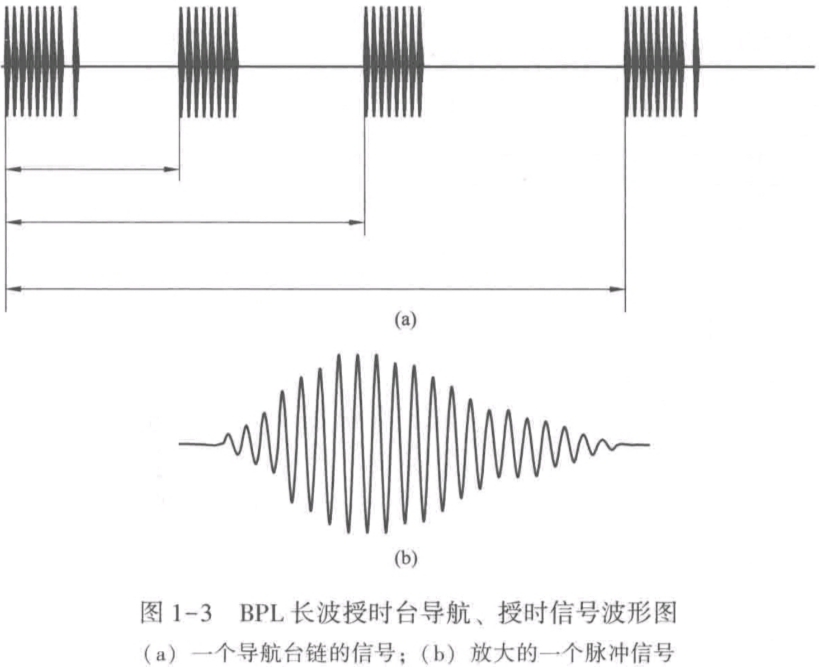
1.2.3 低频时码授时
低频时码授时是国际电信联盟(ITU)一直推荐的一项授时技术。它工作在低频频段,可以用模拟或数字模式提供标准时间和频率信号。随着微电子技术的发展,低频时码的用户设备简单价廉,在中、低精度军用、民用,特别是电力电网、通信网、金融证券系统、电子政(商)务以及钟表领域得到广泛应用。下面介绍几种国内外的低频时码授时系统。
(1)WWVB。
WWVB时间码是美国国家标准技术研究院(NIST)所能制播发的低频时码授时信号,其信号格式如图1-4所示。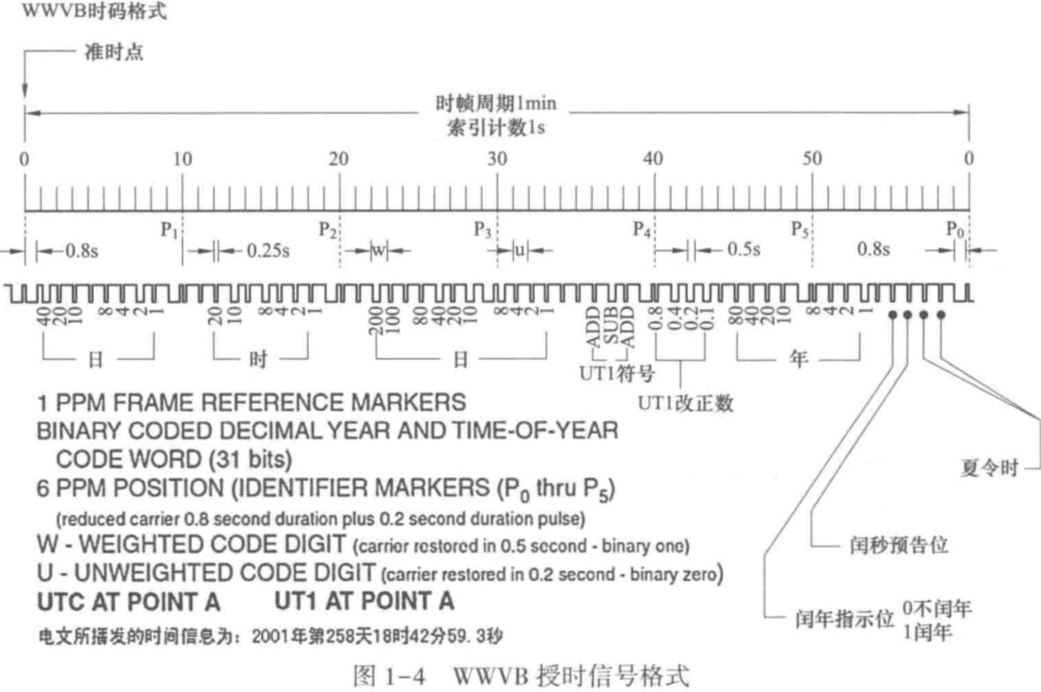
其主要参数如下:
1)时帧周期:1min。
2)码数字权重选择:BCD码;BCD天时码字长—35bit。其中包括分、时、日、UT1改正数、夏令时、闰年等信息。
3)码元结构:BCD码字从索引计数10+30ms开始。BCD码元出现在两个位置标记码元之间,依次为分7bit,时6bit,日10bit,UT1改正数7bit,年1bit,闰年指示1bit,闰秒预告1bit,夏令时DST 2bit,直到码字结束。位置标记出现在每两组十进制数字之间,用于识别和解码校验。
(2)DCF77低频时码台。
DCF77为德国时间信号与标准频率发射台,发射台坐标为:09°00'E(东经),50°01'N(北纬)。
DCF77又称低频时码台,其工作(载频)频率为77.5kHz。它所播发的低频时码编码格式被称为DCF77时间码,其基本特征如图1-5所示,其授时精度为1ms。
其主要参数如下:
1)时帧:1min。
2)信息位:60,每秒播发1个信息。
3)码元结构:BCD码字从0s开始,第1s~第14s为保留位,第15s~第20s为R、A1、Z1、Z2、A2和S信息:第21s~第27s分别为分个位和分十位信号的8421编码,第28sP1为分位的校验位;第29s~第34s分别为时个位和时十位信号的8421编码,第35sP2为时位的校验位;第36s~第41s分别为日个位和日十位信号的8421编码;第42s~第44s为星期的8421编码;第45s~第49s为月的8421编码;第50s~第57s为年的8421编码;第58s为校验位P3;第59s为空白。第0s为整分信号。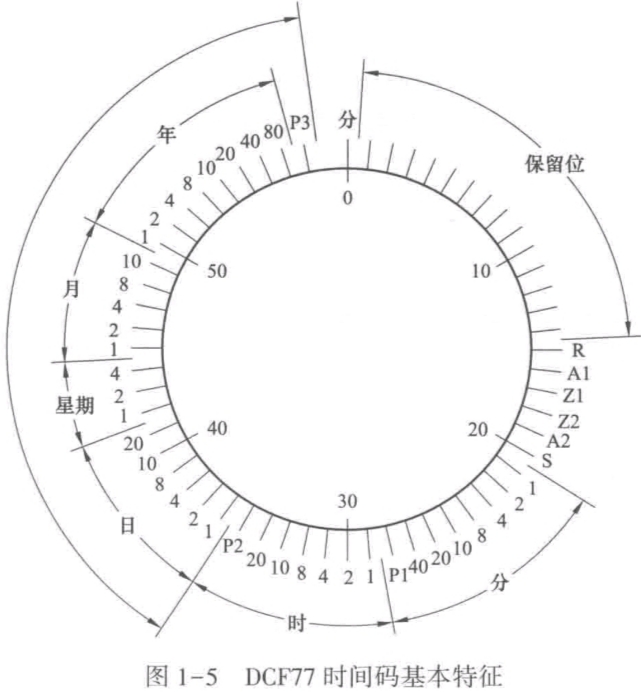
(3)JJY40/60低频时码台。
JJY40/60kHz为日本国家通信与信息技术研究院(NICT)于1999年建立的标准时间信号发射台,发射台坐标为:140°51′00″E(东经),37°22′10″N(北纬),信号格式如图1-6所示,其授时精度为1ms。
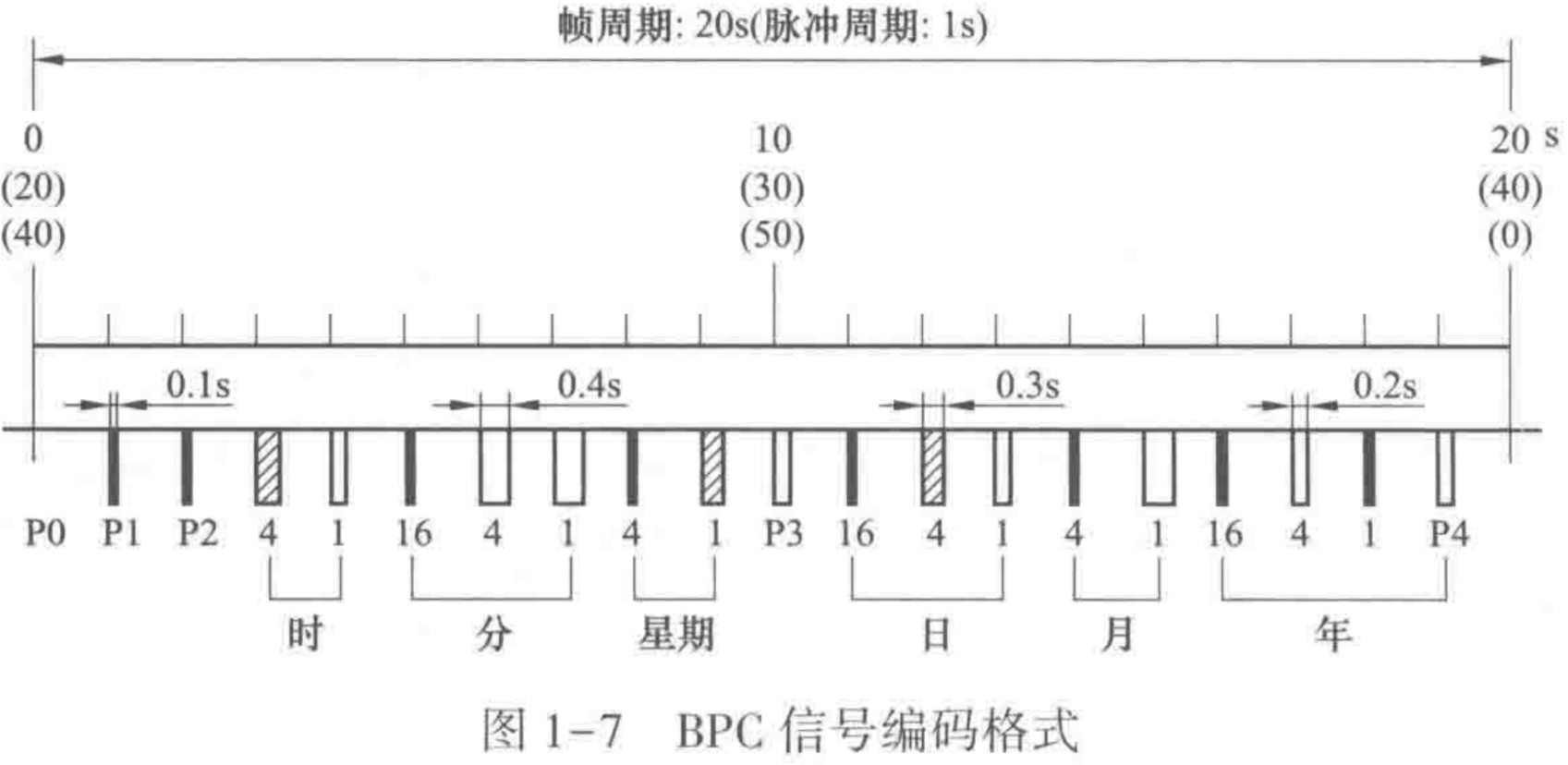
(4)BPC68.5低频时码台。
BPC68.5为中国科学院国家授时中心于1997年建立,并于同年试发播的低频授时台,其工作频率(载频)为68.5kHz,它所播发的低频时码编码格式被称为BPC68.5时间码。
BPC68.5试播信号编码格式基本与DCF77相同。正式发播的BPC信号帧周期为20s,每秒发3帧,采用四进制脉冲宽度编码,其编码格式如图1-7所示。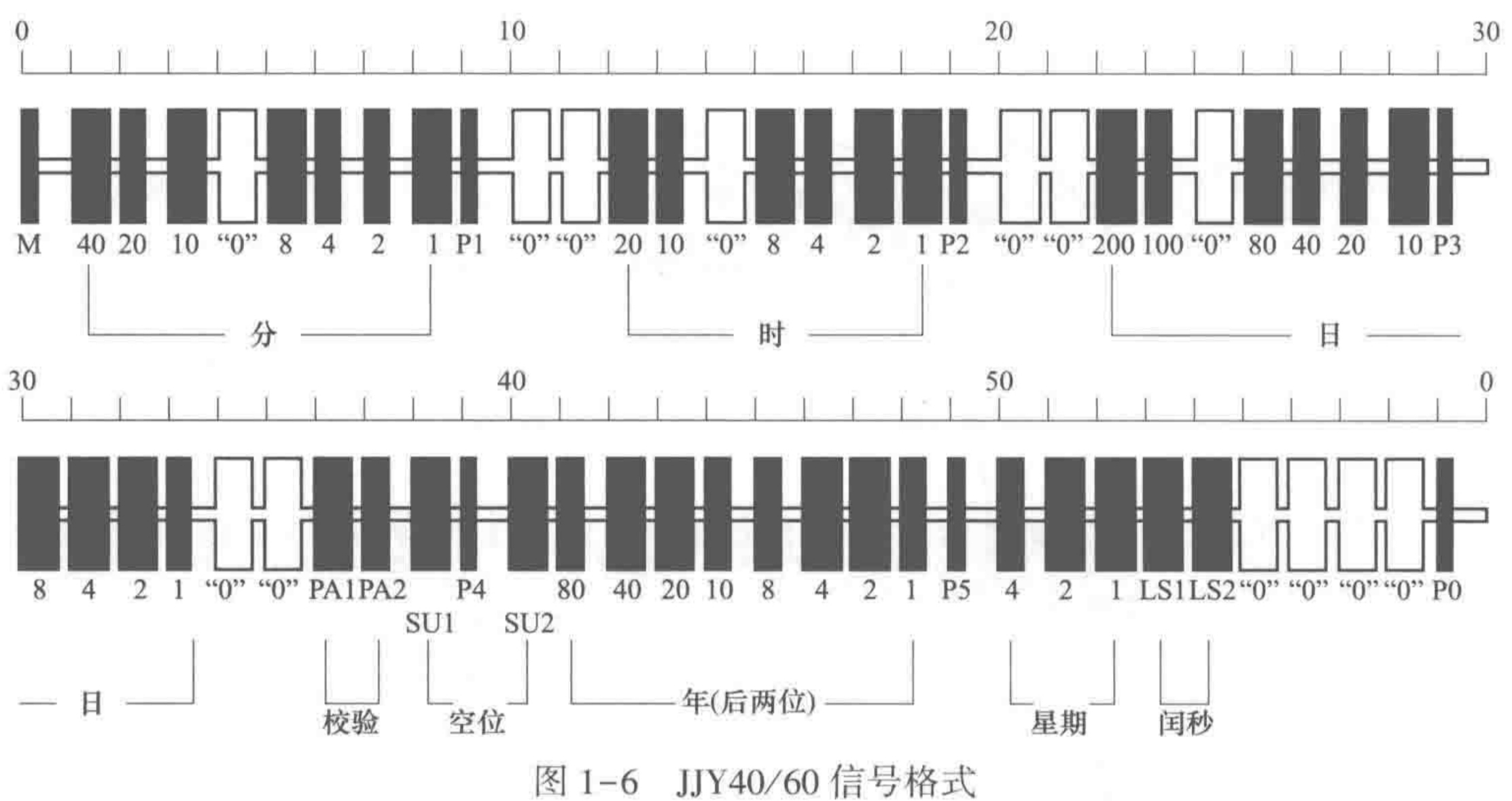
 1.2.4 卫星授时
1.2.4 卫星授时
自从1957年第一颗人造卫星上天后,利用卫星进行通信、导航定位和授时得到了迅猛的发展。卫星授时即卫星发射星载原子钟产生的时间信号和信息,地面接收设备通过接收导航电文及相关信息,自主计算钟差,并修正本地时间,使本地时间与UTC或系统时间同步。卫星授时具有授时精度高、覆盖范围广等特点,是现代授时技术应用与发展方向。
1.2.4.1 卫星授时原理
全球卫星导航系统(简称GNSS系统)时钟参数采用UTC,它既可以满足人们对均匀时间间隔的要求,又可以满足人们对以地球自转为基础的准确世界时刻的要求。卫星授时是因为GNSS卫星上搭载有原子钟,这些原子钟保持的时间与UTC时间同步,这样地面上的用户就可以接收来自GNSS卫星的时间服务信号来校正本地时钟,使之与GNSS时钟同步,从而完成授时任务。
一般来说,若用户的位置坐标已知,那么只需要观测一颗卫星就可以实现精密的时间测量或同步,我们把这种模式称为位置保持模式。在用户位置未知时,由于用户位置有三个未知数,时间也是未知数,所以这时用户需要接收四颗GNSS卫星信号才能实现定时和定位,我们把这种模式称为自主定位模式。
自主定位模式时,假设四颗GNSS卫星的坐标为式中:ρi(i=1,…,4)为用户到GNSS卫星的伪距实测值;c为光速。
求解以上方程组可以得到用户位置坐标和用户相对于GNSS系统时间的钟差Δt,然后利用Δt修正用户时钟就可以实现GNSS时间的同步。
1.2.4.2 卫星导航系统
目前用于授时的GNSS主要包括美国的全球定位系统(GPS)、俄罗斯的格洛纳斯系统(GLONASS)、欧洲的伽利略系统(GALILEO)和我国正在建设的北斗卫星导航系统(BDS)。
(1)美国的全球定位系统(GPS)
GPS系统是美国导航卫星NAVSTAR/GPS系统的简称,又称为全球定位系统,是20世纪60年代末由美国国防部研制的军民两用的全天侯、全时空、连续实时提供精确定位服务的星基无线电导航定位系统,经过20多年研制建设,耗资230多亿美元,于1994年正式建成。
1)系统组成。
GPS系统由空间段、地面段和用户端三部分组成。
GPS系统空间段组网结构为:星座有24颗中低轨轨道卫星,分布在6个圆轨道面上,每个轨道面上分布4颗卫星,其中1颗为备用卫星,轨道高度约20200km,轨道周期为11h58min,轨道与赤道之间的倾角为55°。其卫星空间分布如图1-8所示。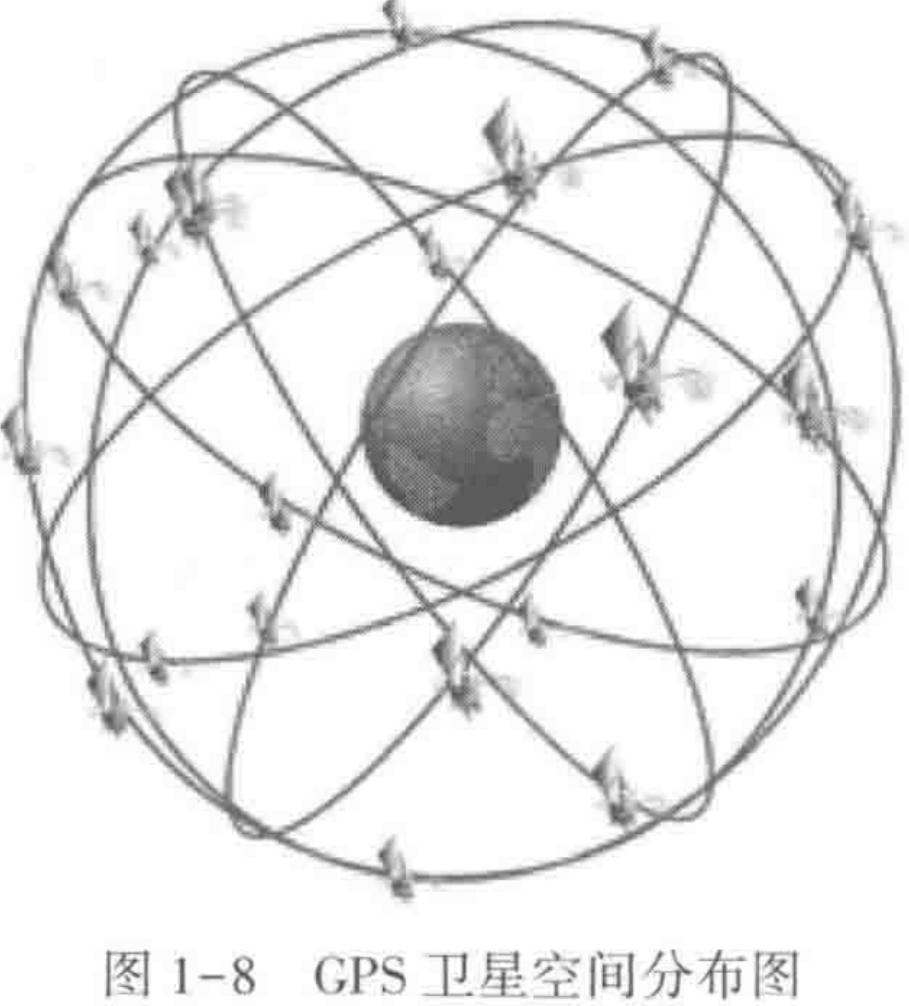
地面段主要由主控站、监测站、注入站组成,主控站负责收集由卫星和其他地面站传回的信息,并计算卫星星历、相对距离、大气校正等参数。
用户端主要是GPS信号接收机,用来计算用户所在位置的经纬度、高度、速度和时间等信息。
2)系统时间。
GPS时间是一种由GPS地面测控系统建立的连续运行的时间系统,其时间原点定在1980年1月6日0时。它溯源到美国海军天文台所产生和保持的协调时UTC(USNO),溯源链路如图1-9所示。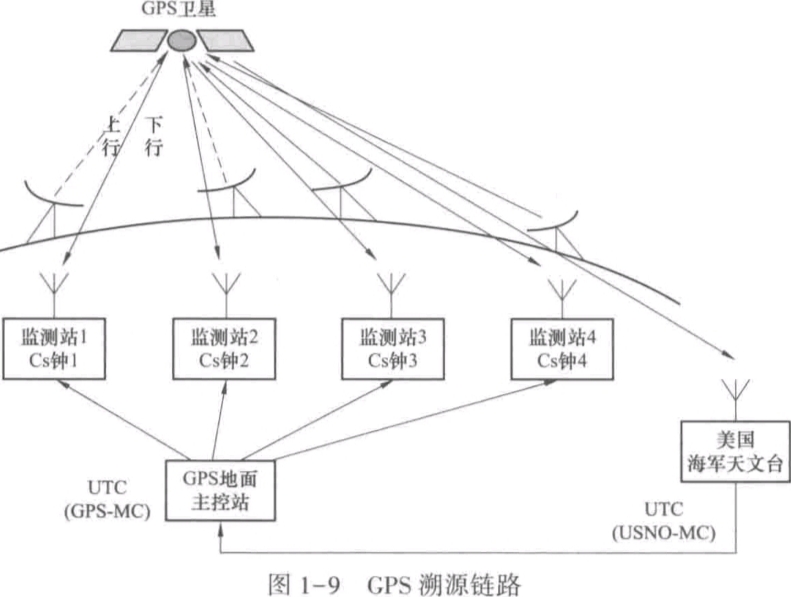
GPS时间与国际协调时UTC不同之处在于它不作闰秒修正,因而是一个连续的时间尺度。它与国际原子时相似,但与国际原子时存在任一瞬间都存在一个1%的系统差,即:TAI - TGPS= 19s。
(2)俄罗斯的格洛纳斯系统(GLONASS)。
GLONASS系统是前苏联建立的类似于GPS系统的星基无线电导航系统,其前身CICADA与美国海军卫星导航系统NNSS(子午系统)同期,于1965年设计,20世纪70年代中期开始启动GLONASS计划,1982年10月12日发射第一颗GLONASS卫星,1996年1月18日,完成24颗卫星的布局,卫星具备完全工作能力。
1)系统组成。
GLONASS系统由24颗卫星组成,它们均匀分布在轨道高度约为20000km的3个轨道平面上,每个平面上分布8颗卫星。轨道倾角为64.8°,轨道平面相互间隔120°,星座图如图1-10所示。同GPS系统一样,GLONASS系统也由空间段、地面段和用户端三部分组成,其功能也与GPS系统的各组成部分的功能基本相同。
2)系统时间。
GLONASS系统时间是一个与协调时UTC相类似但又不完全相同的原子钟时系统。与GPS系统时间不同的是GLONASS系统时间引入了跳秒(闰秒),并以莫斯科时间为基准,它溯源于俄罗斯时间空间计量研究所所产生和保持的俄罗斯协调时UTC(SU),但与UTC(SU)之间存在3h的系统差,如式(1-8)所示。
TGLONASS= UTC(SU)+03h00min(1-8)
(3)欧洲的伽利略系统(GALILEO)。
由于GPS、GLONASS分别由美国和俄罗斯军方控制,且目前GLONASS在轨卫星缺失,GPS独霸市场。1982年欧空局提议要建立一套以民用为目的的全球卫星导航系统,其是一套共享的、独立于GPS的无增强条件下的适用于海陆空的系统。2002年2月26日,欧盟正式启动GALILEO系统建设,计划耗资32亿~36亿欧元。
1)系统组成。
GALILEO系统由30颗高轨道卫星组成,分布在轨道高度为24000km,倾角为56°的3个轨道面上,如图1-11所示。同GPS系统和GLONASS系统一样,GALILEO系统也由空间段、地面段和用户端三部分组成。目前GALILEO系统有两颗在轨试验卫星。
2)系统时间。
GALILEO系统时间简称为GST,是一个连续运行的原子时,其时间基准由位于意大利的弗西罗伽利略控制中心提供,初始历元为1999年8月22日0时。它与GPST类似,不进行闰秒调整,与TAI有一个常数偏差。
GPS系统、GLONASS系统、GALILEO系统参数比较如表1-2所示。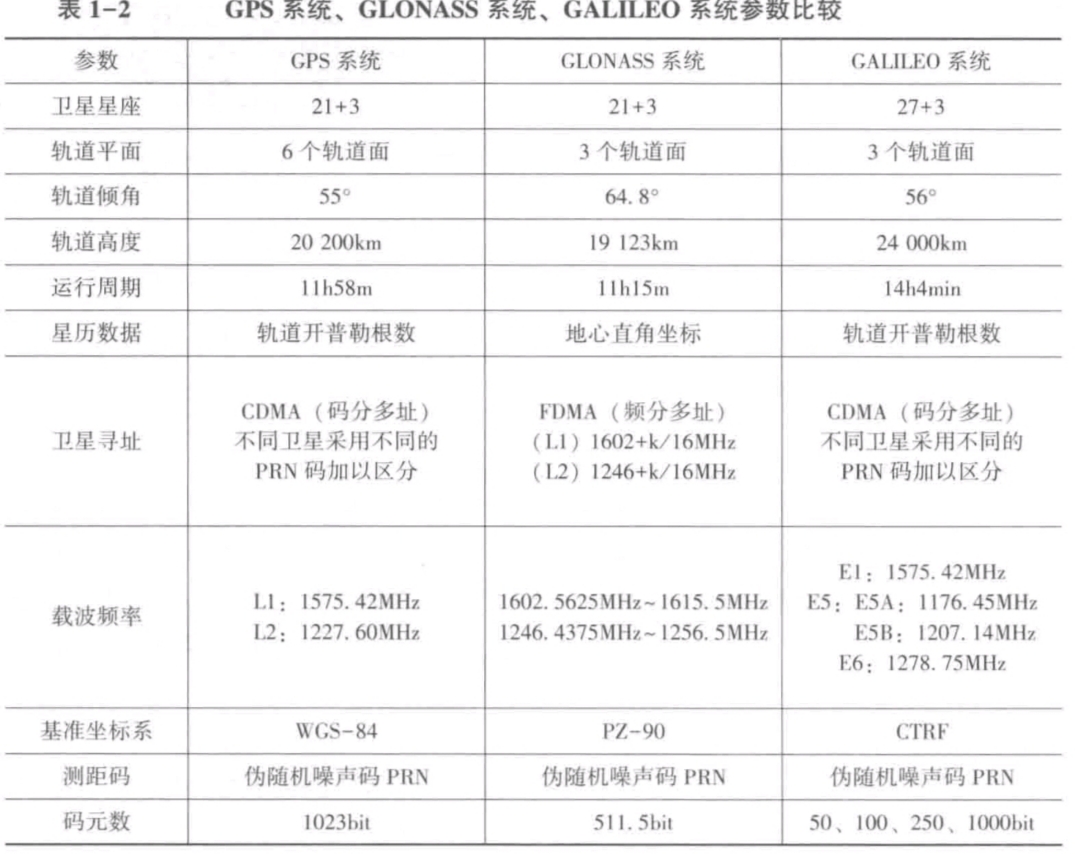
(4)中国的北斗卫星导航系统(BDS)。
北斗卫星导航系统是中国正在建设实施的自主发展、独立运行的全球卫星导航系统。系统目标是建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的卫星导航系统。北斗卫星导航系统按照“三步走”的发展战略,其建设分为三步,第一步建成北斗双星卫星定位系统,第二步建成北斗区域卫星导航系统,第三步在2020年左右全面建成具备全球服务能力的北斗全球卫星导航系统。
北斗双星卫星定位系统又称为“北斗一号”系统,1994年启动系统建设,它是由两颗地球同步轨道卫星、1个地面控制中心站、若干个地面监测站所组成的北斗卫星导航试验系统。“北斗一号”系统服务范围包括中国大陆、台湾、南沙及其岛屿,中国海、日本海、太平洋部分海域及我国部分周边地区。“北斗一号”系统工作模式为有源定位模式,它只能提供低动态或静止定位服务。此外,“北斗一号”系统还可以向用户提供授时服务和简短数字报文通信服务。
①“北斗一号”空间部分。
“北斗一号”空间部分由两颗工作卫星和一款在轨备用卫星所组成。三颗卫星均为地球静止同步轨道卫星,分别定点于东经80°和140°。两颗同步轨道卫星于2000年底发射,2003年又发射了一颗备用卫星,其系统原理图如图1-12所示。三颗卫星距离地面的高度约为36000km。
“北斗一号”地面控制中心站站,入站信号频率如下:
a. 出站信号工作频率:
地面站地面控制中心站到两颗卫星为6176.23 ± 4.08MHz,6273.51 ± 4.08MHz。
卫星到用户接收机或标校站为2491.75 ± 4.08MHz。
b. 入站信号工作频率:
两颗卫星到地面主控站为3950.40 ± 4.08MHz,3999.04 ± 4.08MHz。
用户接收机或标校站到卫星为1615 ± 4.08MHz。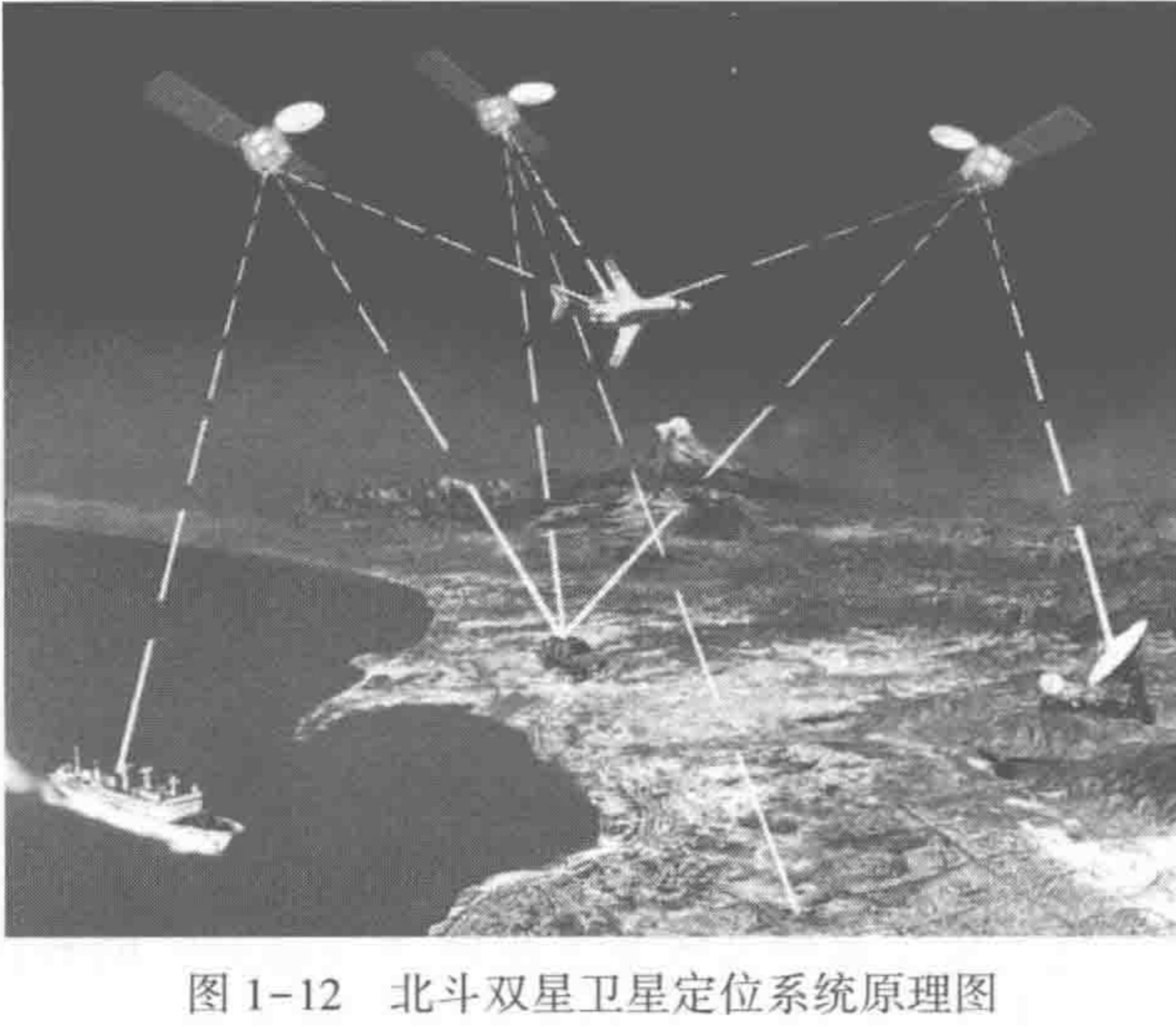
②“北斗一号”地面控制部分。
“北斗一号”地面控制部分包括地面测控系统和地面标校系统。地面控制部分为“北斗一号”的控制、管理中心,负责卫星监控、用户定位的计算、授时、通信等主要业务的操作、管理和控制。测控站用于对卫星的监控和信息注入。标校系统由各类标校站所组成,它们分别担负卫星轨道的测定差分定位和气压测高任务。
③“北斗一号”用户系统。
“北斗一号”用户系统主要包括普通用户接收机、指挥型接收机和授时型用户接收机。
a. 普通用户接收机。
普通用户接收机按照服务频度分为三类:一类:5~10min;二类:10~60s;三类:1~5s。一类用户机的服务频度最低,适用于手持或车辆应用;三类服务频度最高,适用于时速小于1000km/h的运动载体及特种用户应用。
b. 指挥型用户机。
指挥型用户机能够管理100个普通用户机,在不需要各普通用户机通报的情况下,能够实时掌握所管辖的每个普通用户机的位置,并实现通播、控制和通信接收。
c. 授时型用户接收机。
授时型用户接收机通过地面控制系统提供的授时基准信号,根据导航电文的某一个特征帧和插入到导航电文中的有关时间信息,特征帧相对于标准时间的改正值实现授时服务。其授时服务分为两种方式,一种是单向授时,标称定时精度为100ms;另一种是双向授时,标称定时精度为20ns。
d. 时间溯源。
“北斗一号”系统通过设置在中国科学院国家授时中心的时间标校站,溯源于中国科学院国家授时中心所产生和保持的国家标准时间UTC(NTSC)。其系统时间BDT与UTC(NTSC)时差控制在100ns以内。
其溯源链路如图1-13所示,图中f1、f2、f3、f4分别为卫星发射和接收的频率信号。
2)北斗区域卫星导航系统。
北斗区域卫星导航系统是北斗卫星导航系统“三步走”战略的第二步,于2007年发射第一颗中圆地球轨道卫星,至2012年底共完成5颗GEO卫星、5颗IGSO卫星(两颗在轨备份)和4颗MEO卫星的发射,具备区域服务能力。2012年5月中国卫星导航系统管理办公室发布了《北斗卫星导航系统发展报告》2.0版。
① 北斗系统时间。
北斗卫星导航系统的时间基准为北斗时(BDT),BDT采用国际单位制(SI)秒为基本单位连续累计,不闰秒,起始历元为2006年1月1日协调世界时(UTC)00时00分00秒。BDT溯源到中国科学院国家授时中心(NTSC)保持的UTC时间,简称UTC(NTSC),与UTC之间的闰秒信息在导航电文中播报。BDT与UTC的偏差保持在100ns以内(模1s)。
② 北斗坐标系统。
北斗卫星导航系统的坐标框架采用中国2000大地坐标系统(CGCS2000)。
③ 北斗卫星导航系统区域服务的主要功能和性能指标如下:
a. 主要功能:定位、测速、单/双向授时、短报文通信;
b. 服务区域:中国及周边地区;
c. 定位精度:优于10m;
d. 测速精度:优于0.2m/s;
e. 授时精度:50ns;
f. 短报文通信:120个汉字/次。
3)北斗全球卫星导航系统。
作为中长期发展规划,我国将在2020年左右全面建成由30颗卫星组成的北斗卫星导航系统,形成全球服务能力,北斗卫星导航系统对外称为BDS或COM-PASS,BDS星座图如图1-14所示。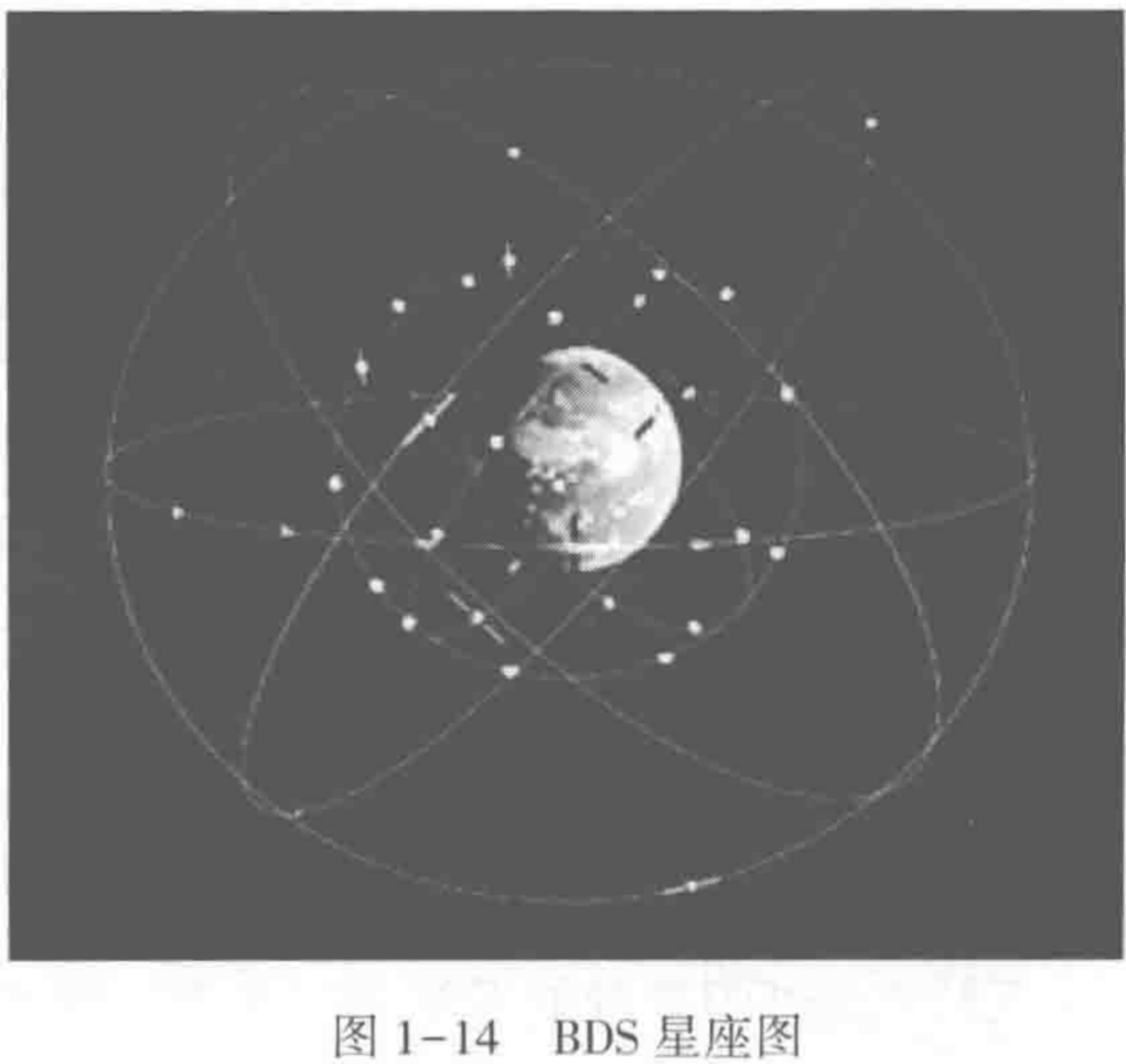
1.2.4.3 中国区域卫星授时系统
中国区域卫星授时系统(CAPS)是采用在轨的通信卫星的转发器作为中继,将地面生成的测距码和导航电文数据转发给用户,用户被动接收转发后的信号,实现导航、定位和授时功能。CAPS系统原理如图1-15所示。
2003年,中国科学院有关研究所提出了建设CAPS的建议书,得到国家科技部、总装备部和中国科学院的立项批准。CAPS系统与北斗区域导航系统两者共同构成中国第二代卫星导航系统。北斗全球系统的信号体制等关键技术目前正在利用CAPS进行试验和验证。
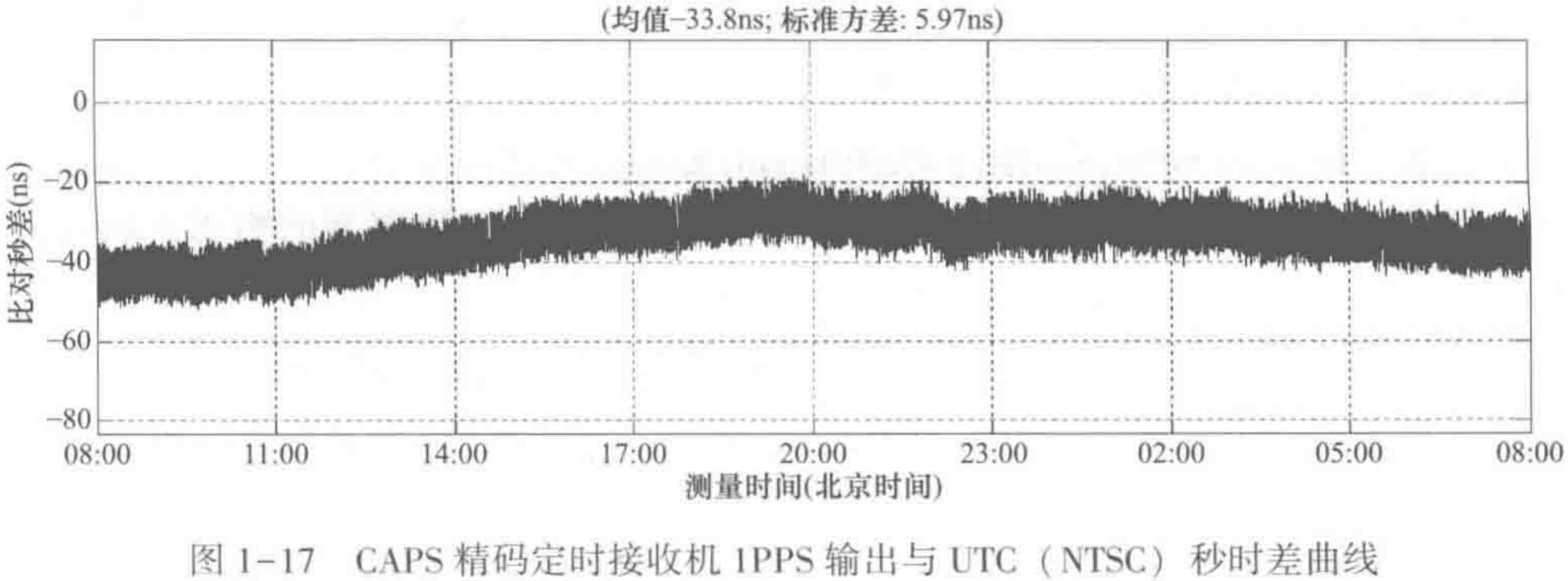
CAPS系统是利用我国现有的通信卫星资源,自行研究、自己控制、拥有自主知识产权的军民两用的具有卫星导航、定位、授时、测速功能的应用卫星系统。与世界上所有的GNSS系统一样,CAPS系统由空间段、地面段和用户段三大部分组成。CAPS系统利用在轨GEO通信卫星转发器作为主用导航基准源,辅以地面系统,实现用户被动定位、定时和测速。CAPS定位精度与GPS早期水平相当。粗码定时接收机定时精度优于20ns;精码定时接收机定时精度优于10ns。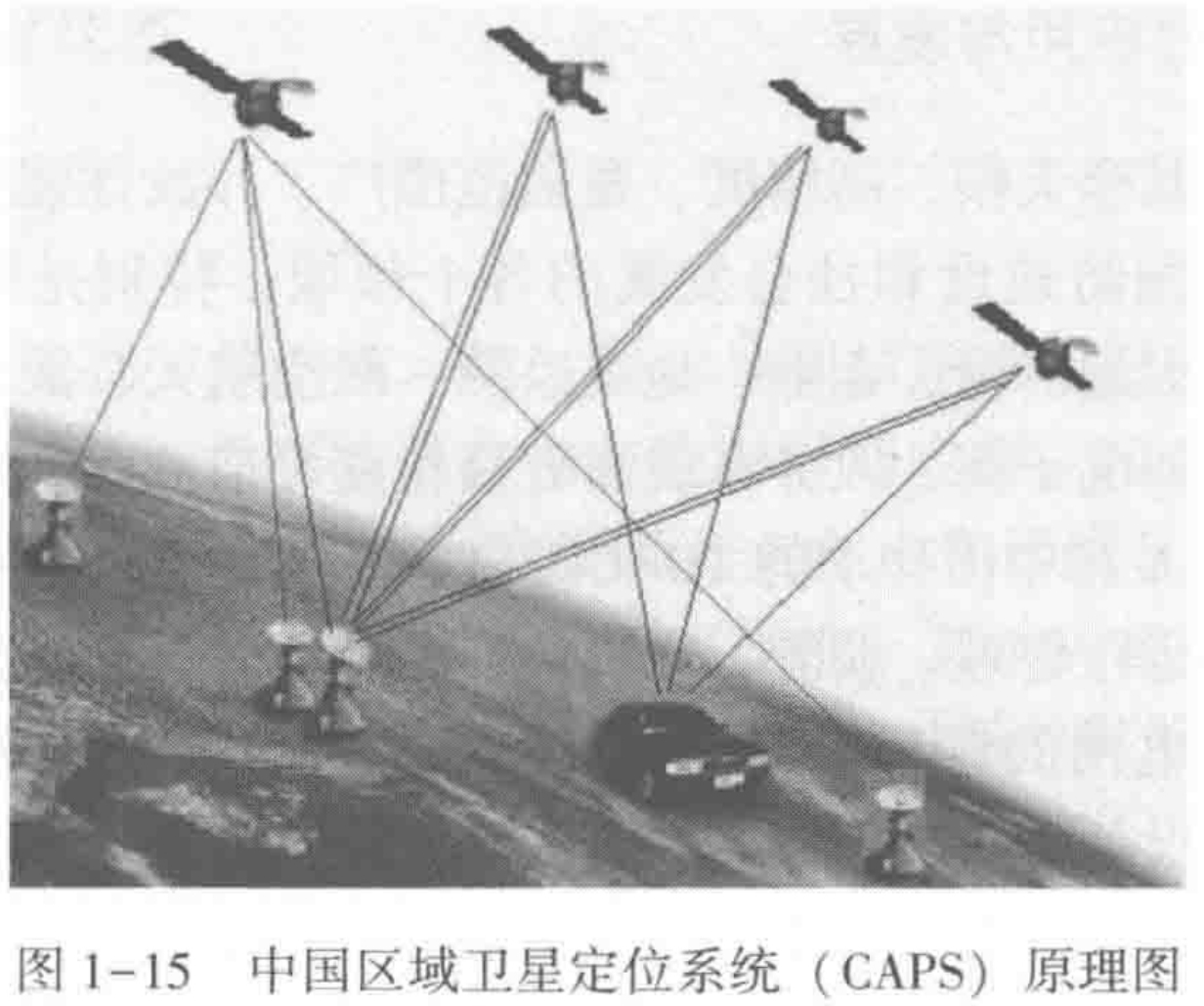 CAPS粗码定时接收机输出的秒信号(IPPS)输出与UTC(NTSC)秒时差曲线如图1-16所示;CAPS精码定时接收机IPPS输出与UTC(NTSC)秒时差曲线如图1-17所示。
CAPS粗码定时接收机输出的秒信号(IPPS)输出与UTC(NTSC)秒时差曲线如图1-16所示;CAPS精码定时接收机IPPS输出与UTC(NTSC)秒时差曲线如图1-17所示。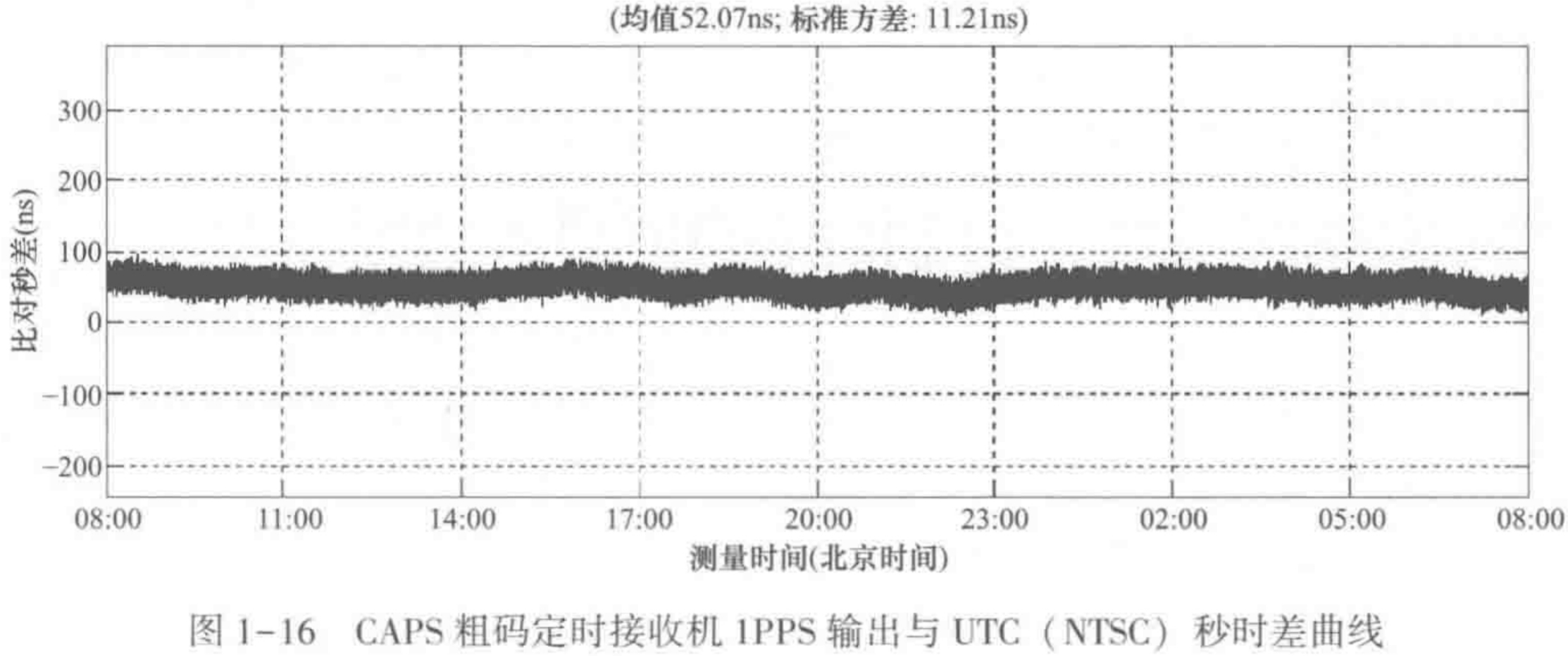
1.2.4.4 卫星授时应用与发展
卫星授时由于其全天候、高精度、覆盖范围广、开放性强等特点,可以应用于国民经济建设、国防建设和社会发展的各个领域,特别是科学研究、交通运输、电力、通信、大地测量、金融、地震监测、航空航天、武器试验等行业的高精度时间同步。例如电子商、政务系统需要高精度可信的时间同步;通信领域中国联通电信的CDMA和中国移动的TD-CDMA网络都采用卫星授时的方法实现同步;交通领域机场运行管理、航空、飞机调度、动车、高铁运控和调度管理需要高精度时间同步;电网的运行、管理、运动和故障分析系统需要高精度时间同步,电力系统终端设备如故障录波器、时间顺序记录装置需要高精度时间,电力系统的变电站需要高精度时间同步;现代金融行业,无论银行或证券交易所,银行业务往来的发生时刻、金融交易的准确时刻、E-MAIL信息、文件创建和访问时间、数据库处理时间、银行卡/账户的密码识别等,都涉及银行联网计算机之间的时间同步和频率同步;医疗行业,电子病例的签署、时间戳的标注等需要高精度时间同步。随着科学技术的发展,特别是通信技术和网络技术的发展,对授时应用提出了更高的要求,也为卫星授时系统提供了更为广阔的发展机遇。
在2013年之前,国内时间用户主要采用GPS定时终端实现时间同步和高精度卫星定时,随着我国北斗区域卫星导航系统的建设和运行,北斗卫星授时产品的研发得到了极大的发展,在国家北斗卫星导航产业化政策的推动下,民用北斗卫星导航、定时终端和高端北斗卫星导航、定时终端的研究研制及产业化应用得到了迅猛发展,目前市场上的北斗卫星导航、定时终端的性能和价格已经可以与GPS产品相媲美,2016年中国长沙第七届导航年会上,中国北斗产品的强大阵容充分佐证了这一点。
随着全球卫星导航技术的发展,未来卫星授时领域发展趋势如下:
(1)随着全球卫星导航系统的建设和发展,尤其是北斗全球卫星导航系统的建设、运行,卫星导航、定时产品将朝着多系统融合的趋势发展。BDS/GPS、GPS/GLONASS双模终端、BDS/GPS/GLONASS、BDS/GPS/GLONASS/GALILEO多模融合终端将得到用户市场的青睐。
(2)随着美国GPS现代化、欧洲GALILEO系统的快速发展和北斗系统的完善,用户对GNSS系统的定时精度、可用性和可靠性将提出更高的需求,因此高精度、高可用性和可靠性将是GNSS用户终端的发展趋势。
(3)卫星授时应用除了在国防建设和国民经济建设领域诸如交通运输、电力系统、移动通信等领域应用外,还将在互联网、电子商务、金融、证券、保险、智能交通、医疗、精准农业等领域得到广泛的应用,为卫星导航产业带来空前的发展机遇。
1.2.5 其他授时技术
1.2.5.1 电视授时
利用模拟广播电视节目中插入的时频信号和信息进行时间同步和频率校准,是一种廉价可行的手段,此项技术首先在欧洲得到应用。20世纪80年代,中国科学院国家授时中心(原中国科学院陕西天文台)和国家计量院共同制定了我国模拟广播电视信号插入的时频信号的国家标准,其编码格式如图1-18所示。数字电视信号播发后,利用数字电视帧头传递标准时间的秒脉冲信号,在数字电视的预置位加入标准时间信息,从而利用数字电视进行授时,其授时精度可以达到微秒量级。
今天,模拟广播电视制式已经逐渐被淘汰,而基于数字广播电视制式的电视授时技术正处于研发阶段,面对林林总总的数字电视制式,国内有关研究机构正在开展基于数字广播电视制式的授时方法研究,中国科学院国家授时中心与江苏省电视台开展了基于卫星的数字电视制式的授时与时间同步试验,得到的定时不确定度优于50ns。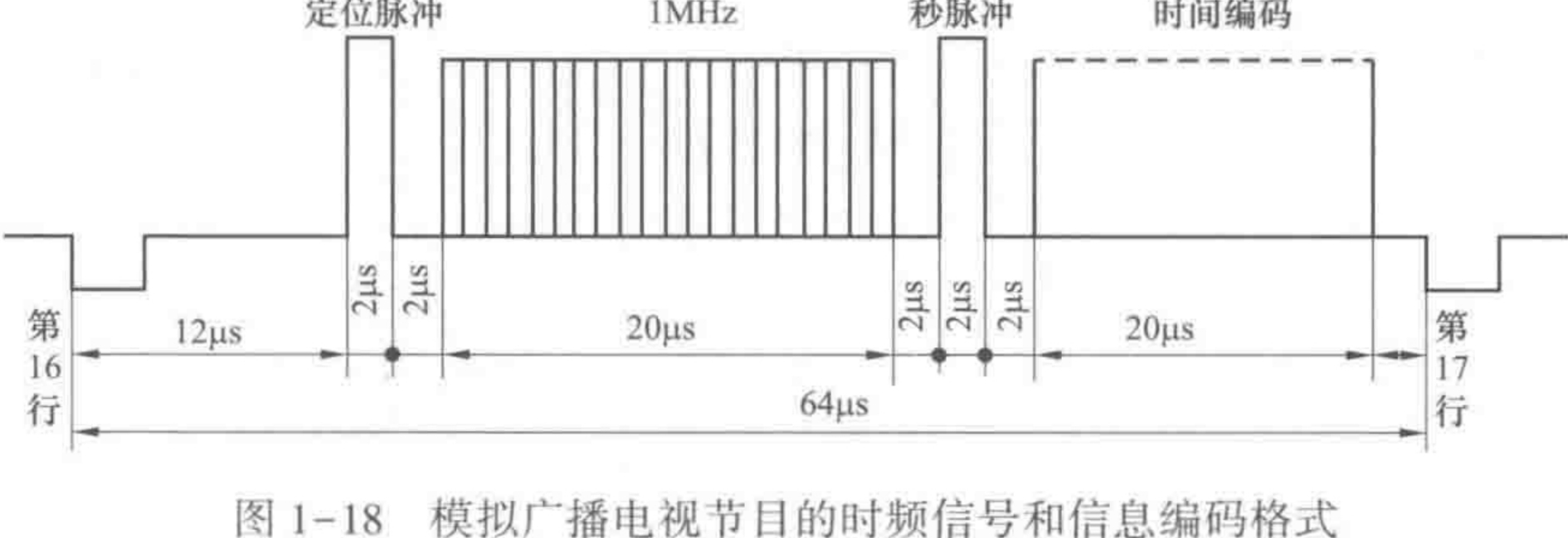
1.2.5.2 电话授时
电话授时又称为电话时间服务,目前较为常见的主要有两种类型:一种是专用电话定时设备,只要有一根与电话网相连接的电话线、一个调制解调器和一个电话授时终端,用户就可以通过普通电话线得到时间服务;另一种是计算机电话时间服务系统,在国外有时也被称为Automated Computer Time Service(ACTS)。使用这一服务,用户只需要一个调制解调器、电话线和简单的软件,就可以通过电话线使计算机的时钟与时间服务器的时钟同步。
利用双音频电话拨号音也可实现电话授时,电话授时时间传递精度在毫秒量级。
1.2.5.3 网络授时
利用网络传送标准时间信息,可为联网计算机实现时间同步,称为网络授时。网络授时始于20世纪80年代后期,随着互联网应用的普及,在90年代得到迅速发展。
现行的网络授时协议包括网络时间协议(network time protocol,NTP)和精确时间同步协议(precision time protocol,PTP)。
(1)NTP协议。
NTP协议有三种工作模式:对等模式(Symmetric)、广播模式(Multicast)和客户机/服务器模式(Client/Server)。较为常用的是客户机/服务器模式,在该模式下,其基本校时原理是客户机首先向服务器发送一个NTP包,其中包含了该包离开客户机时的时间戳T1。当服务器接收到该包时,依次填入包到达时的时间戳T2、交换包的源地址和目标地址、填入包离开时的时间戳T3,然后立即把包返回给客户机。客户机在接收到响应包时,填入包回到客户机的时间戳T4。
客户机用以上这四个时间戳就能够计算出两个关键的定时参数:
1)包交换的往返延迟d;
2)客户机滞后服务器的时钟偏移q。
NTP授时交互流程如图1-19所示。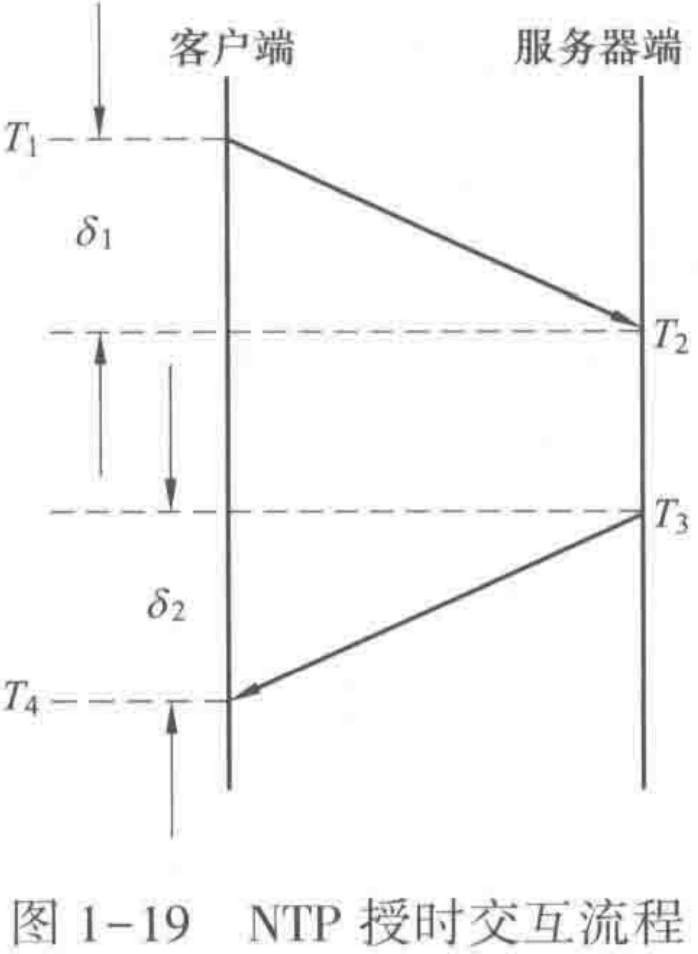
假设发送请求和响应请求在以太网上传播的时间相同,即δ1=δ3,则可以计算出:
d = (T2 - T1) + (T4 - T3)
q = [(T2 - T1) - (T4 - T3)]/2
通过求得的偏差q可以校正客户机的时钟。
NTP网络授时协议的授时精度:
1)软件NTP协议:10、100ms;
2)硬件NTP协议:ns、μs量级。
(2)PTP协议。
IEEE 1588是国际电联(ITU)推荐的网络精密时钟同步协议,简称PTP协议,在IEEE 1588协议框架下系统内主从时钟可达到亚微秒范围内的同步精确度,而且还存在提高精度的潜力。它适用于那些需要实现最高精确度分布时钟的时间同步的有限网络领域。
IEEE 1588要求网络中的每个节点必须有一个硬件实时时钟,以实现基于PTP协议栈的相关服务。从通信关系上把时钟分为主时钟和从时钟两种,理论上任何时钟都能实现主时钟和从时钟的功能,但一个PTP通信子网内只能有一个主时钟。整个系统中的最优时钟为最高级时钟(Master),有着最好的稳定性、精确性。由最优主时钟算法(Bestmaster Clock)自动选择各子网内的主时钟,从时钟与主时钟保持同步。
同步过程分为两步,第一步偏移测量,第二步延迟测量。
1)偏移测量:偏移测量原理如图1-20所示。偏移测量阶段,修正主时钟和从时钟的时间差。在偏移修正过程中,主时钟周期性发出一个确定的同步信息(简称Sync信息,一般为每两秒一次),它包含了一个时间戳(time stamp),精确地描述了数据包发出的预计时间,如图1-20所示,假设同步之前主时钟的时间为TM=1050s,而从时钟的时间为TS=1000s。主时钟测量出发送的准确时间TM1,而从时钟测量出接收的准确时间TS1。由于信息包含的是预计的发出时间而不是真实的发出时间,所以主时钟在Sync信息发出后发出一个Follow_Up信息,该信息加了一个时间戳,准确地记录了Sync信息的真实发出时间TM1。这样一来,从属时钟使用Follow_Up信息中的真实发出时间和接收方的真实接收时间,可以计算出从属时钟与主时钟之间的偏移(Offset):
Offset=TS1-TM1-Delay(1-9)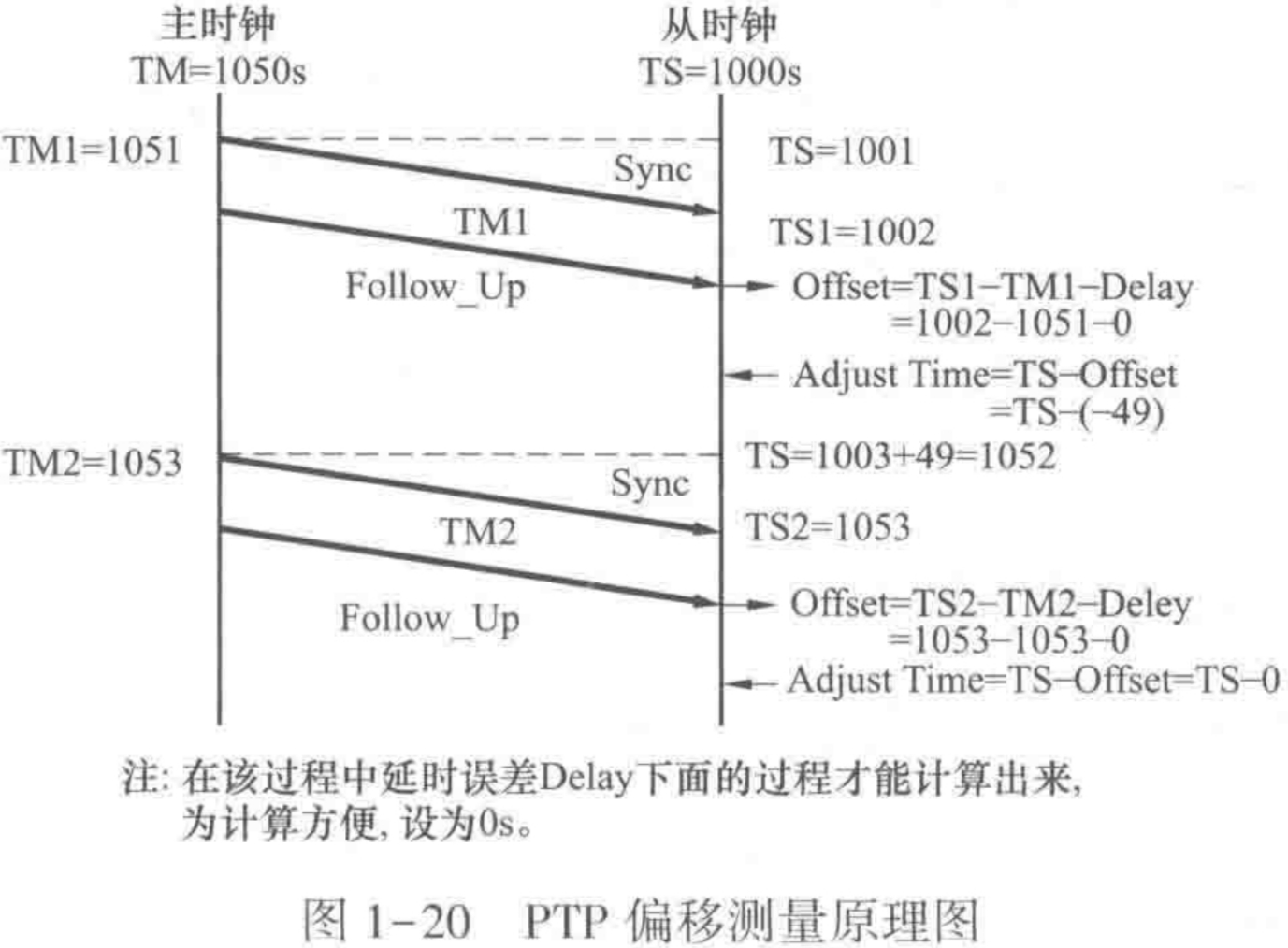
2)延迟测量:延迟测量原理如图1-21所示。延迟测量(delay measure-ment)阶段用来测量网络传输造成的延迟时间。为了测量网络的传输延时,IEEE 1588定义了一个延迟请求信息包(Delay Request Packet),简称Delay_Req。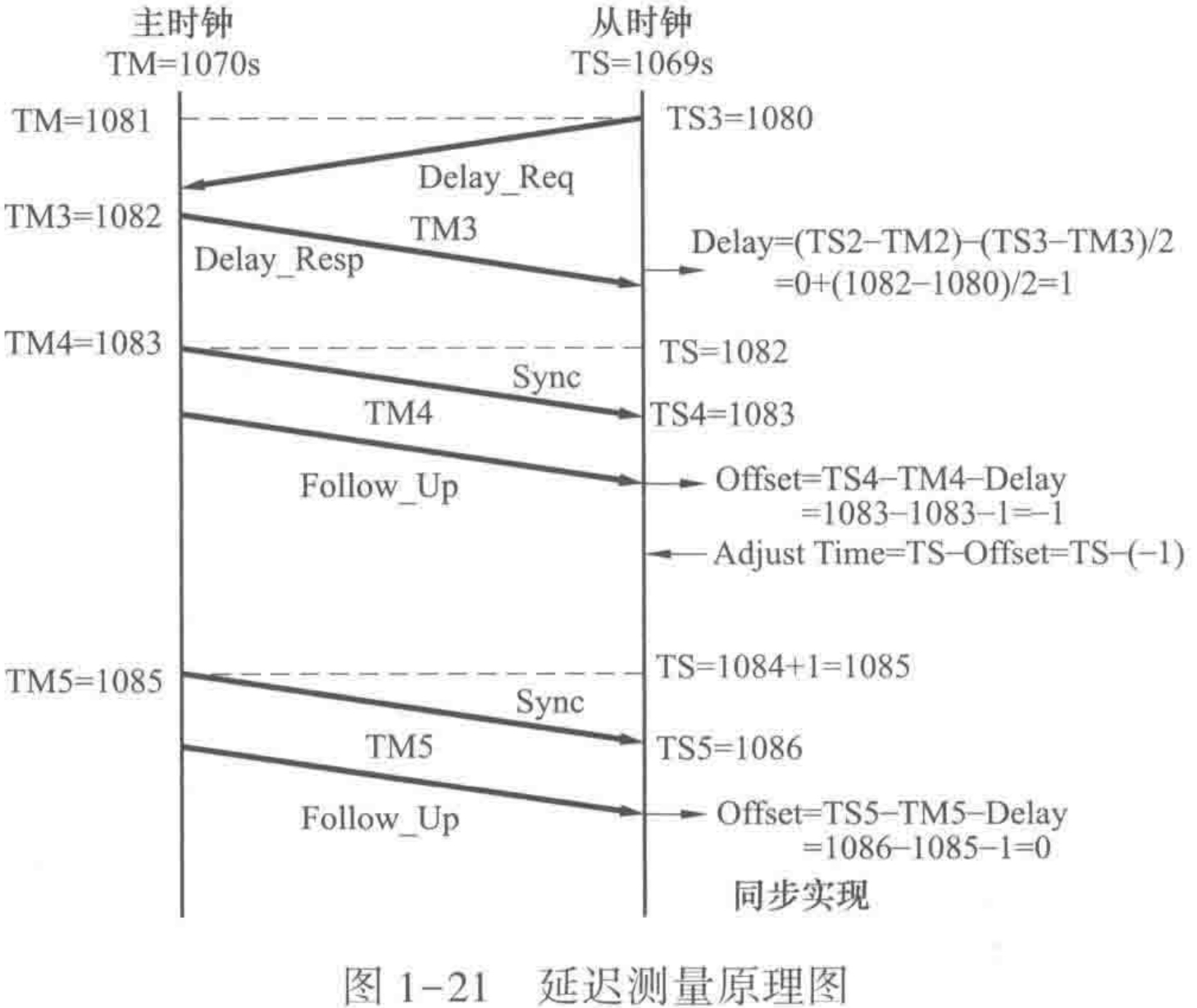
如图1-21所示,从时钟在收到Sync信息后在TS3时刻发出延迟请求信息包Delay_Req,主时钟收到Delay_Req后在延迟响应信息包(Delay Response Packet,Delay_Resp)印章出准确的接收时间TM3,并发送给从时钟,因此从时钟就可以非常准确地计算出网络延时:
TM2-TS2: Delay1=TS2-TM2+Offset(1-10)
TS3-TM3: Delay2=TM3+Offset-TS3 (1-11)
因为网络延迟时间是对称相等的,所以:
Delay=Delay1+Delay2(1-12)
与偏移测量阶段不同的是,延迟测量阶段的延迟请求信息包是随机发出的,并没有时间限制。需要说明的是在这个测量过程中,假设传输介质是对称均匀的。如图1-21所示,经过同步信息的交换,从时钟与主时钟实现了精确同步。PTP网络定时协议定时精度视网络状态而定,一般为几十纳秒~几十微秒。
1.2.6 各种授时方法比较
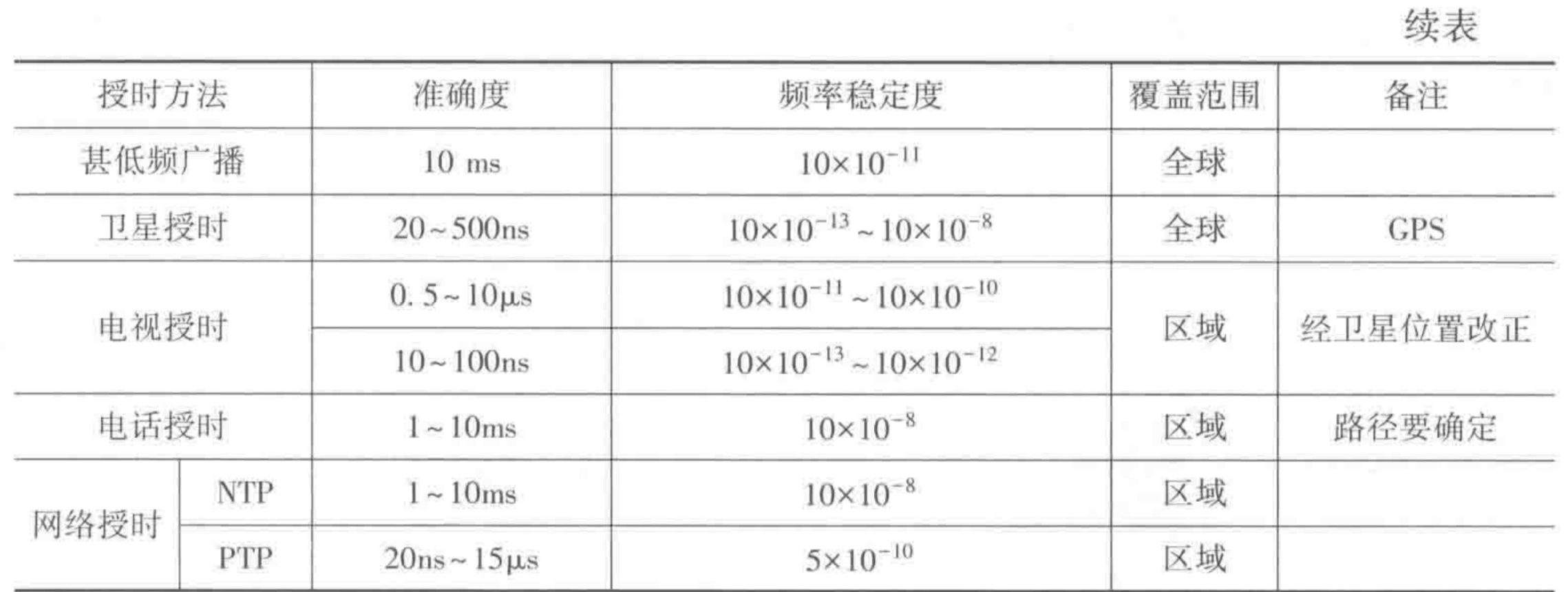
现行的各种授时方法对比如表1-3所示。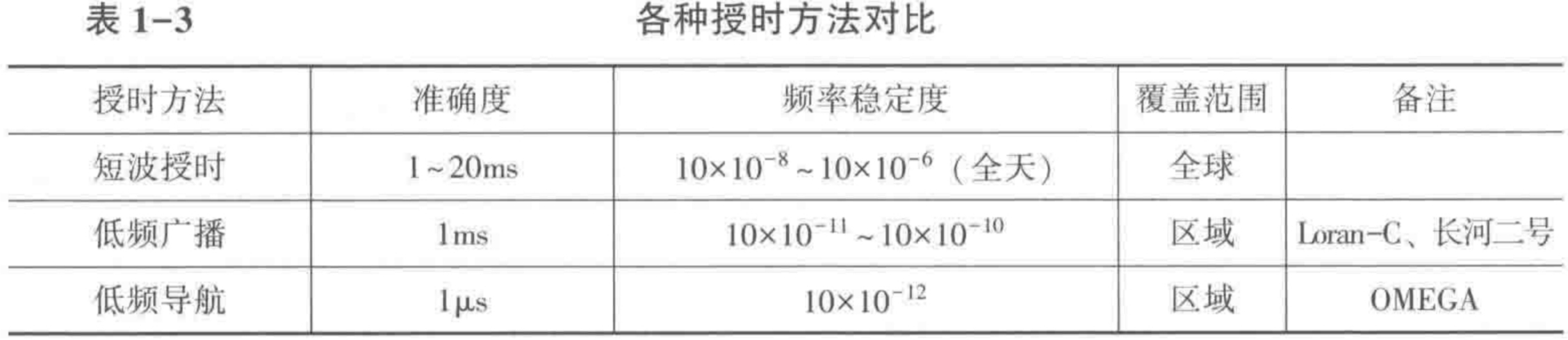
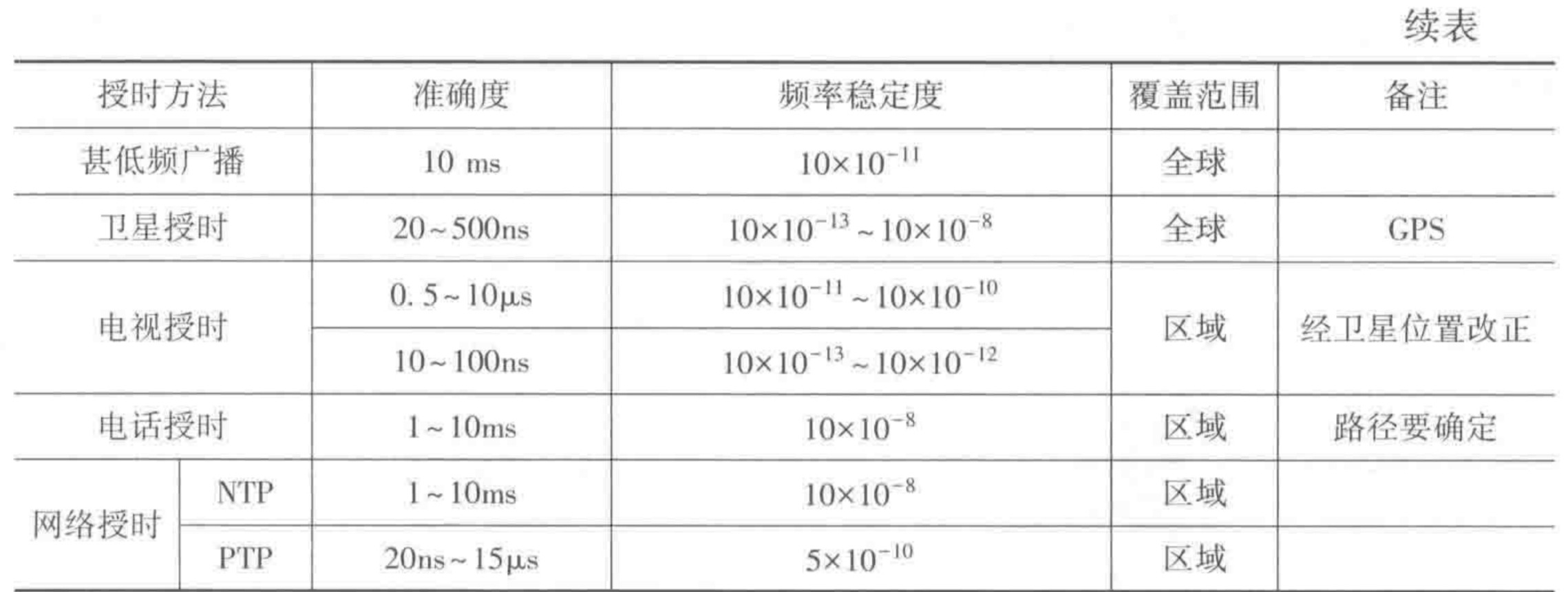 由表1-3可以看出,卫星授时具有授时精度高、覆盖范围广、开放性强等特点,目前在我国国民经济发展中发挥着重要作用,尤其是在国防、电力、交通、大地测量等领域的应用越来越广泛,所以研究卫星授时,尤其是我国的北斗卫星授时,从而摆脱GPS独占市场对我国各行各业的桎梏,是目前国内授时技术研究的热点。短波和长波授时虽然授时精度、覆盖范围不及卫星授时,但也是我国民基无线电授时的互补,在我国国民经济发展和国防建设中同样发挥着重要作用。
由表1-3可以看出,卫星授时具有授时精度高、覆盖范围广、开放性强等特点,目前在我国国民经济发展中发挥着重要作用,尤其是在国防、电力、交通、大地测量等领域的应用越来越广泛,所以研究卫星授时,尤其是我国的北斗卫星授时,从而摆脱GPS独占市场对我国各行各业的桎梏,是目前国内授时技术研究的热点。短波和长波授时虽然授时精度、覆盖范围不及卫星授时,但也是我国民基无线电授时的互补,在我国国民经济发展和国防建设中同样发挥着重要作用。