ADS学习笔记(二) 交流小信号仿真
参考书籍:见资源绑定,书籍3.3交流仿真
ADS2020版本实验步骤参考链接:https://mp.weixin.qq.com/s/uW13gTap-VNAyOot9g8CEw
本文为对实验内容的补充
反馈放大器的相位裕度
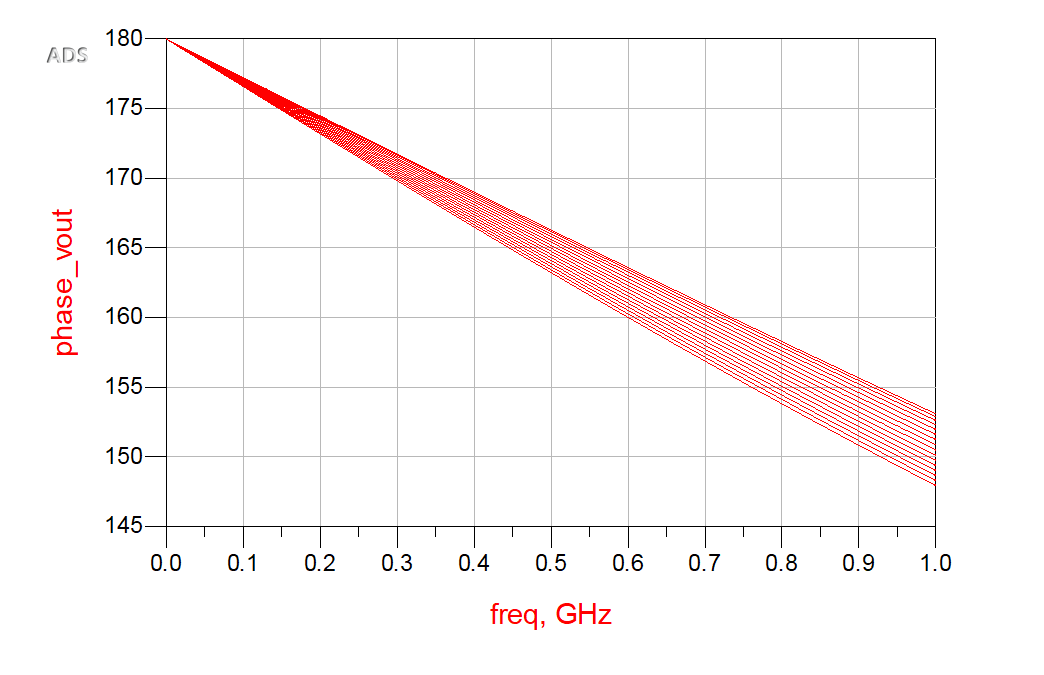
如下图所示,在矩形图中添加输出信号的相位曲线,可见随着放大器工作频率增加,放大器电路的相位逐渐下降。只有当增益下降为 0dB 时,相位仍有 60°以上,我们才认为该放大器是稳定工作的。
为什么当增益下降为 0dB 时,相位仍有 60°以上,我们才认为该放大器是稳定工作的?
这涉及到反馈放大器稳定性的一个核心概念——相位裕度 (Phase Margin)。
这里的“相位仍有60°以上”指的是相位裕度 (Phase Margin, PM) 大于或等于60°。下面详细解释为什么这个条件对判断放大器稳定性如此重要:
-
反馈与环路增益 (Loop Gain)
放大器通常采用负反馈来改善性能(如稳定增益、减小失真、改变输入输出阻抗等)。在负反馈系统中,稳定性由环路增益(通常表示为 Aβ,其中 A 是放大器的开环增益,β 是反馈网络的反馈系数)的特性决定。 -
振荡条件 (Barkhausen Criterion)
一个负反馈系统会变得不稳定并产生振荡,如果满足以下条件:- 环路增益的幅值 |Aβ| ≥ 1 (即 ≥ 0dB)。
- 环路增益引入的总相移使得反馈信号与输入信号同相,从而形成正反馈。对于初始设计为负反馈的系统,这意味着环路增益 Aβ 自身需要引入额外的 -180° (或 +180°, 或其奇数倍) 的相移。
-
0dB 增益频率 (Unity Gain Frequency)
这是指环路增益的幅值 |Aβ| 恰好等于 1 (即 0dB) 时的频率。这个频率点对于稳定性分析至关重要。 -
相位裕度 (Phase Margin, PM)
- 定义:相位裕度是在环路增益的幅值下降到 1 (0dB) 的频率点(即0dB增益频率),环路增益的实际相位与导致振荡的临界相位(通常是-180°)之间的差值。
- 公式:PM = (环路增益在0dB频率点的相位) - (-180°)。
- 因此,当说“相位仍有60°以上”时,实际上是指在这个0dB增益频率点,系统的相位裕度 PM ≥ 60°。这意味着,环路增益的实际相位至少比-180°“好”了60°,例如,实际相位是 -120° (因为 -120° - (-180°) = 60°)。
-
为什么需要相位裕度 (PM > 0°)
- 如果 PM = 0°,系统恰好处于振荡的临界点。
- 如果 PM < 0°,系统是不稳定的,会发生振荡。
- 因此,为了保证稳定工作,相位裕度必须大于0°。
-
为什么推荐相位裕度 ≥ 60° (或常见的45°- 60°范围)
仅仅大于0°的相位裕度虽然能保证理论上的稳定,但在实际应用中远远不够。推荐一个较大的相位裕度(如 ≥ 60°)主要基于以下原因:
-
保证足够的稳定性余量:
* 实际电路中的元器件参数(如电阻、电容、晶体管的特性)都存在一定的制造容差。
* 元器件参数会随温度变化(温漂)和时间(老化)而改变。
* 放大器的负载条件也可能发生变化。
所有这些因素都可能影响环路增益的幅度和相位特性。一个较大的相位裕度可以容忍这些不确定性,确保放大器在各种实际工作条件下都能保持稳定,而不会意外地进入振荡状态。 -
获得良好的瞬态响应特性:
相位裕度直接影响放大器对输入信号阶跃变化的响应(瞬态响应):
* PM 较小 (例如 < 30°):系统虽然可能稳定,但非常接近不稳定边缘。其阶跃响应通常会表现出显著的过冲 (overshoot) 和长时间的振铃 (ringing),这是不希望看到的。
* PM 适中 (例如 45° - 60°):系统具有良好的阻尼特性。阶跃响应的过冲较小,振铃得到有效抑制,信号能够较快地稳定下来。60°的相位裕度通常对应于一个阻尼比较理想的二阶系统(大约 ζ ≈ 0.6 − 0.7 \zeta \approx 0.6-0.7 ζ≈0.6−0.7),这在响应速度和稳定性之间取得了很好的平衡。
* PM 过大 (例如 > 75°-90°):系统可能会过于阻尼,导致响应速度变慢,上升时间变长。 -
设计经验和鲁棒性:
将相位裕度设计在60°左右是一个广泛接受的工程实践,它旨在构建一个不仅稳定,而且在各种扰动下表现鲁棒(robust)的放大器。
个广泛接受的工程实践,它旨在构建一个不仅稳定,而且在各种扰动下表现鲁棒(robust)的放大器。