【MPC控制 - 从ACC到自动驾驶】1 ACC系统原理与MPC初步认知
【MPC控制 - 从ACC到自动驾驶】ACC系统原理与MPC初步认知
欢迎来到博客专栏【MPC控制 - 从ACC到自动驾驶】!在接下来的系列文章中,我将带领大家从一个我们日常生活中越来越常见的功能——自适应巡航控制(ACC)入手,逐步揭开模型预测控制(MPC)这个强大控制算法的神秘面纱,并最终展望其在自动驾驶领域的核心应用。
今天,作为我们万里长征的第一步,我们将聚焦于两个核心问题:ACC系统到底是什么?它又是如何工作的?以及,初识MPC,它又是一种怎样的控制思想?准备好了吗?让我们一起发车,驶向控制科学的奇妙世界!
自适应巡航控制(ACC):不止是定速巡航那么简单
提到巡航控制,大家可能首先想到的是传统的定速巡航(Cruise Control, CC)。设定一个速度,车辆就自己保持这个速度跑,确实省心。但是,如果前方突然出现一辆慢车,或者有车并线进来,传统的CC就无能为力了,司机必须立刻接管,踩刹车减速。这在车流量较大的路况下,不仅没减轻负担,反而可能因为频繁切换而更累。
于是,更智能的“自适应巡航控制”(Adaptive Cruise Control, ACC)应运而生。它就像给传统的CC装上了一双“眼睛”(通常是雷达或摄像头)和更聪明的“大脑”。
ACC是什么?解放你双脚的智能跟车系统
简单来说,ACC是一种先进的驾驶辅助系统(ADAS),它允许车辆在巡航时自动调整车速,以保持与前方车辆的预设安全距离。当前方没有车辆时,ACC系统会按照驾驶员设定的期望速度行驶,就像传统的定速巡航一样。一旦检测到前方有车辆,ACC会自动减速,与前车保持安全距离,并跟随前车行驶。如果前车加速或驶离,ACC也会自动加速至设定的巡航速度。

想象一下,在畅通的高速公路上,你开启ACC,设定好100公里/小时的速度和合适的跟车距离。这时,你可以适当放松紧绷的神经,双脚也不再需要在油门和刹车之间频繁切换。如果前方车辆速度是80公里/小时,你的车会自动降速到80公里/小时并保持安全距离跟随。如果前车提速到110公里/小时,你的车也会跟着提速,直到达到你设定的100公里/小时上限或再次因前车限速。这种“自适应”的能力,极大地提升了驾驶的舒适性和安全性,尤其在长途高速驾驶和中等拥堵的路况下,效果尤为显著。
ACC的核心控制目标:速度与距离的智慧平衡
ACC系统的核心任务可以归纳为两种主要的工作模式,系统会根据交通状况自动在这两种模式间切换:
-
速度控制模式 (Speed Control Mode):
- 触发条件: 当ACC系统启动,且前方没有探测到目标车辆,或者前方车辆的距离远大于设定的安全距离,且其速度也高于或等于本车设定巡航速度时。
- 控制逻辑: 系统控制车辆加速或减速,以达到并维持驾驶员设定的期望巡航速度 v s e t v_{set} vset。此时,ACC的行为就和传统的定速巡航系统一样。
-
距离控制模式 (Distance Control Mode / Following Mode):
- 触发条件: 当ACC系统探测到前方车道内有行驶的车辆,并且该车距离小于某个阈值(或者说,需要开始进行距离保持)。
- 控制逻辑: 系统控制车辆自动调整车速,使其与前方车辆保持一个预设的“安全距离” d s a f e d_{safe} dsafe。同时,本车的速度 v e g o v_{ego} vego 通常不会超过驾驶员设定的巡航速度 v s e t v_{set} vset,即 v e g o ≤ v s e t v_{ego} \le v_{set} vego≤vset。如果前车减速,本车也相应减速;如果前车加速,本车也加速(但不会超过 v s e t v_{set} vset)。
这两种模式的智能切换和精准控制,是ACC系统区别于传统CC的关键。它不再是简单的“保持速度”,而是进化为“在安全的前提下,尽可能舒适地保持速度或跟随前车”。
ACC的应用场景与重要性:迈向更轻松、更安全的驾驶
ACC系统的应用场景非常广泛,尤其在以下情况中能发挥巨大作用:
- 高速公路巡航: 这是ACC最经典的应用场景。长时间、长距离的匀速或变速行驶,ACC能显著减轻驾驶员的疲劳感。
- 中等拥堵路况: 在车流走走停停但不至于完全堵死的情况下,ACC(尤其是带有停走功能的ACC,即ACC Stop & Go)能够自动跟车,减少了驾驶员频繁的油门刹车操作。
- 长途驾驶: 对于职业司机或节假日出行的家庭,ACC能有效提升驾驶舒适度,让旅途更轻松。
ACC的重要性不仅在于提升舒适性,更在于其对主动安全的贡献:
- 预防追尾: 通过始终保持安全距离,ACC能有效降低因驾驶员分神或判断失误导致的追尾风险。
- 更平顺的交通流: 当多辆车都使用ACC时,车辆间的速度调整会更加平滑,有助于形成更稳定、高效的交通流,减少不必要的急加速和急减速。
- 驾驶员辅助: 它作为一种高级驾驶辅助系统,是汽车智能化、自动化发展道路上的重要里程碑,为更高级别的自动驾驶技术(如L2、L3级自动驾驶)奠定了基础。
可以说,ACC已经从豪华车的专属配置,逐渐下沉到更多经济型车型,成为衡量车辆智能化水平的一个重要指标。它的普及,正在悄无声息地改变着我们的驾驶习惯和出行体验。
安全距离模型:ACC如何判断“安全”?
我们一直在说ACC要保持“安全距离”,那么这个“安全距离”到底是怎么计算出来的呢?总不能是驾驶员凭感觉随便设一个吧?当然不是。ACC系统内部有一套精确的数学模型来定义和计算这个动态的安全距离。其中,最常用也最经典的一种策略叫做“恒定时距”(Constant Time Headway, THW)策略。
恒定时距(THW)策略:给反应留足时间
“时距”(Time Headway)这个概念,指的是本车车头到达前车车尾当前所在位置所需的时间。如果这个时间太短,一旦前车紧急刹车,后车很可能没有足够的反应时间和制动距离而发生追尾。
恒定时距(THW)策略的核心思想就是:无论车速快慢,本车与前车之间都应该保持一个固定的时间间隔。 这样一来,当车速较快时,对应的安全距离就会自动变大;当车速较慢时,安全距离也会相应减小。这非常符合我们的驾驶直觉和安全需求。
THW策略计算安全距离 d s a f e d_{safe} dsafe 的经典公式如下:
d s a f e ( k ) = d 0 + T h w ⋅ v e g o ( k ) d_{safe}(k) = d_0 + T_{hw} \cdot v_{ego}(k) dsafe(k)=d0+Thw⋅vego(k)
这里的符号代表:
- d s a f e ( k ) d_{safe}(k) dsafe(k): 在当前时刻 k k k(或者说,在下个控制周期计算出的期望)的安全距离。
- d 0 d_0 d0: 这是一个固定的距离,代表零速或者极低速时的最小安全距离(可以理解为车辆静止时,你希望与前车保持的最小间隙,比如几个车身的长度)。它是一个常数,由汽车制造商根据法规和安全冗余设定。
- T h w T_{hw} Thw: 这就是“恒定时距”值,单位是秒(s)。它代表了驾驶员的反应时间加上一定的安全冗余时间。通常这个值会在1到3秒之间选取,例如1.5秒、2.0秒等。这个值也是由驾驶员在ACC设置中选择(通常是分几档,如“近”、“中”、“远”),或者由系统预设。
- v e g o ( k ) v_{ego}(k) vego(k): 本车在当前时刻 k k k 的实际速度。

举个例子,融会贯通一下:
假设我们设定 d 0 = 5 d_0 = 5 d0=5 米 (车辆静止时希望保持5米距离), T h w = 2.0 T_{hw} = 2.0 Thw=2.0 秒 (选择了一个2秒的时间间隔)。
- 如果你的车速 v e g o v_{ego} vego 是 0 公里/小时 (即静止),那么 d s a f e = 5 米 + 2.0 秒 ⋅ 0 米/秒 = 5 米 d_{safe} = 5 \text{米} + 2.0\text{秒} \cdot 0 \text{米/秒} = 5 \text{米} dsafe=5米+2.0秒⋅0米/秒=5米。
- 如果你的车速 v e g o v_{ego} vego 是 36 公里/小时 (即 10 米/秒),那么 d s a f e = 5 米 + 2.0 秒 ⋅ 10 米/秒 = 5 + 20 = 25 米 d_{safe} = 5 \text{米} + 2.0\text{秒} \cdot 10 \text{米/秒} = 5 + 20 = 25 \text{米} dsafe=5米+2.0秒⋅10米/秒=5+20=25米。
- 如果你的车速 v e g o v_{ego} vego 是 108 公里/小时 (即 30 米/秒),那么 d s a f e = 5 米 + 2.0 秒 ⋅ 30 米/秒 = 5 + 60 = 65 米 d_{safe} = 5 \text{米} + 2.0\text{秒} \cdot 30 \text{米/秒} = 5 + 60 = 65 \text{米} dsafe=5米+2.0秒⋅30米/秒=5+60=65米。
看到了吗?随着车速的增加,期望的安全距离 d s a f e d_{safe} dsafe 也随之线性增加。这就是THW模型的精髓所在——动态调整,确保安全。
参数的奥秘: d 0 d_0 d0 和 T h w T_{hw} Thw 的选取智慧
你可能会问, d 0 d_0 d0 和 T h w T_{hw} Thw 这两个参数是怎么来的呢?它们可不是随便拍脑袋定的。
-
d 0 d_0 d0 (零速最小安全距离): 这个值主要考虑的是车辆在极低速或静止时的物理空间需求,以及防止轻微碰撞和方便前车驶离等因素。一般会设定为几米到十几米不等。它更像是一个“保底”距离。
-
T h w T_{hw} Thw (时间间隔常数): 这是THW模型中更核心的参数。它的选取直接关系到跟车的“松紧程度”和安全性。
- 较小的 T h w T_{hw} Thw (例如1.0-1.5秒): 意味着跟车距离会比较近。在车流密集但速度不快的城市快速路,可能会有人喜欢这种设定,感觉更“跟得住”。但缺点是,留给驾驶员的反应时间和系统的制动冗余会更小,对系统快速响应能力要求更高。
- 较大的 T h w T_{hw} Thw (例如2.0-3.0秒): 意味着跟车距离会比较远。在高速公路上,或者对于驾驶风格比较保守的用户,这种设定会感觉更安全、更从容。但缺点是,在车流量大的时候,可能会容易被其他车辆“加塞”。
所以,很多ACC系统会提供几档不同的 T h w T_{hw} Thw 让驾驶员根据自己的偏好和路况进行选择,这通常对应着中控屏幕上的“跟车距离”设置(比如三格、四格显示)。
THW模型的动态特性:安全感的源泉
THW模型最值得称赞的一点就是它的动态适应性。安全距离不是一成不变的,而是随着本车自身速度 v e g o v_{ego} vego 的变化而实时调整。
- 速度快,距离远: 当你高速行驶时,一旦发生意外,需要的制动距离更长,驾驶员的反应时间(即使有系统辅助)也显得更为宝贵。THW模型通过增大 d s a f e d_{safe} dsafe,为你预留了足够的安全缓冲。
- 速度慢,距离近: 当你在市区低速跟车时,如果还保持高速时的巨大间距,不仅浪费道路资源,还容易被加塞,驾驶体验也不好。THW模型此时会自动减小 d s a f e d_{safe} dsafe,让跟车更紧凑、更自然。
这种动态特性,使得ACC系统能够在各种车速下都提供相对一致和可靠的安全保障,这也是它深受驾驶员喜爱的重要原因。当然,THW模型只是众多安全距离模型中的一种(尽管是最经典和广泛应用的一种)。更复杂的模型可能还会考虑前车速度 v l e a d v_{lead} vlead、道路曲率、天气状况等更多因素,但其核心思想都离不开为驾驶员和系统争取足够的反应时间和空间。
理解了ACC如何定义“安全”,我们才算真正走近了它的内心世界。接下来,我们将初步接触一个更为强大和通用的控制方法——模型预测控制(MPC),看看它又是如何为ACC这样的系统出谋划策的。
模型预测控制(MPC):深谋远虑的“智能驾驶员”
前面我们详细了解了ACC系统是什么,以及它如何通过THW模型来确定安全跟车距离。那么,具体如何控制车辆的油门和刹车,才能精确地达到这个目标(无论是保持速度还是保持距离)呢?这就需要一个聪明的“大脑”来做决策了,也就是控制器。
在ACC以及更广泛的自动驾驶领域,一种越来越受到青睐的控制策略就是模型预测控制(Model Predictive Control, MPC)。你可能在很多高端的技术文章或者自动驾驶的宣传中听过这个名词,感觉它非常高大上。别急,今天我们就来掀开它神秘面纱的一角,看看它的核心思想是什么。
MPC的基本思想:像下棋一样开车
想象一位优秀的棋手,他在走每一步棋之前,都会在脑海中预想接下来几步对手可能会怎么走,自己又有哪些应对策略,以及这些策略会导致什么样的局面。他会选择那个在未来几步内对自己最有利的走法。
MPC的控制方式与此非常相似,它不是只看眼前,而是具有“前瞻性”。其核心思想可以概括为以下几个关键步骤:
-
预测 (Prediction):
- 首先,MPC需要一个描述被控对象(比如我们的汽车)行为的数学模型。这个模型能够告诉我们,如果现在给汽车一个特定的油门或刹车指令,在接下来的一小段时间内,汽车的速度、位置等状态会如何变化。
- 基于这个模型和当前的车辆状态(比如当前车速、与前车的距离),MPC会“预测”未来一段时间内(比如未来几秒钟)车辆的行驶轨迹。它不仅仅预测一个点,而是预测一个时间序列上的状态。
-
优化 (Optimization):
- 光预测还不够,MPC的目标是让车辆的表现“最好”。什么是“最好”呢?这通常由一个“目标函数”或“代价函数”(Cost Function)来定义。这个函数会衡量预测的行驶轨迹与我们期望的轨迹(比如保持安全距离、达到设定速度)之间的差距,同时也会考虑控制指令本身是不是太剧烈(比如频繁急加速急刹车会不舒服)。
- MPC会在一个有限的未来时间窗口内(称为“预测时域”),尝试找到一系列“最优”的控制指令(比如未来几秒内每0.1秒应该给多大的加速度指令),使得这个目标函数的值最小。这本质上是在求解一个约束优化问题。
-
滚动/后退时域 (Receding Horizon / Rolling Horizon):
- 在找到这一系列“最优”的控制指令后,MPC并不会把它们全部执行。它只执行这一系列指令中的第一个(比如未来0.1秒的加速度指令)。
- 然后,在下一个控制时刻(比如0.1秒之后),系统会获得新的车辆状态测量值(可能因为扰动或模型不准,实际状态和预测的会略有偏差)。此时,MPC会重复上述的“预测”和“优化”过程,重新计算未来一段时间的最优控制序列,并再次只执行第一个指令。
- 这个过程就像滚动地平线一样不断重复:向前看一段(预测),走一小步(执行第一个控制),再向前看,再走一小步。这种“滚动优化”的方式使得MPC能够不断根据最新的系统状态和外部变化进行调整,具有很好的鲁棒性。
-
约束处理 (Constraint Handling):
- 现实世界中的控制系统总是有各种限制。比如,发动机的输出扭矩是有限的,所以车辆的加速度不可能无限大;刹车系统的能力也是有限的;我们可能还希望车辆的加速度变化不要太剧烈以保证舒适性。
- MPC的一大优势就是能够将这些“约束条件”(比如最大加速度、最小安全距离等)直接纳入到上述的“优化”问题中。这意味着MPC在寻找最优控制指令时,会自动确保这些指令是物理上可行的,并且不会违反我们设定的各种边界条件。
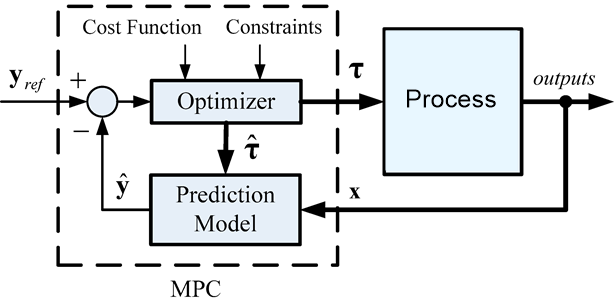
简单总结一下,MPC就像一个内置了导航和路况预测功能的“智能驾驶员”。它不断地观察(获取当前状态),思考(基于模型预测多种未来可能性),决策(优化选择最佳控制序列),然后行动(执行一小步),并持续这个循环。
MPC 与传统控制的初步对比:为什么需要MPC?
你可能会问,我们不是有经典的PID(比例-积分-微分)控制器吗?PID简单有效,在很多工业控制中都用得很好,为什么ACC还需要更复杂的MPC呢?
PID确实很棒,但它更像是一个“反应式”的控制器,主要根据当前的误差(比如实际速度与期望速度的差)来调整控制量。对于一些简单、线性的系统,PID效果很好。但对于像ACC这样需要考虑未来、处理多重目标和复杂约束的系统,MPC就显示出其独特的优势了:
- 前瞻性: PID是“向后看”(基于历史和当前误差),而MPC是“向前看”(预测未来),这使得MPC能更好地应对可预见的扰动(比如前方车辆的减速趋势)。
- 约束处理: PID很难直接处理控制量和输出量的约束(比如最大加速度、最小安全距离)。通常需要额外的逻辑(如抗饱和积分)来辅助,但不如MPC那样内在地、系统地处理约束。
- 多目标优化: ACC需要在安全、舒适、跟车精度等多个目标之间进行权衡。MPC通过其目标函数的设计,可以很自然地将这些不同的性能指标融合在一起进行综合优化。
- 多变量系统: 虽然我们这里主要讨论纵向控制,但车辆实际上是多输入多输出(MIMO)系统。MPC处理这类系统比传统SISO(单输入单输出)控制器(如多个独立的PID)更有优势,能更好地协调各个控制量。
当然,MPC也不是万能的。它对模型的精度要求较高,计算量也比PID大得多,这在早些年是其应用的一大瓶颈。但随着车载计算能力的飞速提升,MPC的实时计算已经不再是遥不可及的难题。
MPC的适用性:为什么ACC适合用MPC?
ACC系统之所以非常适合采用MPC,主要有以下几个原因:
- 需要预测未来: ACC的核心是保持与前车的安全距离并平稳行驶。前车的行为(加速、减速、切入切出)对本车有直接影响。MPC的预测能力可以帮助ACC系统预判前车可能的行为,并提前做出反应,而不是等事情发生了再被动调整,从而提高安全性和平顺性。
- 存在明确的性能指标和约束: ACC有明确的控制目标(跟踪设定速度、保持安全距离)和物理约束(车辆加减速能力、乘坐舒适性要求如加速度和加加速度限制、最小安全距离不能突破等)。MPC能够将这些目标和约束统一在优化框架内进行处理。
- 模型相对明确: 虽然真实的车辆动力学非常复杂,但用于ACC控制的纵向动力学模型可以进行合理的简化,并且模型的参数(如质量、阻力系数等)相对容易辨识或获取。这为MPC提供了可用的预测基础。
- 对平顺性要求高: ACC作为一项提升舒适性的功能,对控制过程的平顺性要求很高,不希望出现频繁的急加速或急刹车。MPC通过在目标函数中惩罚控制量的剧烈变化,或者直接约束控制量的变化率,可以有效地提升控制的平顺性和乘坐舒适度。
正是因为这些特性,MPC成为了实现高性能ACC系统,乃至更高级别自动驾驶功能的关键技术之一。它代表了一种更智能、更主动、更优化的控制思想。
今日小结与展望
好了,朋友们,我们今天“【MPC控制 - 从ACC到自动驾驶】”专栏的第一讲就到这里了。我们一起深入探讨了自适应巡航控制(ACC)的“前世今生”:
- 我们理解了ACC是如何工作的,它如何在速度控制和距离控制模式之间切换,为我们带来更安全、更舒适的驾驶体验。
- 我们学习了经典的恒定时距(THW)安全距离模型,知道了ACC是如何通过 d s a f e ( k ) = d 0 + T h w ⋅ v e g o ( k ) d_{safe}(k) = d_0 + T_{hw} \cdot v_{ego}(k) dsafe(k)=d0+Thw⋅vego(k) 这个公式来动态计算与前车的安全距离的。
- 最后,我们初步认识了模型预测控制(MPC)这位“深谋远虑的棋手”,了解了它基于模型预测、滚动优化和约束处理的核心思想,以及它为什么特别适合ACC这样的应用。
希望通过今天的学习,你对ACC不再感到陌生,对MPC也有了一个初步的、直观的印象。这只是我们漫漫征途的第一步。在接下来的文章中,我们将更深入地钻研MPC的技术细节,学习如何为ACC系统建立数学模型,如何配置MPC控制器,如何通过仿真来验证我们的设计,并最终一步步迈向更复杂的自动驾驶控制问题。
记住,控制的世界充满了挑战,但也充满了创造的乐趣。不要怕那些公式和术语,我会一直在这里,用最接地气的方式,陪你一起探索!
习题
为了巩固今天学习的知识,这里有几道小练习题,不妨动手做一做,看看自己掌握了多少。答案在题目下方。
1. 简答题:请用你自己的话描述ACC系统与传统定速巡航(CC)系统的主要区别是什么?
2. 计算题:假设某ACC系统的安全距离模型参数为 d 0 = 7 d_0 = 7 d0=7 米, T h w = 1.8 T_{hw} = 1.8 Thw=1.8 秒。当本车速度 v e g o v_{ego} vego 分别为 54 公里/小时 和 90 公里/小时 时,期望的安全距离 d s a f e d_{safe} dsafe 各是多少?(提示:注意单位换算,1 米/秒 = 3.6 公里/小时)
3. 判断题:模型预测控制(MPC)在做出控制决策时,只考虑当前时刻的系统状态和误差,与其他控制方法(如PID)在这方面是类似的。(对/错)
4. 选择题:以下哪项不是模型预测控制(MPC)的主要特点或优势?
A. 能够预测系统未来的行为
B. 能够显式处理系统约束(如执行器饱和)
C. 计算量通常比PID控制器小
D. 采用滚动时域策略,在线反复优化
答案:
-
答案: 主要区别在于ACC系统能够“自适应”地调整车速以保持与前车的安全距离,而传统CC系统只能保持设定的固定速度,无法对前方交通状况做出反应。ACC系统多了传感器(如雷达/摄像头)来感知前方车辆,并能自动加减速进行跟车,当前方无车时则按设定速度巡航。简单说,ACC比CC更智能,能处理更复杂的交通环境,提高了安全性和舒适性。
-
答案:
首先进行单位换算:- 54 公里/小时 = 54 / 3.6 = 15 54 / 3.6 = 15 54/3.6=15 米/秒
- 90 公里/小时 = 90 / 3.6 = 25 90 / 3.6 = 25 90/3.6=25 米/秒
应用公式 d s a f e = d 0 + T h w ⋅ v e g o d_{safe} = d_0 + T_{hw} \cdot v_{ego} dsafe=d0+Thw⋅vego:
- 当 v e g o = 15 v_{ego} = 15 vego=15 米/秒时:
d s a f e = 7 米 + 1.8 秒 ⋅ 15 米/秒 = 7 + 27 = 34 米 d_{safe} = 7 \text{米} + 1.8\text{秒} \cdot 15 \text{米/秒} = 7 + 27 = 34 \text{米} dsafe=7米+1.8秒⋅15米/秒=7+27=34米 - 当 v e g o = 25 v_{ego} = 25 vego=25 米/秒时:
d s a f e = 7 米 + 1.8 秒 ⋅ 25 米/秒 = 7 + 45 = 52 米 d_{safe} = 7 \text{米} + 1.8\text{秒} \cdot 25 \text{米/秒} = 7 + 45 = 52 \text{米} dsafe=7米+1.8秒⋅25米/秒=7+45=52米
所以,当车速为54公里/小时,期望安全距离为34米;当车速为90公里/小时,期望安全距离为52米。
-
答案:错。
MPC的核心特点之一就是其“预测能力”,它会基于系统模型预测未来一段时间内的系统行为,并基于这个预测进行优化决策。而传统的PID控制器主要是基于当前(和过去累积的)误差进行反应式控制,不具备这种显式的预测未来行为的能力。 -
答案:C. 计算量通常比PID控制器小
MPC由于需要在每个控制周期求解一个优化问题(通常涉及到对未来多个时间步的预测和控制序列的计算),其计算量通常远大于结构简单的PID控制器。A、B、D都是MPC的显著特点和优势。