ROS合集(六)SVIn2 点云地图与 3D Tiles 可视化【预览版】
SLAM 点云发布与 3D Tiles 可视化流程
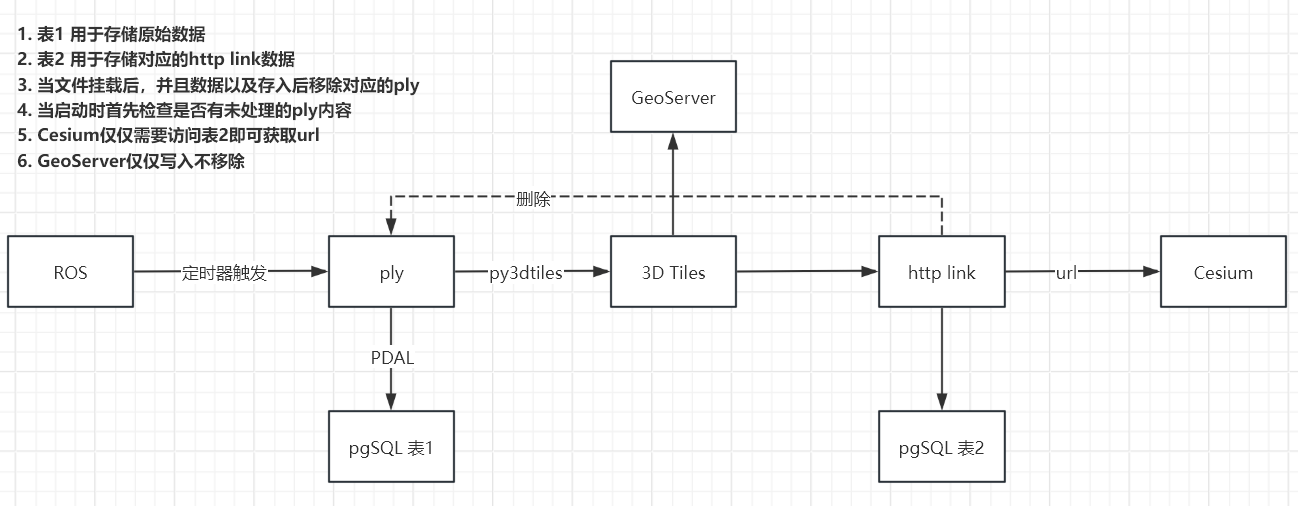
本文记录如何通过 ROS 定时发布点云并自动保存为 .ply 文件,随后由 Python 脚本实时转换为 Cesium 支持的 3D Tiles 格式,并部署到 Web 可视化平台中,支持版本记录与更新。
文章目录
- SLAM 点云发布与 3D Tiles 可视化流程
- 1. ROS 定时发布与保存 `.ply`
- 1.1 初始化发布器
- 1.2 定时更新与保存
- 1.3 保存 `.ply` 文件
- 2. `.ply` 转换为 3D Tiles(Python 脚本)
- 3.移动到GeoServer
- 4. 写入pgSQL中
- 5.Cesium加载对应的URL
- 6.启动命令
1. ROS 定时发布与保存 .ply
1.1 初始化发布器
在构造函数中初始化各类发布器、输出目录、定时器:
Publisher::Publisher(ros::NodeHandle& nh) {nh.param("save_threshold", save_threshold_, 5);std::string pkg = ros::package::getPath("pose_graph");output_dir_ = pkg + "/reconstruction_results";fs::create_directories(output_dir_);pub_matched_points_ = nh.advertise<sensor_msgs::PointCloud>("match_points", 100);pub_gloal_map_ = nh.advertise<sensor_msgs::PointCloud2>("global_map", 1, true);update_timer_ = nh.createTimer(ros::Duration(1),&Publisher::updatePublishGlobalMap,this);
}
Publisher::Publisher(ros::NodeHandle& nh) {// 从参数服务器读取,或使用默认nh.param("save_threshold", save_threshold_, 5);// 输出目录:package 下的 reconstruction_resultsstd::string pkg = ros::package::getPath("pose_graph");output_dir_ = pkg + "/reconstruction_results";fs::create_directories(output_dir_);// 初始化各个话题的发布者pub_matched_points_ = nh.advertise<sensor_msgs::PointCloud>("match_points", 100);// pub_gloal_map_ = nh.advertise<sensor_msgs::PointCloud2>("global_map", 2);pub_gloal_map_ = nh.advertise<sensor_msgs::PointCloud2>("global_map", 1, true);// Timer for periodic global-map publishingupdate_timer_ = nh.createTimer(ros::Duration(1), // 每 1s 发布一次&Publisher::updatePublishGlobalMap, // 回调成员方法this // 绑定 this 指针);
1.2 定时更新与保存
每秒触发一次回调函数,发布全局地图并按阈值条件保存点云:
void Publisher::updatePublishGlobalMap(const ros::TimerEvent& event) {// 1) 获取最新全局地图pcl::PointCloud<pcl::PointXYZRGB>::Ptr global_map_pcl(new pcl::PointCloud<pcl::PointXYZRGB>);pointcloud_callback_(global_map_pcl);// 2) 发布到 ROS 话题if (!global_map_pcl->empty()) {sensor_msgs::PointCloud2 msg;pcl::toROSMsg(*global_map_pcl, msg);msg.header.frame_id = "world";msg.header.stamp = ros::Time::now();publishGlobalMap(msg);}// 3) 根据阈值决定是否保存 PLYupdate_count_++;if (!global_map_pcl->empty() && update_count_ % save_threshold_ == 0) {savePointCloudToFile(global_map_pcl);}
}1.3 保存 .ply 文件
使用 .tmp 临时文件+原子重命名机制保证写入完整性:
void Publisher::savePointCloudToFile(const pcl::PointCloud<pcl::PointXYZRGB>::Ptr& cloud) {// 获取当前时间,并按 YYYYMMDDHHMMSS 格式命名ros::Time now = ros::Time::now();std::time_t t = now.sec;std::tm tm_info;// 推荐使用线程安全版本localtime_r(&t, &tm_info);std::ostringstream oss;oss << output_dir_ << "/map_"<< std::put_time(&tm_info, "%Y%m%d%H%M%S")<< ".tmp";std::string tmp_filepath = oss.str();// 构造最终文件名std::string final_filepath = tmp_filepath;final_filepath.replace(final_filepath.find(".tmp"), 4, ".ply");// 1. 保存到临时文件if (pcl::io::savePLYFileBinary(tmp_filepath, *cloud) == 0) {ROS_INFO_STREAM("Saved TEMP PLY: " << tmp_filepath);} else {ROS_ERROR_STREAM("Failed to save TEMP PLY: " << tmp_filepath);return;}// 2. 原子重命名std::error_code ec;fs::rename(tmp_filepath, final_filepath, ec);if (ec) {ROS_ERROR_STREAM("Failed to rename tmp to ply: " << ec.message());return;}ROS_INFO_STREAM("Saved PLY: " << final_filepath);
}2. .ply 转换为 3D Tiles(Python 脚本)
利用 watchdog 监听 reconstruction_results 目录,并调用 py3dtiles.convert 自动转换:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
convert_ply.py ———— 版本子目录 + 更新列表
"""import time, shutil, logging
from pathlib import Path
from watchdog.observers import Observer
from watchdog.events import FileSystemEventHandler
from py3dtiles.convert import convert# 配置
IN_DIR = Path("~/cesium-deepsea/SLAM/SVln2/svin_ws/src/SVIn/pose_graph/reconstruction_results").expanduser()
TMP_DIR = Path("/data/ply/3dtiles_tmp")
TMP_ROOT = Path("/data/ply/3dtiles_tmp")
WWW_ROOT = Path("/var/www/html/pointcloud")
VERSIONS_LIST = WWW_ROOT/"updates.txt"
POLL_INTERVAL = 5logging.basicConfig(level=logging.INFO, format="%(asctime)s %(levelname)s: %(message)s")def process_ply(ply_path: Path):name = ply_path.nameif not name.endswith(".ply") or ".processing" in name or ".done" in name:returnbase = name[:-4]proc = ply_path.with_name(f"{base}.processing.ply")ply_path.rename(proc)logging.info(f"⟳ Converting {base}")# 1) 准备临时目录tmp_dir = TMP_ROOT/baseif tmp_dir.exists(): shutil.rmtree(tmp_dir)tmp_dir.mkdir(parents=True, exist_ok=True)# 2) 转换try:convert(files=str(proc), outfolder=str(tmp_dir),overwrite=True, jobs=4, cache_size=512,rgb=True, use_process_pool=True, verbose=False)except Exception as e:logging.error(f"✗ Conversion failed: {e}")proc.rename(ply_path)returnlogging.info(f"✔ Done {base}")# 3) 部署到版本子目录dest = WWW_ROOT/baseif dest.exists(): shutil.rmtree(dest)shutil.copytree(tmp_dir, dest)logging.info(f"✔ Deployed version {base}")# 4) 记录到更新列表with open(VERSIONS_LIST, "a") as f:f.write(base + "\n")logging.info(f"✔ Appended to updates.txt: {base}")# 5) 标记完成done = proc.with_name(f"{base}.done.ply")proc.rename(done)class Handler(FileSystemEventHandler):def on_created(self, evt):self._maybe_process(evt.src_path)def on_moved(self, evt):self._maybe_process(evt.dest_path)def _maybe_process(self, filepath):name = Path(filepath).nameif not name.endswith(".ply") \or ".processing" in name \or ".done" in name:returnlogging.info(f"→ 触发处理:{name}")process_ply(Path(filepath))def main():for d in (IN_DIR, TMP_ROOT, WWW_ROOT):d.mkdir(parents=True, exist_ok=True)# 清空旧的列表if VERSIONS_LIST.exists(): VERSIONS_LIST.unlink()# 初次扫描for ply in sorted(IN_DIR.glob("*.ply")):process_ply(ply)# 监听obs = Observer()obs.schedule(Handler(), str(IN_DIR), recursive=False)obs.start()logging.info(f"Watching {IN_DIR}")try:while True: time.sleep(POLL_INTERVAL)except KeyboardInterrupt:obs.stop()obs.join()if __name__ == "__main__":main()转换逻辑 process_ply() 包含:
- 重命名为
.processing.ply - 调用
convert()转换为 3D Tiles - 部署到
www/pointcloud/<version>/ - 更新
updates.txt - 重命名为
.done.ply
3.移动到GeoServer
如果需要服务化接口,也可以将 .ply 导入 PostgreSQL + PostGIS,并使用 GeoServer 提供 Web 服务。
4. 写入pgSQL中
使用 PDAL 或自定义工具,将点云写入 PostgreSQL 的 pointcloud 表结构中,便于空间索引与查询。
5.Cesium加载对应的URL
将输出的子目录部署于GeoServer中通过以下 URL 访问 Cesium

6.启动命令
cd ~/cesium-deepsea/SLAM/SVln2/svin_ws/
catkin_make
cd ~/cesium-deepsea/SLAM/SVln2
source svin_ws/devel/setup.bash
roslaunch okvis_ros svin_stereorig_v1_global.launchcd ~/cesium-deepsea/SLAM/SVln2/svin_ws/datasets/Bus/
rosbag play bus_out_loop_w_cam_info.bag --clock -r 0.8python3 convert_ply.py
# rosservice call /pose_graph_node/save_pointcloud
TODO
优化存储逻辑,目前存储内容导致不断扩张,需要优化存储逻辑
结合点云变动量计算是否保存(动态阈值)
补充完整代码以及说明文档