为什么抗干扰天线不能做RTK差分(三)“既要又要”的抗干扰天线
在《为什么自适应调零抗干扰天线不能做RTK差分定位?》中我们介绍了RTK差分定位对卫星接收天线相位中心稳定度有严格的要求。
在《自适应调零抗干扰天线为何不适合进行RTK差分定位(二)》中,我们介绍了自适应调零抗干扰天线的基本原理。由于抗干扰处理模块中的FIR滤波器组的系数(波束权值)是不断变化的,导致经过抗干扰处理之后的载波信号相位也是不断变化的。正是因为载波相位的不稳定和不连续,所以自适应调零抗干扰天线没法同时完成RTK差分计算。
那么,是否存在一种能“既要又要”的天线呢?今天我们就来探讨这个问题。
两个假设
既然无法做到“既要又要”是因为抗干扰模块输出信号的相位不断变化,既不稳定也不连续,那么基于最直观、最朴素的认知,我们可以提出以下2个假设:
1.能否补偿载波相位的差值
抗干扰模块内部的波束权值由软件算法计算得出,前一次迭代计算的波束权值和本次迭代计算的波束权值都是已知的,所以我们能够计算出前后两次波束权值引发的相位差。
如果能够对经过抗干扰模块处理的信号进行相位差补偿,不就可以保持载波相位连续稳定了吗?
如果这种方法可行,那就能够进行RTK差分了。
2. 能否产生多个波束,使接收卫星的波束保持相位稳定,而抗干扰的波束则无需考虑相位稳定。
自适应调零天线会在干扰来向上产生零陷,换句话说,可以认为在干扰方向上天线的增益出现了一个深陷的大坑,天线增益从0dBi附近变为 -40dBi、 -60dBi……,从而这个方向上的干扰受到了抑制。

抗干扰处理之前的天线方向图如下。图中天线的增益为0dBi。

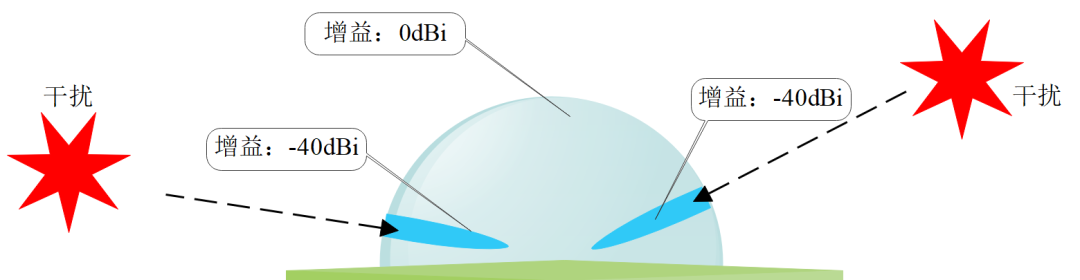
抗干扰处理之后的天线方向图如下。图中有2个干扰,在干扰的来向上,方向图产生了零陷,在零陷位置,天线的增益为负数,且绝对值很大。例如在下图中,零陷位置的天线增益为 -40dBi,而其他位置的天线增益仍是0dBi。
经典的自适应调零天线接收卫星的波束是单个固定宽波束的。单宽波束覆盖上半球的所有可见卫星,如下图所示:
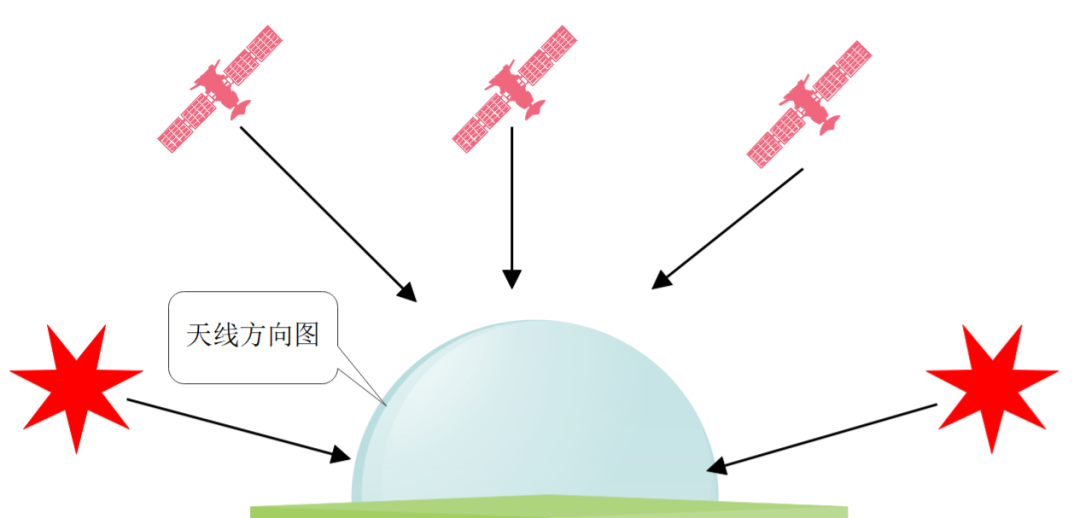
由于干扰和卫星信号都位于同一个固定的宽波束内,所以二者会相互影响。那么如果我们产生2个波束呢,将卫星信号置于一个波束内,将干扰置于另一个波束内。使接收卫星信号的波束保持相位连续稳定,而干扰所在的波束则无需考虑相位稳定。这样不也能够实现RTK差分了吗?
上述两个假设,是实现“既要又要”的基础。
实现方法
理论和实践证明,上述两个假设是成立的,并且是可以实现的。
相位差补偿
在波束权值更新时,计算新旧权值对卫星信号相位的差异,并补偿相位偏移。
如果旧权值向量为 w₀,新权值为 w₁,则相位补偿量

w₁和w₀是前后两次的权值向量,即抗干扰处理模块中的FIR滤波器组的系数向量。
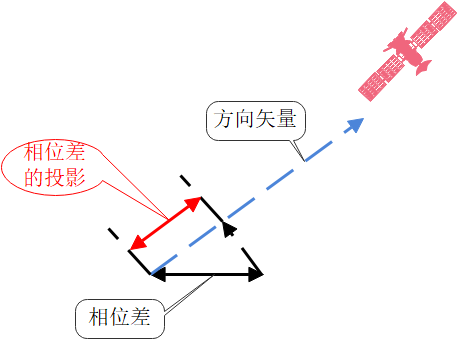
a(θ):是卫星方向的导向矢量。根据GNSS定位原理,伪距/载波相位观测量对应的是卫星到接收天线的传播时间。抗干扰算法引起的信号相位变化,必须在卫星和接收天线的方向矢量上做投影,才能计算出抗干扰算法的相位变化对伪距/载波相位的影响。如下图所示:
Tips:
这个方法在 卫星通信之相控阵天线-极简版中“相控阵天线基本原理”也有介绍,说的其实是同一个意思。
这就带来了另外3个问题:
1.计算方向矢量
计算卫星的方向矢量必须知道卫星位置和本地位置,这就要求GNSS接收机已经捕获、跟踪了卫星,从卫星播发的信号中获取了卫星位置,同时完成了定位解算,得到了GNSS接收机的位置。有了卫星位置和接收机位置才能计算出方向矢量。
那么抗干扰算法导致相位抖动,引起定位不准确,是否会导致方向矢量计算错误呢?
Tips:由于导航卫星距离地球的高度一般在3.6万公里(GEO卫星、IGSO卫星)和2.2万公里(MEO卫星),所以GNSS接收机的位置相差几米,对卫星的方向矢量的影响可以忽略不计。
所以无需考虑GNSS接收机定位精度对方向矢量的影响以及对相位补偿的影响。
2.相位补偿只能在GNSS接收机中完成
由于卫星信号都是扩频信号,每个卫星的信号频点相同、带宽相同,通过不同的扩频码来区分,从频域上看,所有卫星的信号混合在一起。
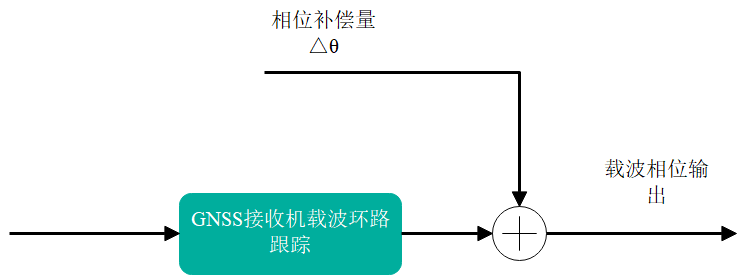
抗干扰算法只是对接收的信号(所有的卫星信号和干扰都混在一起)进行处理,不会对扩频信号进行解扩处理,也就无法得到单独某个卫星的相位,因此依靠抗干扰天线自身无法完成相位补偿。
在GNSS接收机中,信号完成了解扩处理,每个卫星都被单独解析出来,每个卫星的相位也都能得到,所以相位补偿只能在GNSS接收机中完成。如下图所示:
3.抗干扰天线和GNSS接收机必须共用一个时钟源
这是显而易见的。如果抗干扰算法和GNSS接收机的时钟不同,那么时钟之间必然存在相位不同步的问题,相位补偿也就无从谈起。
多波束
天线高仰角增益高,受到地面多径影响小,高仰角卫星参与定位有利于提高精度。在正常情况下干扰一般都来自于低仰角方向。那么是否存在一种算法:
-
能够产生2个波束,一个是主波束,主要覆盖高仰角区域(比如仰角30°以上的区域),用于接收高仰角的卫星信号,剩下的区域根据干扰的情况产生零陷,用于抑制干扰。
-
保证主波束的相位稳定连续,而主波束之外的区域,信号的相位不作要求;
-
GNSS接收机选择主波束内的卫星参与定位
如果能够满足上述3个条件,那么不也能够保证RTK差分了吗?
有一种方法LCMV(线性约束最小方差)可以做到。LCMV算法可以强制波束形成器在主波束内保持零相位偏移(或已知固定相位),同时在低仰角方向上产生零陷。算法的实现如下:
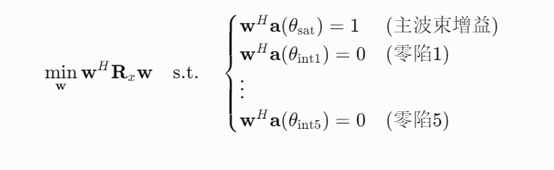
上述公式中,α(θsat)为卫星方向导向矢量。
同样的,自适应波束形成的权值调整会影响所有主波束内卫星信号的合成相位,但不同卫星的几何方向(方向矢量α(θi))不同,导致每个卫星的相位变化不同,如何保证所有高仰角卫星相位都稳定连续?
这里有3个方法:
1.单个卫星独立调节
在GNSS接收机的数字基带中,计算每个卫星的载波相位补偿值△θi,对每个卫星的载波相位单独补偿。
2.主波束统一调节
默认主波束内各个卫星的相位变化相同,采用波束中心点角度(比如仰角45°),用45°仰角的卫星方向导向矢量计算相位补偿值△θmain。
主波束内的所有卫星都用△θmain进行补偿。
3.主波束分区域调节
将卫星按方向分组(比如分2组:30°~60°和60°~90°),每组独立计算补偿值,然后每组内的所有卫星采用同一个补偿值。
7阵元天线能够抗几个干扰
7阵元天线的自由度为 6(即N−1 = 6)。如果采用1个主波束(仰角>30°)的方案,主波束占用1个自由度。剩余自由度:6−1 = 5,因此理论上可生成 5个独立零陷,能够抑制5个干扰。
总结
上文简要介绍了“既要又要”的基本原理,实际的方案设计、应用场景要比上述介绍的复杂得多,需要考虑的因素也很多。相位补偿的实现非常复杂,需要精确地跟踪和补偿每个卫星的相位变化。在多波束系统中,波束的调整和优化是一个复杂的任务,需要考虑波束间的干扰和性能平衡。
文章存在很多不完善、不严谨之处,但基本原理就是这些了。
通过上述介绍,我们知道这个世界上还是能够做到“既要又要”的。