FPGA通信之VGA
文章目录
- 基本概念:
- 水平扫描:
- 垂直扫描:
- 时序如下:
- 端口设计
- 疑问
- 为什么需要输出那么多端口
- 不输出时钟怎么保证电子枪移动速度符合时序
- VGA转HDMI
- 仿真电路图
- 代码
- 总结:野火电子yyds
为了做图像处理, 现在我们开始研究VGA
基本概念:
水平扫描:
- 有效数据段:显示图像的部分。
- 右边界区域(Right Border):扫描完有效数据后的空白区域。
- 水平前沿(Front Porch):扫描完有效数据但未收到同步信号前的空白时间段
- 行同步信号脉冲(Sync Pulse):通知电子枪回到左侧。
- 水平后沿(Back Porch):电子枪回到左侧的时间段。
- 左边界区域(LEFT Border):显示图像前的空白区域。
垂直扫描:
- 有效行段:显示图像的行。
- 下边界区域(Bottom Border):扫描完所有行后的空白区域。
- 垂直前沿(Front Porch):扫描完所有行但未收到同步信号前的空白时间段
- 场同步信号脉冲(Sync Pulse):通知电子枪回到顶部。
- 垂直后沿(Back Porch):电子枪回到顶部的时间段。
- 上边界区域(Top Border):显示图像前的空白区域。
时序如下:
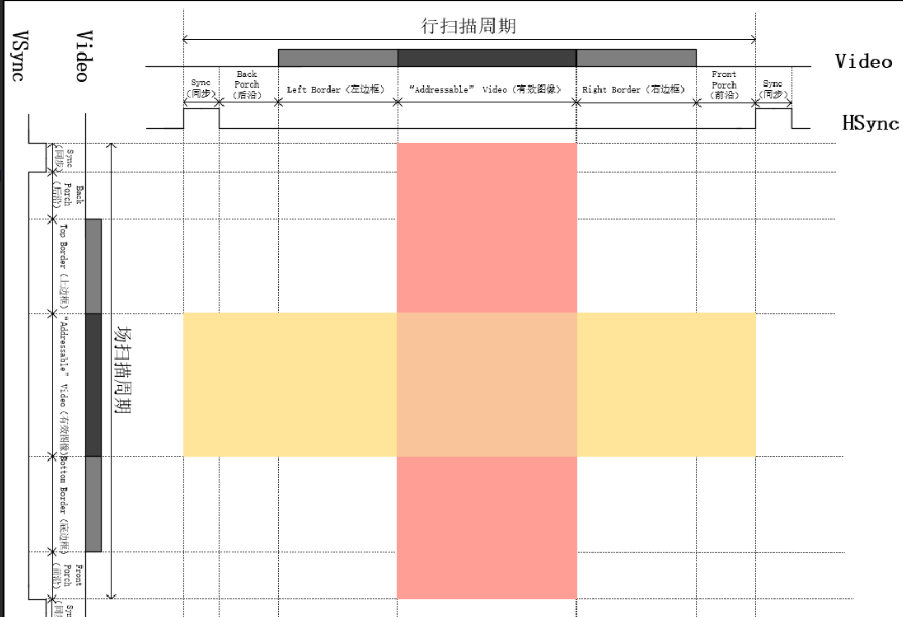


基于上述对VGA时序的详细分析,设计一个VGA控制器主要也就包括行计数器、场计数器,以及行、场同步信号在合适的时刻产生低电平脉冲,以及在显示有效区域将图像数据输出
- 时间节点分析:
行同步有效: 96个clk --> 0,1,2----95 —>95的下一个时钟加入下一步
回扫时间: 40个clk --> 96, 97—135 -->135的下一个时钟加入下一步
左缓冲边界: 8个clk --> 136,137—143 -->143的下一个时钟加入下一步
数据段: 640个clk–> 144, 145–783 -->783的下一个时钟加入下一步
右缓冲边界: 8个clk --> 784, 785–791 -->791的下一个时钟加入下一步
等待回扫: 8个clk --> 792, 793–799 -->799的下一个时钟加入下一步
- 现在对时钟的感知有以下进步:
1. 三个点确定两个线段, 也就是两个时间段
2. 但是现在应该有一个模型在脑子里, 也就是每一个时间点 右方 都有一个自己的时间段
3. 假如从某个时间节点x开始要维持y个时间单元
4. 根据第二点结论, 除原点x外我们需要y-1个时间点, 那么我们可以计算出最后一个时间节点的值为x+y-1, 例如从零时刻开始维持8个时钟周期, 那么最后一个时刻对应的节点为7
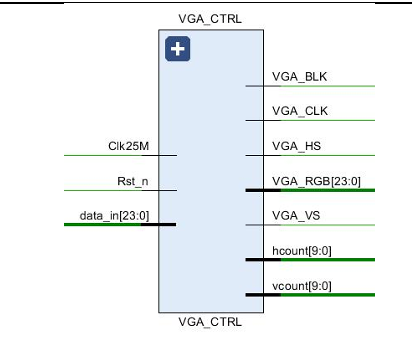
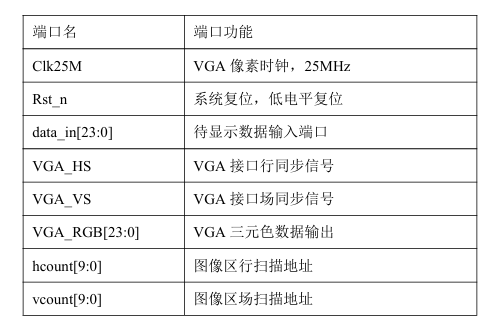
端口设计
or
疑问
为什么需要输出那么多端口
因为这个模块不是顶层模块, 所以需要增加很多输出, 作为内部变量方便顶层访问, 比如输出的计数器, 顶层模块访问后可以知道当前显示屏光标的位置,就可以在特定区域实现特定控制
如下为常用的顶层
module VGA (
input i_clk,
input i_arstn,
input [23:0] i_data,
output o_h_sync,
output o_v_sync,
output [23:0] o_data
// 可选隐藏:o_VGA_clk, o_VGA_BLK, o_VGA_ho_cnt, o_VGA_ve_cnt
);
而且, FPGA在连接显示屏前还需要一个DAC芯片(数字转模拟)
如图:顶层模块只需要三个干净的输出,野火电子教程
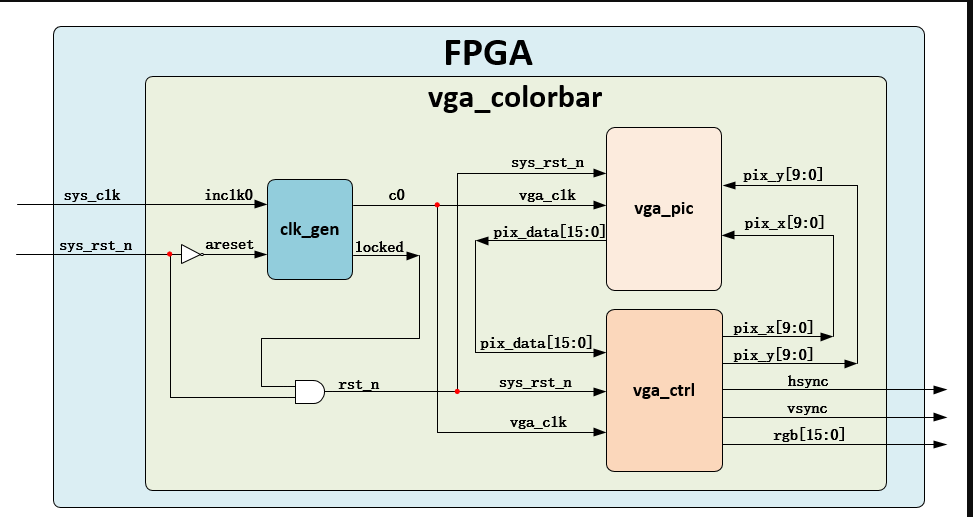
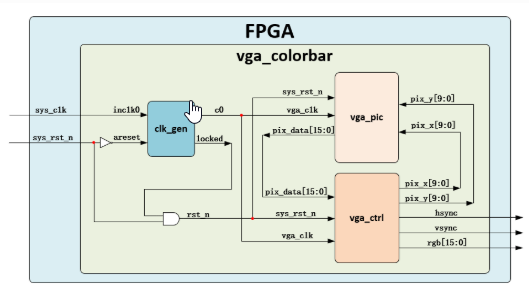
- 系统上电后,板卡传入系统时钟(sys_clk)和复位信号(sys_rst_n)到顶层模块;
- 系统时钟由顶层模块传入时钟生成模块(clk_gen),分频产生VGA工作时钟(vga_clk),作为图像数据生成模块(vga_pic)和VGA时序控制模块(vga_ctrl)的工作时钟;
- 图像数据生成模块以VGA时序控制模块传入的像素点坐标(pix_x,pix_y)为约束条件,生成待显示彩条图像的色彩信息(pix_data);
- 图像数据生成模块生成的彩条图像色彩信息传入VGA时序控制模块,在模块内部使用使能信号滤除掉非图像显示有效区域的图像数据,产生RGB色彩信息(rgb),在行、场同步信号(hsync、vsync)的同步作用下,将RGB色彩信息扫描显示到VGA显示器,显示出彩条图像
不输出时钟怎么保证电子枪移动速度符合时序
电子枪移动速度的同步原理
(1) 模拟信号的“自时钟”特性
CRT显示器内部的行扫描电路本质上是一个模拟振荡器,其振荡频率由以下因素锁定:
HSYNC信号的频率:显示器会强制将自身的行扫描频率与输入的HSYNC信号同步(类似锁相环PLL的原理)。
例如:在640x480@60Hz模式下,HSYNC频率为31.47kHz,显示器会自动调整电子枪的水平扫描速度以匹配这一频率。
(2) 电子枪的物理运动控制
行扫描电路:CRT内部的行偏转线圈(由锯齿波电流驱动)控制电子枪的水平移动速度。
锯齿波的斜率(即电子枪移动速度)由显示器电路根据HSYNC频率自动调整。
FPGA的RGB数据速率必须与电子枪的物理扫描速度匹配,但这通过以下方式保证:
FPGA以固定的像素时钟(如25.175MHz)生成RGB数据。
由于HSYNC频率是像素时钟的衍生信号*(如每800个像素时钟触发一次HSYNC),因此电子枪的移动速度自然与FPGA数据同步。
VGA转HDMI
https://blog.csdn.net/gslscyx/article/details/137930810
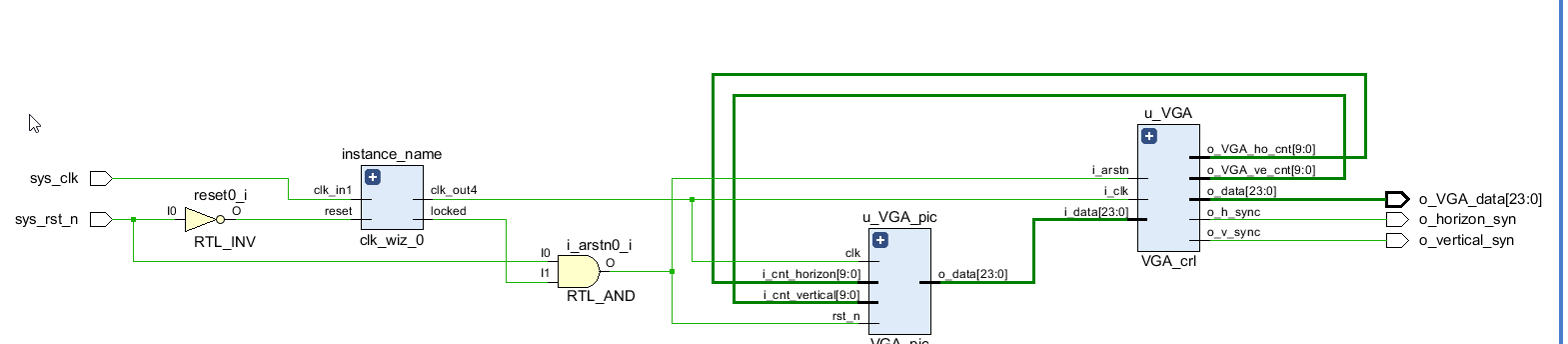
仿真电路图
调用锁相环IP生成25Mhz信号
代码
`timescale 1ns / 1ps
//****************************************VSCODE PLUG-IN**********************************//
//----------------------------------------------------------------------------------------
// IDE : VSCODE
// VSCODE plug-in version: Verilog-Hdl-Format-2.4.20240526
// VSCODE plug-in author : Jiang Percy
//----------------------------------------------------------------------------------------
//****************************************Copyright (c)***********************************//
// Copyright(C) COMPANY_NAME
// All rights reserved
// File name:
// Last modified Date: 2025/05/17 22:22:41
// Last Version: V1.0
// Descriptions:
//----------------------------------------------------------------------------------------
// Created by: USER_NAME
// Created date: 2025/05/17 22:22:41
// Version: V1.0
// TEXT NAME: VGA_top.v
// PATH: D:\vivado\VGA\VGA_top.v
// Descriptions:
//
//----------------------------------------------------------------------------------------
//****************************************************************************************// module VGA_top(input sys_clk ,input sys_rst_n ,output o_horizon_syn ,output o_vertical_syn ,output [ 23: 0] o_VGA_data
);//---------------------------------------------------------------------------------------// PLL锁相环IP调用, 将时钟频率定义为25MHZ //---------------------------------------------------------------------------------------wire PPL_clk ;//锁相环wire locked ;clk_wiz_0 instance_name(// Clock out ports.clk_out1 ( ),// output clk_out1.clk_out2 ( ),// output clk_out2.clk_out3 ( ),// output clk_out3.clk_out4 (PPL_clk ),// output clk_out4// Status and control signals.reset (~sys_rst_n ),// input reset.locked (locked ),// output locked// Clock in ports.clk_in1 (sys_clk) );//---------------------------------------------------------------------------------------// //---------------------------------------------------------------------------------------wire [ 23: 0] w_VGA_data ;wire w_VGA_clk ;wire w_VGA_BLK ;wire [ 9: 0] w_cnt_horizon ;wire [ 9: 0] w_cnt_vertical ;
VGA_crl u_VGA(.i_clk (PPL_clk ),.i_arstn (sys_rst_n && locked ),.i_data (w_VGA_data ),.o_h_sync (o_horizon_syn ),.o_v_sync (o_vertical_syn ),.o_data (o_VGA_data ),.o_VGA_clk (w_VGA_clk ),// 输出一个同步时钟, 基于工程实践, 设置为输入时钟的反时钟更佳.o_VGA_BLK (w_VGA_BLK ),// 设置一个消隐信号, 似乎用不到.o_VGA_ho_cnt (w_cnt_horizon ),// 方便顶层读取当前扫描位置.o_VGA_ve_cnt (w_cnt_vertical ) // 方便顶层读取现在扫描位置
);VGA_pic u_VGA_pic(.clk (PPL_clk ),.rst_n (sys_rst_n && locked ),.i_cnt_horizon (w_cnt_horizon ),// 从visible像素开始计算.i_cnt_vertical (w_cnt_vertical ),// 从visible像素开始计算.o_data (w_VGA_data )
);endmodule// verilog 不支持链式条件, 必须分开
`timescale 1ns / 1ps
module VGA_pic(input clk ,input rst_n ,input [ 9: 0] i_cnt_horizon ,//从visible像素开始计算input [ 9: 0] i_cnt_vertical ,//从visible像素开始计算output [ 23: 0] o_data
);//---------------------------------------------------------------------------------------// 时序参数定义:parameter VGA_HS_end = 10'd96,//水平同步器维持时间VGA_H_bach_Porch=10'd40,VGA_left_border=10'd8,VGA_H_DATA_time=10'd640,VGA_right_border=10'd8,VGA_H_front_Porch=10'd8;parameter period_horizon = VGA_HS_end+VGA_H_bach_Porch+VGA_left_border+VGA_H_DATA_time+VGA_right_border+VGA_H_front_Porch;parameter VGA_h_visible_start = VGA_HS_end+VGA_H_bach_Porch+VGA_left_border-1;parameter VGA_h_visible_end = VGA_h_visible_start+VGA_H_DATA_time;parameter VGA_VS_end = 10'd2 ,//垂直同步器维持时间VGA_V_bach_Porch=10'd25,VGA_top_border=10'd8,VGA_V_DATA_time=10'd480,VGA_bottom_border=10'd8,VGA_V_front_Porch=10'd2;parameter period_vertical = VGA_VS_end+VGA_V_bach_Porch+VGA_top_border +VGA_V_DATA_time+VGA_bottom_border+VGA_V_front_Porch;parameter VGA_v_visible_start = VGA_VS_end+VGA_V_bach_Porch+VGA_top_border-1;parameter VGA_v_visible_end = VGA_v_visible_start+VGA_V_DATA_time;//---------------------------------------------------------------------------------------//---------------------------------------------------------------------------------------//定义颜色编码localparamBLACK = 24'h000000, //黑色BLUE = 24'h0000FF, //蓝色RED = 24'hFF0000, //红色PURPPLE =24'hFF00FF, //紫色GREEN = 24'h00FF00, //绿色CYAN = 24'h00FFFF, //青色YELLOW = 24'hFFFF00, //黄色WHITE = 24'hFFFFFF; //白色//定义每个像素块的默认显示颜色值localparamR0_C0 = BLACK, //第0行0列像素块R0_C1 = BLUE, //第0行1列像素块R1_C0 = RED, //第1行0列像素块R1_C1 = PURPPLE, //第1行1列像素块R2_C0 = GREEN, //第2行0列像素块R2_C1 = CYAN, //第2行1列像素块R3_C0 = YELLOW, //第3行0列像素块R3_C1 = WHITE; //第3行1列像素块 //---------------------------------------------------------------------------------------//---------------------------------------------------------------------------------------// 列检测wire C0_act ;assign C0_act = (0 <= i_cnt_horizon && i_cnt_horizon<320);wire C1_act ;assign C1_act = (320 <= i_cnt_horizon && i_cnt_horizon<640);// 行检测wire R1_act,R2_act,R3_act,R0_act ;assign R0_act = (0<=i_cnt_vertical&& i_cnt_vertical<120);assign R1_act = (120<=i_cnt_vertical&&i_cnt_vertical<240);assign R2_act = (240<=i_cnt_vertical&& i_cnt_vertical<360);assign R3_act = (360<=i_cnt_vertical&& i_cnt_vertical<480);//--------------------------------------------------------------------------------------- reg [ 23: 0] r_VGA_data ;always@(*)beginif (R3_act&C1_act) beginr_VGA_data = R3_C1;endelse if (R3_act&C0_act) beginr_VGA_data = R3_C0;endelse if (R2_act&C1_act) beginr_VGA_data = R2_C1;endelse if (R2_act&C0_act) beginr_VGA_data = R2_C0;endelse if (R1_act&C1_act) beginr_VGA_data = R1_C1;endelse if (R1_act&C0_act) beginr_VGA_data = R1_C0;endelse if (R0_act&C1_act) beginr_VGA_data = R0_C1;endelse if (R0_act&C0_act) beginr_VGA_data = R0_C0;endelse r_VGA_data =24'd0;endassign o_data = r_VGA_data;
endmodule
module VGA_crl (input i_clk ,input i_arstn ,input [ 23: 0] i_data ,output o_h_sync ,output o_v_sync ,output [ 23: 0] o_data ,output o_VGA_clk ,//输出一个同步时钟, 基于工程实践, 设置为输入时钟的反时钟更佳output o_VGA_BLK ,//设置一个消隐信号, 似乎用不到output [ 9: 0] o_VGA_ho_cnt ,//方便顶层读取当前扫描位置output [ 9: 0] o_VGA_ve_cnt //方便顶层读取现在扫描位置
);//---------------------------------------------------------------------------------------// 时序参数定义:parameter VGA_HS_end = 10'd96,//水平同步器维持时间VGA_H_bach_Porch=10'd40,VGA_left_border=10'd8,VGA_H_DATA_time=10'd640,VGA_right_border=10'd8,VGA_H_front_Porch=10'd8;parameter period_horizon = VGA_HS_end+VGA_H_bach_Porch+VGA_left_border+VGA_H_DATA_time+VGA_right_border+VGA_H_front_Porch;parameter VGA_h_visible_start = VGA_HS_end+VGA_H_bach_Porch+VGA_left_border-1;parameter VGA_h_visible_end = VGA_h_visible_start+VGA_H_DATA_time;parameter VGA_VS_end = 10'd2 ,//垂直同步器维持时间VGA_V_bach_Porch=10'd25,VGA_top_border=10'd8,VGA_V_DATA_time=10'd480,VGA_bottom_border=10'd8,VGA_V_front_Porch=10'd2;parameter period_vertical = VGA_VS_end+VGA_V_bach_Porch+VGA_top_border +VGA_V_DATA_time+VGA_bottom_border+VGA_V_front_Porch;parameter VGA_v_visible_start = VGA_VS_end+VGA_V_bach_Porch+VGA_top_border-1;parameter VGA_v_visible_end = VGA_v_visible_start+VGA_V_DATA_time;//---------------------------------------------------------------------------------------reg [ 9: 0] r_cnt_h ;// horizon counterreg [ 9: 0] r_cnt_v ;// vertical counteralways @(posedge i_clk or negedge i_arstn) beginif (!i_arstn) beginr_cnt_h <= 0;endelse beginif (r_cnt_h == period_horizon-1) beginr_cnt_h <= 0;endelse beginr_cnt_h <= r_cnt_h + 1;endendendalways @(posedge i_clk or negedge i_arstn) beginif (!i_arstn) beginr_cnt_v <= 0;endelse beginif (r_cnt_h == period_horizon-1) beginif (r_cnt_v == period_vertical-1) beginr_cnt_v <= 0;endelse beginr_cnt_v <= r_cnt_v + 1;endendelse r_cnt_v <= r_cnt_v;endendwire w_VGA_HS ;// 行同步信号wire w_VGA_VS ;// 场同步信号assign w_VGA_HS = (r_cnt_h > VGA_HS_end-1);assign w_VGA_VS = (r_cnt_v > VGA_VS_end-1);
/*时间节点分析:行同步有效: 96个clk --> 0,1,2----95 --->95的下一个时钟加入下一步回扫时间: 40个clk --> 96, 97---135 -->135的下一个时钟加入下一步左缓冲边界: 8个clk --> 136,137---143 -->143的下一个时钟加入下一步数据段: 640个clk--> 144, 145--783 -->783的下一个时钟加入下一步右缓冲边界: 8个clk --> 784, 785--791 -->791的下一个时钟加入下一步等待回扫: 8个clk --> 792, 793--799 -->799的下一个时钟加入下一步*/wire w_dat_act ;// 数据使能信号, 我们只希望在中间输出数据, 因此在这个阶段使能, 注意不输出数据不代表直接关闭电子枪assign w_dat_act = (VGA_h_visible_start < r_cnt_h && r_cnt_h <=VGA_h_visible_end) && (VGA_v_visible_start < r_cnt_v && r_cnt_v <= VGA_v_visible_end);//RGB控制wire [ 23: 0] w_VGA_GRB ;assign w_VGA_GRB = (w_dat_act)? i_data:24'd0;assign o_data = w_VGA_GRB;//同步时钟控制assign o_VGA_clk = ~i_clk;//行场同步信号assign o_h_sync = w_VGA_HS;assign o_v_sync = w_VGA_VS;//消隐信号, BLK等同于data_act, 高电平代表着输出数据(visible)的时间锻, 可能是低电平有效, 这里和原理不太一样,原理上消隐信号应该只在等待回扫和回扫时间有效assign o_VGA_BLK = w_dat_act;//行场的计数器输出, 方便顶层读取当前位置assign o_VGA_ho_cnt = (w_dat_act)? (r_cnt_h-VGA_h_visible_start):10'd0;assign o_VGA_ve_cnt = (w_dat_act)? (r_cnt_v-VGA_v_visible_start):10'd0;
endmodule总结:野火电子yyds
将VGA控制器分成三个子模块:
- PLL生成固定时钟
- VGA_CRL: 实现VGA协议的基本时序控制, 输出VGA数据以及可视区计数器
- VGA_PIC: 通过读取CRL的可视区计数器, 知道当前可视区像素位置, 将要输出的图像写在这里, 并把图像背后的像素数据发送给CRL, CRL会通过内部指针决定什么时候传递出顶层端口