2021~2025:特斯拉人形机器人Optimus发展进程详解
特斯拉人形机器Optimus的进化历程如下:
-
2021年8月19日,在首届AI Day上,马斯克发布了特斯拉人形机器人计划,并提出人形机器人概念:Tesla Bot。
-
2022年9月30日,在第二届 AI Day 上,特斯拉发布 了Optimus 原型机。
-
2023年5月16日,特斯拉在股东大会上发布了 Optimus 的最新视频,展示了机器人在运动控制、环境感知、动作捕捉等方面的突破性进展。
-
2023年9月24日,特斯拉发布视频展示了Optimus的手臂和腿的自我校准、物品自主分类、单脚保持平衡等能力。
-
2023年12月13日,特斯拉CEO马斯克在社交平台X(原Twitter)上首次线上发布Optimus第二代(Optimus Gen2)。
-
2024年5月5日,Tesla Optimus 官方账号在社交媒体 X 上发布了机器人分拣电池的视频。
-
2024年10月11日,在“We Robot” 活动现场,Optimus展示了跳舞、倒酒、分发礼品、与观众互动等动作。
-
2024年10月17 日,特斯拉通过官方 X 平台账号发布 Optimus 最新进展视频,集中展示了视觉导航避障、非平坦地形自主行走、自主充电、重物搬运(单次负载达11kg)及爬楼梯等方面的能力。
-
2024年11月28日,特斯拉X平台官方账号发布Optimus接网球演示视频。
-
2024年12月10日,特斯拉机器人官方账号在X平台上发布Optimus在户外上下坡视频。视频展示了 Optimus 在复杂地形上的行走能力。
-
2025年5月14日,特斯拉机器人官方账号在X平台上发布Optimus最新跳舞视频。
1. 2021年8月,Tesla AI Day
2021年8月,在首届AI Day上,马斯克发布了特斯拉人形机器人计划,并提出人形机器人概念:Tesla Bot。
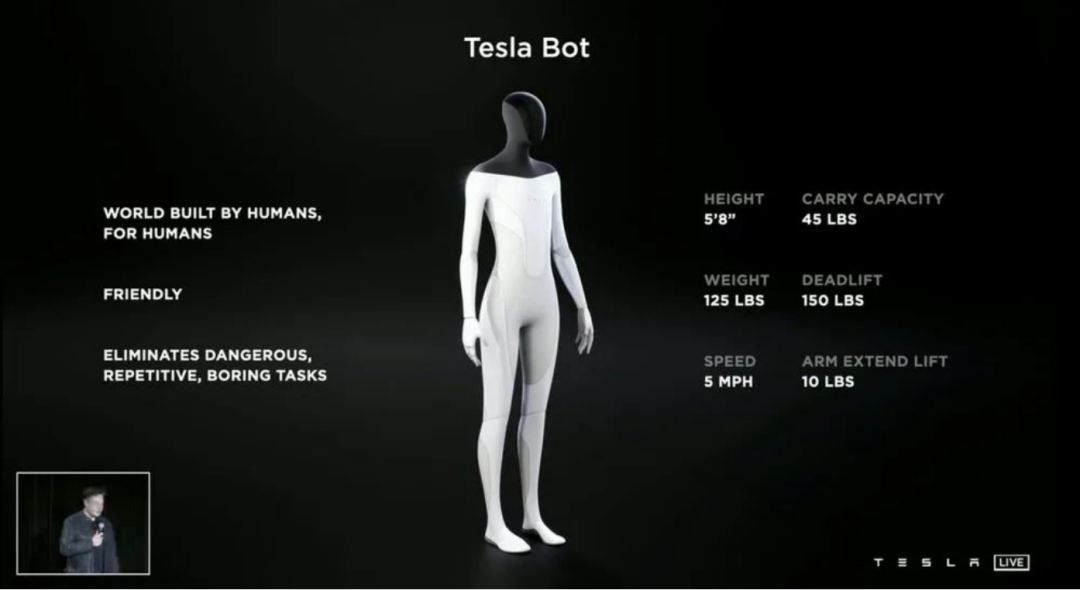
根据马斯克介绍,该机器人将设计成:身高5英尺8英寸(≈1.72m),体重125英镑(约合56.7kg)。另外,特斯拉计划将于2022年推出该款机器人的原型机(即Optimus原型机),并将此类机器人定位为“通用型机器人”,在未来将会去代替人类从事“危险、重复、无聊”的工作。
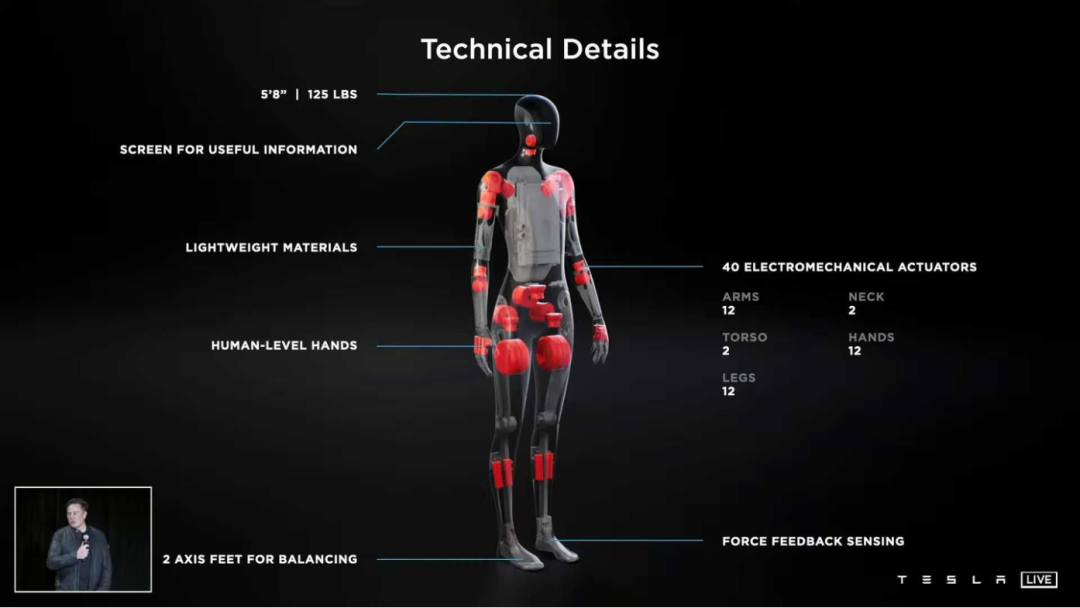
同时,特斯拉还对外发布了这款机器人的一些技术细节:全身采用轻量化材料,共有40个电动执行器 ——手臂12个 + 手部12个 + 腿部12个 + 颈部2个 + 躯干2个。此外,脚部安装有力反馈传感器,并采用2轴平衡设计;
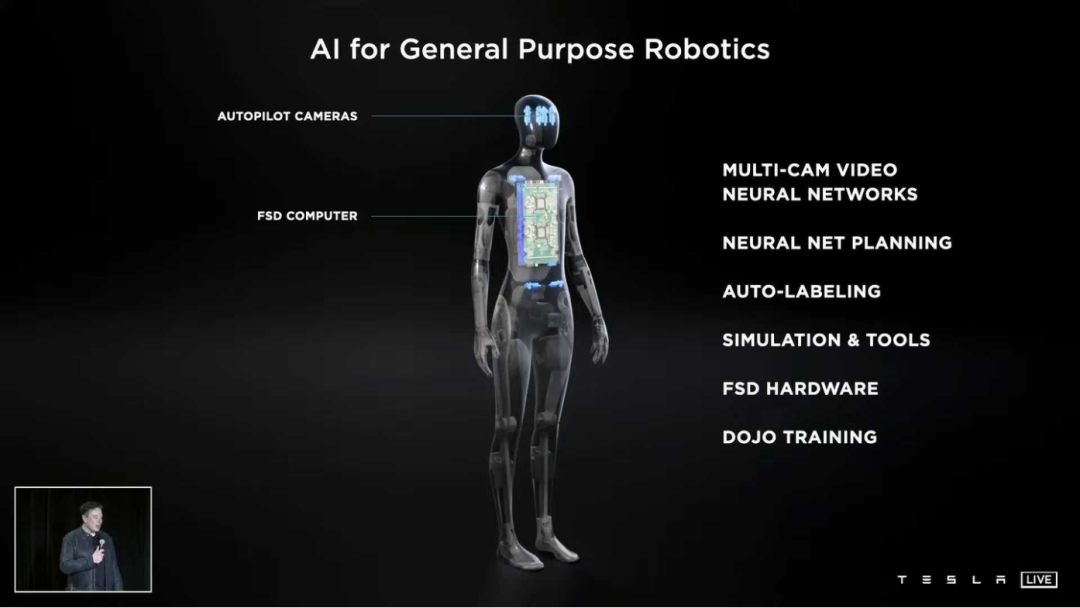
Tesla Bot 将使用特斯拉的自动驾驶系统Autopilot —— 摄像头+ FSD计算平台,并宣称将复用其在汽车领域的所有工具,包括多摄像机视觉神经网络、规划和控制神经网络、自动标注/仿真工具、Dojo训练场等。
2022年:Optimus 原型机发布
2. 2022年9月:Tesla AI Day
2022年9月,在第二届 AI Day 上,特斯拉发布 了Optimus 原型机。Optimus 原型机周身直接裸露电线,没有任何装饰,直接呈现其内部的关节、电路板、电缆等设备,可以直观地向观众展示每个动作细节。
在AI Day上,Optimus原型机进行了现场动作展示,同时,特斯拉还播放了提前拍摄的Optimus在其它场景下的展示视频。
1)现场展示:在现场展示环节,机器人从舞台后方缓缓走出,依次完成行走、停止、挥手问候、转身等亮相动作,中间还表演了简单的舞蹈。
2)视频展示:主要包括办公室和工厂两个场景。
在办公室内,机器人提起水壶浇花和双手搬运箱子至目标位置。从视频出可以看出,机器人能够准确定位周围人员或障碍物,并主动避让等;在特斯拉弗里蒙特工厂中,机器人执行汽车零部件抓取和放置工作。
除原型机外,特斯拉还展示了接近量产的第一代Optimus。其执行器、电池组、控制器等关键核心零部件均由特斯拉自主研发。不过,受限于研发周期,在 AI Day 举办时该机器人尚未完全完工,出场时由几名工作人员推上舞台。马斯克透露,预计再过几周,第一代 Optimus 就能实现自主行走。
此外,马斯克坦言,Optimus 在设计之初便沿用了与汽车一致的设计理念 —— 以量产为目标,最终实现低成本与高性能的平衡。他还预测,待 Optimus 产量达数百万台后,其价格可低至 2 万美元。
与此同时,马斯克还勾勒了一幅美好愿景。他指出,经济总量由“生产者数量” 乘以 “平均生产力” 决定,若生产者数量不受限制,经济总量将趋近于无限,未来社会有望彻底消除贫穷。这意味着,随着机器人的大规模量产,社会劳动力短缺问题将不复存在 —— 人们在产品和服务层面能够获得所需的一切,而这一变革将从根本上重塑人类已知的文明形态。
以人体仿生设计为核心(基于人类形态与功能设计),同时最大程度复用汽车领域的资源(造车积累的经验、技术与供应链资源)。
1)人体仿生研究
A. 膝关节设计:Optimus 的膝关节模仿人类膝盖骨结构,采用了类似于四连杆机构的设计,尽量复刻生物学上的 “非线性” 逻辑,贴合膝关节从直立到完全弯曲时的受力曲线,这样的设计可以使 Optimus 在行走、下蹲等动作中,能够更有效地利用力量,并且动作姿态更自然、更节能,从而更好地模拟人类的运动方式。
B. 低频率运动设计:人类日常行走的频率通常处于低赫兹范围,属于低频率运动。这种运动方式节奏舒缓,能让身体各部位有序配合,以较低能耗维持长时间移动。而机器人要实现低频率运动,每一个动作细节都被放大,对动作的精准度、连贯性以及稳定性要求极高,控制难度也随之大幅提升。在这次发布会上,特斯拉虽然提及了Optimus 在运动控制上采用了仿生人体低频率运动的设计理念,但并未披露更细节的设计方案。
C. 灵巧手设计:Optimus 的手部采用仿生的五指结构设计,通过金属腱绳传动实现自适应抓握功能;其手部共配备 6 个关节、11 个自由度(其中,拇指 3 个、其余四指各 2 个),此外还采用反向自锁设计,可使手指在断电状态下依然维持抓握形态,进一步强化了灵巧手的实用性和可靠性。
2)汽车领域技术和经验的复用
A. Autopilot系统:Optimus使用的中央大脑计算SoC芯片、摄像头以及神经网络模型(如占用网络),均直接复用自动驾驶系统。但是,对于数据,则需要重新收集,以适配机器人的应用场景。
另外,还需要通过神经辐射场(Neural Radiance Field ,NeRF)技术对“占用网络”进行优化。可使其在机器人运行环境中生成更精准的体积深度渲染结果,提升环境感知的立体感与细节精度。
B.仿真模拟平台复用:特斯拉将机器人运动代码集成至汽车研发的仿真模拟器进行运动控制模拟。随着更多关节解锁,机器人行走步伐速度逐步加快。后续研发中,团队为模拟器新增手臂平衡等深度仿真功能。当研发场景从汽车转向机器人时,运动控制逻辑呈现显著差异:汽车控制更侧重路径规划,而机器人需优先考量步态能量效率—— 不同行走方式直接影响能耗,且维持身体平衡、避免跌倒与四肢协调配合是运动控制的核心目标。
C. 动力系统设计经验复用:特斯拉借鉴汽车动力系统的研发逻辑,首先针对Optimus 需完成的行走、上下楼等动作,分析其运动学和动力学数据,得出移动所需的时间、能耗、轨迹等关键参数,进而基于这些参数优化关节布局与执行器设计。
D.碰撞安全分析经验复用:基于汽车安全模拟分析能力打造机器人安全性,将汽车领域中用于交通事故模拟和安全优化的技术和方法应用于机器人,对机器人的运动和外部碰撞等情况进行模拟分析,通过软件优化和硬件保护等方式提升机器人系统的安全性。
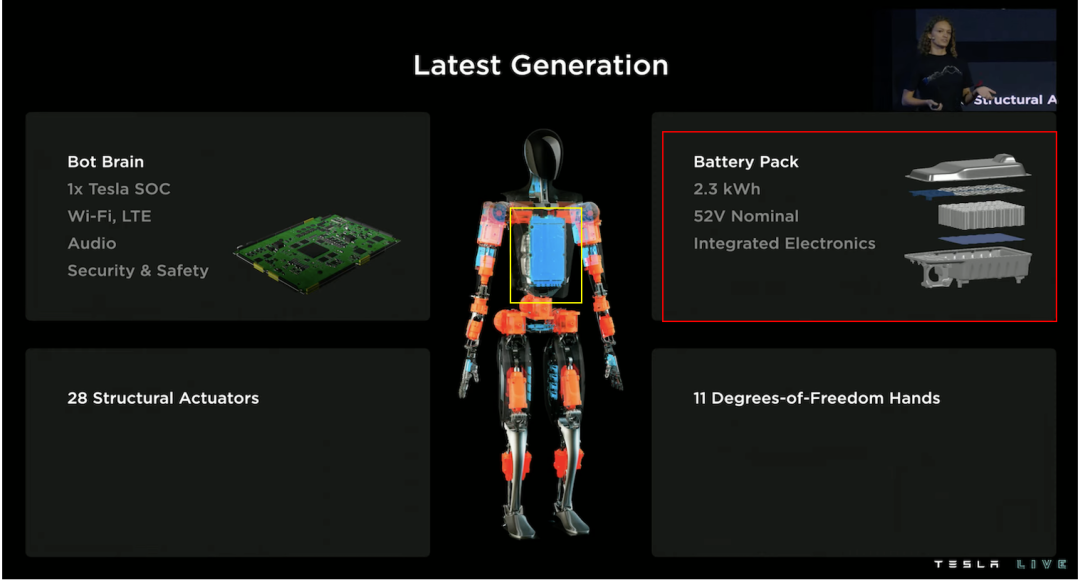
E. 电池模块设计经验复用:Optimus 所采用的电池包高度集成充电管理系统、传感器模块与冷却系统,直接借鉴了特斯拉在汽车电池设计中的经验,包括其成熟的电池管理系统(BMS)及散热技术,不仅确保电池安全高效运行,还能为机器人提供稳定电力供应。
F. Dojo数据中心资源共享:比如,利用Dojo 超级计算机的训练机制去提升机器人的性能,通过大量的数据训练和模型优化,使机器人能够不断学习,并适应不同的任务和环境。
不过,Dojo数据中心的资源共享不仅体现在算力和存储资源的物理共用,更体现在数据、算法和模型的跨场景复用。Dojo 作为特斯拉 AI 生态的 “中央大脑”,通过动态调度和协同优化,正在将汽车、机器人和能源系统整合为一个自我进化的智能网络,这一战略布局将持续强化特斯拉在人工智能领域的竞争优势。
2023年:第二代Optimus 发布
3. 2023年5月:特斯拉股东大会
2023年5月16日,特斯拉在股东大会上发布了 Optimus 的最新视频,展示了机器人在运动控制、环境感知、动作捕捉等方面的突破性进展。
1)运动控制与精准操作:视频中Optimus机器人的行走姿态更加自然流畅。另外,还展示了电机扭矩控制能力,能够精确控制力道,例如在演示中展示了按压鸡蛋而不碎裂的控制能力,体现了对细微力度的精准把控。
2)环境感知与记忆:Optimus 集成的感知与定位传感器(包括摄像头、IMU 等)与特斯拉FSD 视觉神经网络深度融合,实现了实时环境建图与路径记忆。视频中机器人在室外行走时,能自主识别障碍物并规划避障路径,同时通过视觉特征点匹配技术完成环境记忆,二次行走时可直接调用历史路径数据。

3)动作捕捉与技能迁移:特斯拉Optimus 通过多模态动作捕捉与端到端神经网络的无缝协同,实现了人类技能的快速迁移:工程人员佩戴 VR 头显与动作捕捉服进行操作,其动作序列被多传感器系统实时采集,经基于 Transformer 的端到端模型解析后,直接生成机器人关节控制参数。
4)端到端操作:在端到端操作中,系统仅需视觉输入即可完成复杂任务 —— 例如通过摄像头识别物体后,直接输出关节角度指令驱动灵巧手完成抓取,全程无需预设代码。
4. 2023年9月,特斯拉在X平台发布Optimus最新进展
2023年9月,特斯拉发布视频展示了Optimus的手臂和腿的自我校准、物品自主分类、单脚保持平衡等能力。
1)手臂和腿的自我校准:Optimus 通过多模态感知融合与端到端神经网络控制协同,实现腿和手臂的精准自我校准。在数据采集阶段,视觉传感器持续捕捉周围环境画面,同时记录腿、手臂在空间中的相对位置;高精度关节位置编码器则实时监测腿和手臂各关节的旋转角度、位移量等运动参数。
获取数据后,视觉传感器采集的图像数据与关节编码器记录的运动参数,会同步输入经过端到端训练的神经网络。借助多传感器融合技术,神经网络整合两类数据,构建出腿和手臂的三维运动模型,直观呈现肢体的实时状态。
最后,神经网络会对比模型中肢体的实际位置与目标位置,计算出两者的偏差。基于偏差值,神经网络生成精确的关节扭矩、速度等控制指令,驱动电机调整腿和手臂的关节运动,不断修正肢体位置,直至达到目标定位,完成自我校准。

2)物品自主分类:视频中展示,Optimus能够将蓝色和绿色积木分拣到对应颜色的托盘中。采用纯视觉感知方案,仅以图像作为神经网络的输入,并且无需借助云计算,便能在本地完成神经网络的运行 。这一特性使 Optimus 在面对分拣任务时,能够仅依靠视觉精准识别物体颜色,并基于端到端模式,实现 “视频输入,控制输出” 的流畅操作,完全自主地对色块进行颜色分类。
即使分拣过程中受到人为干扰(如积木被意外移动),Optimus也能快速感知变化并重新规划动作,持续高效地完成任务,体现了其出色的自主决策和环境适应能力。
3)身体平衡控制:视频中Optimus 不仅能稳定完成单脚平衡动作,还能做出瑜伽级的肢体拉伸姿态,展现出远超以往的身体控制精度与动作协调性。这一进展标志着特斯拉在机器人多关节协同控制、重心动态调整等核心领域实现了重大突破。

5. 2023年12月,特斯拉在X平台发布Optimus最新进展
2023年12月13日,特斯拉CEO马斯克在社交平台X(原Twitter)上首次线上发布Optimus第二代(Optimus Gen2)。相比Optimus Gen1(2023年3月发布),Optimus Gen2的进化主要体现在以下几个方面:
1)核心部件自研化:搭载特斯拉自主设计的传动装置与传感器,替代外采部件,提升系统兼容性与可控性;
2)感知范围升级:新增2 自由度颈部关节(可水平/俯仰转动),配合视觉系统扩大环境感知范围,更精准捕捉视觉信息;
3)机械结构轻量化:通过集成执行器的电子与线束系统,整机重量从73kg 降至 63kg(减重 10kg),同时步行速度提升 30%,运动效率显著优化;
4)足部仿生设计:参考人类足部几何结构,将趾部区域关节化,并增加力/扭矩传感器,提升地面反作用力感知能力与动态平衡精度;
5)运动控制突破:可凭借多关节协同控制算法,可完成深蹲、单腿平衡等复杂动作,全身运动协调性与平衡性较前代大幅提升;
6)末端执行器精细化:全新11自由度的灵巧手结构,每个手指均配备触觉传感器,能够完成捏鸡蛋、抓取细小物体等高精度操作,拓展应用场景边界。
6. 2024年5月,特斯拉在X平台发布Optimus最新进展
2024年5月5日,Tesla Optimus 官方账号在社交媒体 X 上发布了机器人分拣电池的视频。
从视频看技术进展:
1)端到端神经网络驱动的自主分拣
Optimus 通过完全端到端的神经网络直接处理 2D 摄像头、手部触觉及力传感器数据,无需中间编程逻辑即可生成关节控制序列。视频中,机器人能精准识别特斯拉电池的形状、位置,并将其插入托盘中,动作精度达到工业级标准 —— 在插入电芯时的容错率极低,神经网络可自动定位下一个空闲槽位。

2)动态纠错与自适应调整
当分拣过程中出现电池放置偏差时,Optimus 可通过触觉和视觉反馈自主识别错误并重新调整位置,无需人工干预。这体现了其闭环反馈系统的成熟度。这种实时纠错能力是传统工业机械臂难以企及的,标志着机器人从 “执行指令” 向 “自主优化” 的质变。

Optimus 在电池分拣中展现的精度、自主性及环境适应能力,展现了特斯拉机器人在工业场景中的突破性进展。
7. 2024年10月,特斯拉举办“We Robot” 活动
2024年10月11日,在“We Robot” 活动现场,Optimus展示了跳舞、倒酒、分发礼品、与观众互动等动作。
据了解,活动中Optimus 与观众的猜拳、对话、递饮料等互动环节,主要依赖人类操作员通过相关遥操作设备进行远程实时控制。现场视频显示,每台机器人附近都有特斯拉员工手持信号设备,随时准备干预。这种远程操控在调酒等精细任务中尤为关键 —— 机器人需要实时调整力度和角度以避免液体溢出,而目前的自主算法尚未完全可靠。
展示的新一代22自由度灵巧手是该活动为数不多的亮点之一。灵巧手采用空心杯电机+ 丝杠 + 绳驱方案。这22 个自由度分布为 5 根手指各 4 个自由度(含掌指关节外展/内收)及腕部 2 个自由度,最大程度模拟人类手部解剖结构。其驱动装置从手部移至前臂,通过肌腱(线绳)远程驱动手指,这种仿生设计使手部重量减轻 30%。
整体看来,这次活动带来惊喜并没有大家想象的那么多,且马斯克也未披露核心技术参数与量产时间表等关键信息。受市场预期落差影响,发布会次日特斯拉股价暴跌8.78%,创下两个月内最大单日跌幅。
也许是为了稳定投资者信心,特斯拉于10月17 日通过官方 X 平台账号发布 Optimus 最新进展视频,集中展示了视觉导航避障、非平坦地形自主行走、自主充电、重物搬运(单次负载达11kg)及爬楼梯等方面的能力,以作为对 “We Robot” 活动中缺失的机器人研发进展介绍的补充。
从视频看技术进展:
1)自主导航与环境感知
自主探索未知空间:Optimus 可以利用计算机上运行的神经网络避开人和障碍物,自主探索看不见的空间,还能实时规划路线,识别物体的颜色、形状、大小等信息,这表明其视觉导航和环境感知能力有了很大提升,能够在复杂且不确定的环境中独立行动。

多机器人协同环境建模:类似汽车领域的众包地图模式,多个Optimus 机器人能够共同建立对周围环境的共享认知和记忆,通过协同工作构建详细的环境数字模型,有助于它们更好地理解环境,实现更复杂的任务,为多机器人协作在工业场景或其他领域的应用提供了技术基础。
2)自主充电
精准自主充电:Optimus 可以定位并自行导航到最近的充电口,然后使用后置摄像头实现准确的自行充电,充完电后还能自主回到工作站继续工作。这一功能展示了其在长时间工作中的自我维护能力,使其能够在高负载的情况下持续运营,对于实际应用中机器人的自主性和实用性至关重要。
3)负载与运动能力提升
重物搬运:Optimus 现在可以承载较大的有效载荷,如能拿起和搬运 11 公斤的电池托盘,并可自主规划路线将物体搬运到多个目标点,且连续作业能力倍增,这显示出其动力系统和结构设计的优化,以及对物体重量和平衡的精准控制能力。

复杂地形适应:Optimus 能够在非平坦地形行走,甚至可以走上楼梯,运动空间从地面扩展到高处,展示了其出色的动态平衡能力和对多样环境的适应性,大幅扩展了其应用范围。
4)人机交互能力增强
自然互动:Optimus 能够通过 AI 与人互动,根据人的手势和语音请求,自主地将不同的物品递交给互动者,还能做出如击拳等动作,表现出一定的社交能力和服务能力,说明其在语音识别、语义理解和动作执行的协同方面取得了进步,更接近在家庭和商业环境中的实际应用。
5)神经网络技术优化
单神经网络学习多任务:视频中强调这些新技能都是由Optimus 嵌入式计算机上实时运行的单个神经网络学习到的,这意味着其 AI 模型具有很强的泛化能力,可以学习多种任务,而不是通过多个不同的模型或系统来实现,体现了特斯拉在神经网络架构和算法优化方面的成果,使机器人能够更高效地学习和适应不同场景。
8. 2024年11月,特斯拉在X平台发布Optimus最新进展
2024年11月28日,特斯拉X平台官方账号发布Optimus接网球演示视频。视频中,机器人快速追踪并拦截快速移动着的网球,实现快速响应,稳定接球,体现出Optimus强大的空间感知能力。对于网球这类小体积物体的稳定抓取,背后需要精准的手指协调与压力控制,以及关节与执行器的协作能力。
根据特斯拉机Optimus项目副总裁Milan Kovac透露,此次展示的灵巧手拥有22个自由度,手腕和前臂部分也增加了3个自由度(手腕和前臂各有3个自由度),这种设计使得整个手臂系统更加灵活,使其能够更容易完成抓握、松开等复杂动作。
从视频看技术进展:
1)多部位协同运动:接球过程中,机器人不仅依靠手部动作,还需协调身体姿态、左臂摆动及头部动作以保持平衡,动作连贯性接近人类。
2)高速视觉识别与反馈能力:要成功完成隔空接住网球的任务,Optimus需要具备高速度的视觉识别与反馈能力。网球的运动轨迹变化迅速且难以预测,这要求机器人必须具备极高的响应速度和精确度。Optimus在这方面的表现令人印象深刻,证明了其在复杂任务处理上的巨大潜力。
3)手指手掌的柔韧性和保护层:为了稳定地完成接球动作,Optimus的手指和手掌需要具备足够的柔韧性和顺从性,同时还需要一个稳定的外保护层。这些特性共同确保了机器人能够在不损伤自身的情况下,准确而可靠地抓住快速移动的物体。
局限性:自主性尚未完全实现,视频中的动作依赖远程操作,而非完全自主决策。视频虽通过远程操作完成,但低延迟特性(接近实时响应)验证了其运控系统的可靠性,为未来完全自主操作奠定了基础。
Milan Kovac发文称,接下来的改进方向是扩大手部触觉感受面积,肌腱的精细控制,以及前臂减重等。另外就是在不影响触觉感受器的敏感度的前提下,让手指和手掌拥有足够柔软度/柔顺性的保护层。
9. 2024年12月,特斯拉在X平台发布Optimus最新进展
2024年12月10日,特斯拉机器人官方账号在X平台上发布Optimus在户外上下坡视频。视频展示了 Optimus 在复杂地形上的行走能力。
特斯拉Optimus 项目副总裁米兰・科瓦奇(Milan Kovic)转发该视频时,透露了一些关键技术细节:机器人在全程未启用视觉系统的情况下,完全依靠自身的平衡能力来应对复杂地形(据业内人士推断可能是基于脚部六维力传感器 + 关节力矩反馈构成的纯力学感知闭环实现平衡控制)。
另外,他还特别指出,他自己曾在 Optimus 行走的位置滑倒过,更加凸显了该地形的复杂程度。而 Optimus 凭借动态扭矩调整算法和仿生踝关节缓冲结构,不仅以稳定步速完成斜坡上下行,更在突发打滑时通过下肢肌肉模拟驱动实现动态纠偏,展现了较强的反应速度的地形适应能力。
从视频看技术进展:
-
强大的平衡能力:Optimus 在没有使用视觉系统的情况下,仅依靠自身的平衡能力应对复杂地形。它在上下坡过程中,尽管姿势略显笨拙,但步速与普通人差不多,且全程没有摔倒。有一次下坡时虽略有脚滑,但其下肢和上肢迅速作出反应,保持了平衡。这表明特斯拉在机器人的力控感知和平衡控制技术方面取得了显著进步。
-
较强的自学习能力:特斯拉团队选择了三个地点进行下坡实验,在同一地点第二次下坡时,Optimus 的动作整体上要比第一次下坡时更流畅。从最陡的一个坡做实验时,第一次下坡时,Optimus“脚底打滑”,差点摔倒;然而,第二次下坡时,却是以流畅的动作完成了下坡。这展示了Optimus具有强大的自学习能力,神经网络模型从一次行走中学习并改进下一次的表现,体现了特斯拉在机器人自主学习和优化行为模式方面的技术进步。

另外,特斯拉Optimus 项目副总裁Milan Kovic进一步透露,团队正围绕四个方向推进技术迭代:
-
融入视觉感知,让机器人能够更好地提前做好动作规划。
-
运动控制优化,让机器人在崎岖地形中实现更自然的步态。
-
提升动态响应速度,让机器人对速度/方向指令反应更灵敏。
-
防摔倒自我保护机制,尽量避免摔倒,即使在机器人预判到不可避免的摔倒时,能够自动实施保护措施,将伤害降至最低,并且还能再自动站立起来。
2025年:用舞蹈征服世界
10. 2025年5月,特斯拉在X平台发布Optimus最新进展
2025年5月14日,特斯拉机器人官方账号在X平台上发布Optimus最新跳舞视频。视频中,机器人开场便以单腿站立的芭蕾舞姿亮相,流畅完成鬼步舞、机械舞等多种舞蹈风格动作,尤其是完成了高难度的单脚旋转动作。其姿态优雅、动作协调,细腻程度直逼人类舞者。
机器人所展示的舞蹈动作,完全通过仿真训练生成,100% 是在仿真环境中学习所得,无需额外借助真实数据进行微调,也没有人类远程干预。
从视频看技术进展
1)Sim-to-real RL(从仿真到现实的强化学习):这项技术通过在虚拟环境中模拟现实物理规则,构建数百万种可能的物理场景。先在模拟环境中训练AI模型,然后再将学到的策略直接应用到现实世界的机器人系统中。
在模拟仿真环境中,擎天柱(Optimus)的AI系统经历海量试错与策略优化,学习如何在动态平衡中完成复杂动作(如单腿站立、旋转、滑步等),随后将虚拟环境中习得的控制策略直接迁移至现实世界的机器人本体。
挑战在于模拟和现实之间的差距(Sim-to-Real Gap)。特斯拉可能在跨越这种差距的技术上实现重大进展。例如通过改进物理引擎建模精度、增强传感器反馈校准算法等,实现了虚拟训练成果到真实机器人动作的高效映射。
2)Zero-shot(“零样本”学习):指模型无需接触真实环境数据,便可直接将模拟环境中习得的策略应用于现实场景并完成任务。
这意味着Optimus 的AI模型具备极强的泛化性 —— 其无需依赖额外的现实世界数据进行微调,即可将虚拟训练中掌握的动作控制逻辑(如平衡算法、运动轨迹规划等)直接复用到物理机器人,实现从仿真到现实的 “无缝迁移”。
3)推理计算全部由Optimus单机完成:系统无需依赖外部服务器或云端计算资源,从感知环境、决策规划到动作控制均在设备端实时完成。这不仅展现了Optimus 高效的硬件性能与优化的算法,更体现了其具备极强的量产潜力与实际应用价值 —— 本地化计算架构可大幅降低对外部基础设施的依赖,进而为复杂场景下的自主作业和规模化部署奠定基础。