条件随机场 (CRF) 原理及其在语义分割中的应用
条件随机场 (CRF) 原理及其在语义分割中的应用
一、条件随机场的原理
条件随机场 (Conditional Random Fields, CRF) 是一种判别式概率无向图模型。它用于在给定观测序列 (如图像中的像素) 的条件下,对另一组序列 (如像素的语义标签) 进行建模和预测。
与生成式模型 (如隐马尔可夫模型 HMM) 不同,CRF 直接对条件概率 P ( Y ∣ X ) P(Y|X) P(Y∣X) 建模,而不是对联合概率 P ( X , Y ) P(X,Y) P(X,Y) 建模 (其中 X X X 是观测序列, Y Y Y 是待预测的标签序列)。这使得 CRF 在建模时可以利用 X X X 中的复杂特征,而无需担心这些特征之间的依赖关系,因为 CRF 不会对 X X X 的概率分布进行建模。
CRF 的核心思想:
- 马尔可夫随机场 (Markov Random Field, MRF): CRF 是 MRF 的一种特殊形式。MRF 是一种无向图模型,图中的每个节点代表一个随机变量,边代表变量之间的依赖关系。MRF 具有马尔可夫性,即给定邻居节点,一个节点的状态与其他节点无关。
- 条件性: CRF 的"条件性"体现在它对条件概率 P ( Y ∣ X ) P(Y|X) P(Y∣X) 进行建模。这意味着我们关心的是在已知观测 X X X 的情况下,标签序列 Y Y Y 的概率分布。
- 特征函数 (Feature Functions): CRF 的强大之处在于它能够灵活地定义特征函数。特征函数 f k ( Y , X , i ) f_k(Y, X, i) fk(Y,X,i) 描述了观测序列 X X X 和标签序列 Y Y Y 在位置 i i i 处的一些特性。这些特性可以是任意的,例如:
- 某个像素的颜色值与其标签的关系。
- 相邻像素具有相同标签的可能性。
- 某个像素的纹理特征与其标签的关系。
- 参数学习: 每个特征函数都有一个对应的权重 λ k \lambda_k λk。CRF 的学习过程就是通过训练数据来估计这些权重,使得在给定观测 X X X 时,模型能够更好地预测出正确的标签序列 Y Y Y。
- 概率计算: 给定观测序列 X X X,标签序列 Y Y Y 的条件概率可以表示为:
P ( Y ∣ X ) = 1 Z ( X ) exp ( ∑ k ∑ i λ k f k ( y i , y i − 1 , X , i ) ) P(Y|X) = \frac{1}{Z(X)} \exp\left(\sum_k \sum_i \lambda_k f_k(y_i, y_{i-1}, X, i)\right) P(Y∣X)=Z(X)1exp(k∑i∑λkfk(yi,yi−1,X,i))
其中:- y i y_i yi 是位置 i i i 的标签。
- f k ( y i , y i − 1 , X , i ) f_k(y_i, y_{i-1}, X, i) fk(yi,yi−1,X,i) 是在位置 i i i 处定义的特征函数,它可能依赖于当前标签 y i y_i yi、前一个标签 y i − 1 y_{i-1} yi−1 (对于序列数据) 以及整个观测序列 X X X。在图像中,它通常会考虑当前像素的标签、邻近像素的标签以及图像特征。
- λ k \lambda_k λk 是与特征函数 f k f_k fk 相关联的权重。
- Z ( X ) Z(X) Z(X) 是归一化因子,也称为配分函数 (partition function),它确保所有可能的标签序列 Y Y Y 的概率之和为 1。计算 Z ( X ) Z(X) Z(X) 通常是 CRF 中计算复杂度最高的部分。
Z ( X ) = ∑ Y exp ( ∑ k ∑ i λ k f k ( y i , y i − 1 , X , i ) ) Z(X) = \sum_Y \exp\left(\sum_k \sum_i \lambda_k f_k(y_i, y_{i-1}, X, i)\right) Z(X)=Y∑exp(k∑i∑λkfk(yi,yi−1,X,i))
- 推断 (Inference): 在学习到模型参数后,对于新的观测序列 X X X,我们需要找到最可能的标签序列 Y ∗ Y^* Y∗,即:
Y ∗ = arg max Y P ( Y ∣ X ) Y^* = \arg\max_Y P(Y|X) Y∗=argmaxYP(Y∣X)
于序列标注),可以使用 Viterbi 算法进行高效推断。对于更一般的图结构 (如图像网格),推断问题通常是 NP-hard 的,需要使用近似推断算法,如信念传播 (Belief Propagation)、图割 (Graph Cuts) 或均值场 (Mean Field) 等。
总结 CRF 的优点:
- 判别式模型: 直接对条件概率建模,通常能获得比生成式模型更高的预测精度。
- 灵活性: 可以定义非常丰富的、全局性的特征,捕捉观测数据和标签之间的复杂依赖关系。
- 克服标签偏置问题: 相较于最大熵马尔可夫模型 (MEMM),CRF 通过全局归一化解决了标签偏置问题。
二、CRF 在语义分割中的应用
在语义分割任务中,目标是将图像中的每个像素分配一个语义标签 (例如,“人”,“汽车”,"天空"等)。
CRF 如何应用于语义分割?
-
将图像视为一个图:
- 图像中的每个像素可以看作是图中的一个节点。
- 节点之间的边可以连接邻近的像素。
-
一元势能 (Unary Potentials / Likelihood Term):
- 这部分通常由一个深度卷积神经网络 (DCNN,如 FCN, U-Net, DeepLab 等) 提供。
- 对于每个像素 i i i,DCNN 会输出一个概率分布 P ( l i ∣ X ) P(l_i|X) P(li∣X),表示该像素属于各个语义标签 l i l_i li 的概率。这个概率可以看作是 CRF 模型中的一元势能 ψ u ( l i ) \psi_u(l_i) ψu(li)。
- 它反映了单个像素自身的特征 (如颜色、纹理,由 DCNN 提取) 与其可能的标签之间的关系。
- 形式上,可以定义为 ψ u ( l i ) = − log P ( l i ∣ X ) \psi_u(l_i) = -\log P(l_i|X) ψu(li)=−logP(li∣X)。
-
成对势能 (Pairwise Potentials / Smoothness Term / Prior Term):
- 这部分用于建模像素之间的关系,鼓励标签的平滑性,即相邻像素倾向于具有相同的标签,除非它们之间存在明显的边界。
- 常用的成对势能函数是基于高斯核的:
ψ p ( l i , l j ) = μ ( l i , l j ) ∑ m = 1 K w m k m ( f i , f j ) \psi_p(l_i, l_j) = \mu(l_i, l_j) \sum_{m=1}^{K} w_m k_m(\mathbf{f}_i, \mathbf{f}_j) ψp(li,lj)=μ(li,lj)m=1∑Kwmkm(fi,fj)
其中:- l i , l j l_i, l_j li,lj 是像素 i i i 和 j j j 的标签。
- μ ( l i , l j ) \mu(l_i, l_j) μ(li,lj) 是一个标签兼容性函数。最简单的是 Potts 模型: μ ( l i , l j ) = [ l i e q l j ] \mu(l_i, l_j) = [l_i eq l_j] μ(li,lj)=[lieqlj] (如果标签不同则为1,否则为0),它惩罚相邻像素具有不同标签的情况。
- w m w_m wm 是每个核的权重。
- k m ( f i , f j ) k_m(\mathbf{f}_i, \mathbf{f}_j) km(fi,fj) 是高斯核函数,它依赖于像素 i i i 和 j j j 的特征 f i , f j \mathbf{f}_i, \mathbf{f}_j fi,fj。常用的特征包括:
- 外观核 (Appearance Kernel): 基于像素的颜色 (或强度) 差异和空间位置差异。
k 1 ( f i , f j ) = w 1 exp ( − ∥ p i − p j ∥ 2 2 σ α 2 − ∥ I i − I j ∥ 2 2 σ β 2 ) k_1(\mathbf{f}_i, \mathbf{f}_j) = w_1 \exp\left(-\frac{\|p_i - p_j\|^2}{2\sigma_\alpha^2} - \frac{\|I_i - I_j\|^2}{2\sigma_\beta^2}\right) k1(fi,fj)=w1exp(−2σα2∥pi−pj∥2−2σβ2∥Ii−Ij∥2)
其中 p i , p j p_i, p_j pi,pj 是像素位置, I i , I j I_i, I_j Ii,Ij 是像素颜色值。这个核鼓励颜色相似且空间上接近的像素拥有相同的标签。 - 平滑核 (Smoothness Kernel): 仅基于像素的空间位置差异,鼓励局部平滑。
k 2 ( f i , f j ) = w 2 exp ( − ∥ p i − p j ∥ 2 2 σ γ 2 ) k_2(\mathbf{f}_i, \mathbf{f}_j) = w_2 \exp\left(-\frac{\|p_i - p_j\|^2}{2\sigma_\gamma^2}\right) k2(fi,fj)=w2exp(−2σγ2∥pi−pj∥2)
这个核鼓励小范围内的标签一致性,有助于消除小的噪声区域。
- 外观核 (Appearance Kernel): 基于像素的颜色 (或强度) 差异和空间位置差异。
-
能量函数:
结合一元势能和成对势能,CRF 的目标是最小化以下能量函数 (等价于最大化后验概率):
E ( L ) = ∑ i ψ u ( l i ) + ∑ i , j ∈ N ψ p ( l i , l j ) E(L) = \sum_i \psi_u(l_i) + \sum_{i,j \in \mathcal{N}} \psi_p(l_i, l_j) E(L)=i∑ψu(li)+i,j∈N∑ψp(li,lj)
其中 L = { l 1 , l 2 , . . . , l N } L = \{l_1, l_2, ..., l_N\} L={l1,l2,...,lN} 是所有像素的标签集合, N \mathcal{N} N 表示像素邻域关系。 -
全连接 CRF (Fully Connected CRF / Dense CRF):
- 在传统的 CRF 中,成对势能通常只考虑局部邻域 (例如,4邻域或8邻域)。
- DeepLab 系列模型推广了 全连接 CRF 的概念。在全连接 CRF 中,每个像素都与其他所有像素通过成对势能连接起来。
- 这使得模型能够捕捉长距离的依赖关系,从而产生更精细、更符合图像真实边界的分割结果。
- 尽管全连接 CRF 的图非常稠密,但由于高斯核的特性,可以使用高效的均值场近似推断算法在 O ( N ) O(N) O(N) 的时间内求解 (其中 N N N 是像素数量),这使得它在实践中是可行的。
CRF 作为后处理步骤:
- 在许多现代语义分割框架中,CRF (特别是全连接 CRF) 通常作为深度学习模型输出的后处理步骤。
- DCNN 首先提供一个初始的、可能有些粗糙的像素级概率图。
- 然后,CRF 利用这些概率作为一元势能,并结合像素间的颜色和位置信息 (成对势能) 来优化分割结果,使得分割边界更加平滑,并且更好地贴合图像中的真实物体边界。
- 这样做的好处是结合了 DCNN 强大的特征提取能力和 CRF 精细化边界的能力。
优点:
- 能够显著改善分割结果的边界质量,使其更平滑、更精确。
- 能够消除由 DCNN 产生的一些小的、孤立的错误分割区域。
- 全连接 CRF 能够捕捉长距离依赖,有助于分割大目标和区分具有相似外观但在空间上分离的物体。
缺点/挑战:
- 参数调整: CRF 中的高斯核参数 ( σ α , σ β , σ γ \sigma_\alpha, \sigma_\beta, \sigma_\gamma σα,σβ,σγ) 和权重 ( w m w_m wm) 通常需要仔细调整,这可能比较耗时。
- 计算成本: 尽管有高效的近似推断算法,但与纯 DCNN 推断相比,CRF 仍然会增加额外的计算开销。
- 端到端训练: 将 CRF 与 DCNN 进行端到端训练比较困难,尽管有一些研究工作尝试解决这个问题 (例如,将 CRF 的推断步骤展开为神经网络层)。大多数情况下,CRF 仍然作为独立的后处理步骤。
三、实验
我们采用一个简单的语义分割模型对VOC的一个实例进行推理:

接着我们通过一下脚本来进行后处理:
import numpy as np
import pydensecrf.densecrf as dcrf
from pydensecrf.utils import unary_from_labels, create_pairwise_bilateral, create_pairwise_gaussian
from PIL import Image
import matplotlib.pyplot as plt
import matplotlib.font_manager as fm
import os
import warnings
warnings.filterwarnings('ignore') # 忽略警告信息def apply_crf(image_path, predicted_mask_path, output_path,crf_iterations=5, pairwise_gaussian_sdims=(3, 3), pairwise_gaussian_compat=3,pairwise_bilateral_sdims=(80, 80), pairwise_bilateral_schan=(13, 13, 13),pairwise_bilateral_compat=10, unary_gt_prob=0.7):"""对预测的分割掩码应用密集条件随机场(DenseCRF)进行后处理参数说明:image_path (str): 原始RGB图像路径predicted_mask_path (str): 预测分割掩码路径(灰度图或索引色图)output_path (str): 保存CRF优化后掩码的路径crf_iterations (int): CRF迭代次数(次数越多处理越精细,但耗时更长)pairwise_gaussian_sdims (tuple): 高斯成对项的空间标准差(控制局部平滑范围)pairwise_gaussian_compat (int): 高斯成对项的兼容性权重(权重越大平滑效果越明显)pairwise_bilateral_sdims (tuple): 双边成对项的空间标准差(控制颜色感知范围)pairwise_bilateral_schan (tuple): 双边成对项的RGB标准差(控制颜色相似度敏感度)pairwise_bilateral_compat (int): 双边成对项的兼容性权重(权重越大颜色一致性越强)unary_gt_prob (float): 一元势中预测标签的置信度(取值范围0-1,值越大越信任原始预测)"""try:# ---------------------- 1. 加载图像和预测掩码 ----------------------img = Image.open(image_path).convert('RGB') # 读取原始图像并转为RGB格式img_np = np.array(img, dtype=np.uint8) # 转为NumPy数组predicted_mask_img = Image.open(predicted_mask_path) # 读取预测掩码# 处理不同格式的掩码(灰度图/索引图/RGB图)if predicted_mask_img.mode == 'P': # 索引色图(调色板模式)# 转换为灰度图(需根据实际标签存储方式调整)predicted_mask_img = predicted_mask_img.convert('L')elif predicted_mask_img.mode in ['RGB', 'RGBA']: # RGB/RGBA彩色掩码print("警告:检测到RGB掩码,将转为灰度图提取标签。\n""如果掩码通过颜色映射不同类别,需自定义颜色到标签的映射逻辑!")predicted_mask_img = predicted_mask_img.convert('L') # 临时转为灰度图labels_np = np.array(predicted_mask_img, dtype=np.int32) # 转为标签数组# 检查图像与掩码尺寸是否一致if img_np.shape[:2] != labels_np.shape:print(f"错误:图像尺寸{img_np.shape[:2]}与掩码尺寸{labels_np.shape}不匹配,正在调整掩码大小...")# 按最近邻插值缩放掩码至图像尺寸predicted_mask_img_resized = predicted_mask_img.resize((img_np.shape[1], img_np.shape[0]), Image.NEAREST)labels_np = np.array(predicted_mask_img_resized, dtype=np.int32)H, W = img_np.shape[:2] # 获取图像高宽# ---------------------- 2. 分析掩码中的类别信息 ----------------------unique_labels = np.unique(labels_np) # 获取掩码中的唯一标签n_labels = len(unique_labels) # 类别总数print(f"检测到{len(unique_labels)}个唯一标签:{unique_labels}")if n_labels <= 1:print("警告:掩码中仅存在1个或0个标签,CRF处理可能无效或失败!")# 直接保存原始掩码predicted_mask_img.save(output_path)print(f"已将原始掩码保存至:{output_path}")return# 映射标签为连续整数(如原始标签为[255, 0] → 映射为[1, 0])label_map = {label: i for i, label in enumerate(unique_labels)}mapped_labels_np = np.copy(labels_np)for original_label, new_label in label_map.items():mapped_labels_np[labels_np == original_label] = new_label# ---------------------- 3. 构建一元势(Unary Potentials) ----------------------# 根据标签生成一元势矩阵(假设预测标签的置信度为unary_gt_prob)unary = unary_from_labels(mapped_labels_np, n_labels, gt_prob=unary_gt_prob, zero_unsure=False)unary = np.ascontiguousarray(unary) # 确保数组内存连续# ---------------------- 4. 初始化DenseCRF模型 ----------------------d = dcrf.DenseCRF2D(W, H, n_labels) # 创建二维CRF模型d.setUnaryEnergy(unary) # 输入一元势# ---------------------- 5. 添加成对势(Pairwise Potentials) ----------------------# ① 高斯成对势:鼓励相邻像素标签一致(实现局部平滑)d.addPairwiseGaussian(sxy=pairwise_gaussian_sdims, # 空间标准差(控制平滑范围)compat=pairwise_gaussian_compat, # 兼容性权重(权重越大平滑越强)kernel=dcrf.DIAG_KERNEL, # 对角线核(计算效率更高)normalization=dcrf.NORMALIZE_SYMMETRIC # 对称归一化)# ② 双边成对势:结合图像颜色信息,鼓励颜色相似的相邻像素标签一致img_np_contiguous = np.ascontiguousarray(img_np) # 确保图像数组内存连续d.addPairwiseBilateral(sxy=pairwise_bilateral_sdims, # 空间标准差(控制颜色感知范围)srgb=pairwise_bilateral_schan, # RGB标准差(控制颜色相似度敏感度)rgbim=img_np_contiguous, # 输入图像compat=pairwise_bilateral_compat, # 兼容性权重(权重越大颜色一致性越强)kernel=dcrf.DIAG_KERNEL,normalization=dcrf.NORMALIZE_SYMMETRIC)# ---------------------- 6. 执行CRF推理 ----------------------print("正在执行CRF推理...")Q = d.inference(crf_iterations) # 迭代优化标签概率分布# ---------------------- 7. 解析优化结果并恢复原始标签 ----------------------# 提取概率最大的标签作为最终结果map_result = np.argmax(Q, axis=0).reshape((H, W))# 映射回原始标签值(如0→255,1→0等)final_result_np = np.copy(map_result)reverse_label_map = {v: k for k, v in label_map.items()}for new_label, original_label in reverse_label_map.items():final_result_np[map_result == new_label] = original_label# ---------------------- 8. 保存结果并可视化对比 ----------------------result_img = Image.fromarray(final_result_np.astype(np.uint8)) # 转为图像对象result_img.save(output_path) # 保存优化后的掩码print(f"已将CRF优化后的掩码保存至:{output_path}")# 可视化原始图像、输入掩码、输出掩码(可选)fig, axes = plt.subplots(1, 3, figsize=(15, 5))axes[0].imshow(img)axes[0].set_title('原始图像')axes[0].axis('off')axes[1].imshow(labels_np, cmap='gray') # 显示原始标签(输入掩码)axes[1].set_title('预测掩码(输入)')axes[1].axis('off')axes[2].imshow(final_result_np, cmap='gray') # 显示CRF优化后的标签(输出掩码)axes[2].set_title('CRF优化掩码(输出)')axes[2].axis('off')plt.show()except FileNotFoundError:print(f"错误:未找到输入文件!\n查找路径:图像={image_path},掩码={predicted_mask_path}")except Exception as e:print(f"处理过程中发生错误:{str(e)}")if __name__ == '__main__':# ---------------------- 配置参数 ----------------------original_image_file = "2007_000032.png" # 原始图像路径(需替换为实际路径)predicted_mask_file = "2007_000032_mask.png" # 预测掩码路径(需替换为实际路径)output_refined_mask_file = "2007_000032_crf_refined_mask.png" # 输出路径# CRF参数配置(需根据实际数据调参)ITERATIONS = 500 # CRF迭代次数(建议取值50-200,数值越大效果越精细但耗时越长)UNARY_GT_PROB = 0.95 # 一元势中预测标签的置信度(建议0.8-0.95)# 高斯成对势参数GAUSS_SXY = (3, 3) # 空间标准差(控制局部平滑范围,建议2-5)GAUSS_COMPAT = 2 # 兼容性权重(建议1-5,数值越大平滑效果越明显)# 双边成对势参数BI_SXY = (40, 40) # 空间标准差(控制颜色感知范围,建议20-100)BI_SRGB = (7, 7, 7) # RGB标准差(控制颜色相似度,建议3-10)BI_COMPAT = 10 # 兼容性权重(建议5-20,数值越大颜色一致性越强)# ---------------------- 结束配置 ----------------------print("开始CRF后处理...")apply_crf(original_image_file,predicted_mask_file,output_refined_mask_file,crf_iterations=ITERATIONS,pairwise_gaussian_sdims=GAUSS_SXY,pairwise_gaussian_compat=GAUSS_COMPAT,pairwise_bilateral_sdims=BI_SXY,pairwise_bilateral_schan=BI_SRGB,pairwise_bilateral_compat=BI_COMPAT,unary_gt_prob=UNARY_GT_PROB)print("CRF后处理完成!")
结果如下:
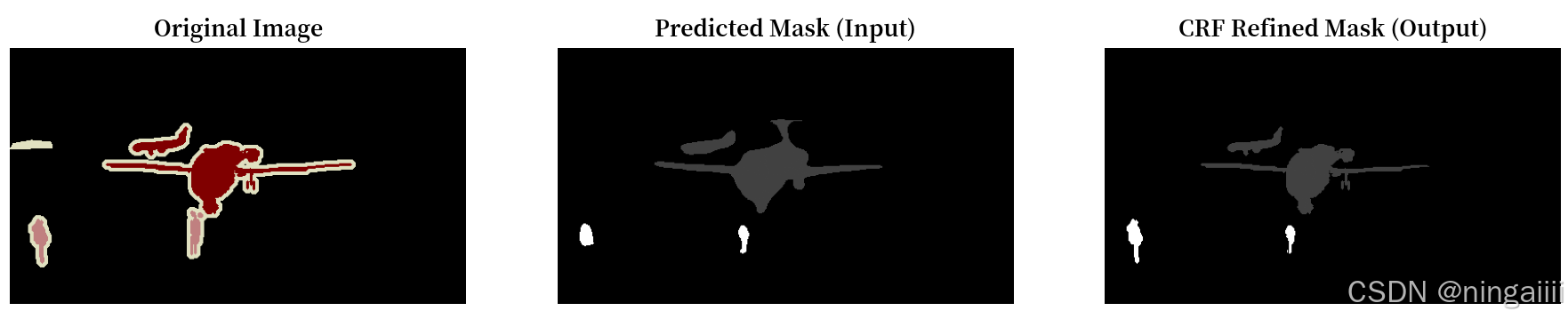
可以看到CRF确实提高了分割的精度。
注 : pydensecrf库可以从一下命令来下载
pip install git+https://github.com/lucasb-eyer/pydensecrf.git