关于光谱相机的灵敏度
一、灵敏度的核心定义
光谱灵敏度(单色灵敏度)
描述光谱相机对单色辐射光的响应能力,即探测器对特定波长入射光的输出信号强度与入射光功率的比值。
例如,若在680nm波长下的光谱灵敏度较高,则表示该相机对此波长的光信号捕捉能力更强,适用于叶绿素检测等场景(比如汇能感知光谱相机VSC02UA)。

积分灵敏度
衡量相机对连续宽波段入射光的整体响应能力,通常以输出电流或电压与总辐射通量的比值表示。
适用于需要全光谱覆盖的应用(如环境光强度测量或工业检测)。
二、灵敏度的影响因素
探测器材料特性
探测器的量子效率(如硅基CMOS对可见光敏感,InGaAs对近红外敏感)直接影响特定波长的光谱灵敏度。
光路设计
光栅效率和分光元件(如棱镜、滤光片)的透射率会限制入射光能量,进而影响灵敏度。
信号处理能力
高ISO值可通过放大电信号提升表观灵敏度,但可能引入噪声,需平衡信噪比(SNR)。
三、典型应用对灵敏度的需求
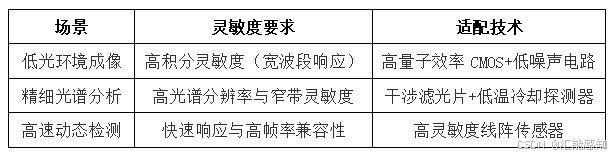
光谱相机的灵敏度需从单波长响应精度(光谱灵敏度)和宽波段响应能力(积分灵敏度)两个维度综合评估,其性能受探测器材料、光路设计及信号处理算法的共同影响。实际应用中需根据场景需求(如检测波段、环境光强)平衡灵敏度与信噪比等参数。
👇点击以下名片,获取更多产品资料👇
欢迎咨询,欢迎交流