4.重建大师菜单栏介绍
摘要:本文主要介绍重建大师菜单栏,包含:工程、区块、设置、工具(瓦片匀色、格式转换、生成快拼DOM、航迹线检查合并、合并DOM/DSM、模型原点规划)以及帮助。
1.工程
点击菜单栏中的工程,弹出列表框如下表所示:
表 工程菜单
| 新建工程 | 建立新工程(Ctrl+N) |
| 打开工程 | 打开已有工程(Ctrl+O) |
| 最近工程 | 打开最近八次保存过的工程 |
| 保存工程 | 保存当前工程(Ctrl+S) |
| 清理工程 | 清理当前工程缓存和中间文件 |
| 关闭工程 | 关闭当前工程 |
| 结束 | 结束当前工程,并退出软件页面(Ctrl+W) |
1.1清理工程
在工程备份前,保留原有工程目录结构、空三结果,最大限度减少空间磁盘占用。熟练使用重建大师的用户,可根据自身需求随时清理工程,工程中有运行任务时工具无法使用。
使用清理工程工具,可快速清理工程缓存、区块缓存、重建缓存、重建瓦片中间文件和产品日志。
图 清理工程
2.区块
表 区块菜单
| 保存区块 | 区块操作后,保存才生效 |
| 导入区块 | 支持导入xml、xbin格式的空三文件 |
| 导出区块 | 导出区块相关内容 |
| 导出区块展点图 | 导出区块的展点图片 |
| 照片路径修改 | 修改区块中原有记录的照片路径至现有照片路径 |
| 打开区块目录 | 跳转至区块目录,查看区块目录结构 |
2.1导出区块

图 区块导出界面
表 导出区块功能对照表
| 导出目录 | - |
| 导出格式 | 支持导出xml、xbin、Patb格式的空三文件 |
| 空间坐标系 | 导出空三成果坐标系,支持坐标系转换 |
| 角元素形式 | 支持旋转矩阵、OPK |
| 相机方向 | 根据需求选择相机方向,内含8种 |
| 导出连接点 | 空三成果支持导出\不导出连接点 |
| 导出无畸变影像 | 支持无畸变影像导出 |
| 分块导出 | 支持空三自动分块导出 |
| 导出位置 | 支持单独以txt格式导出原始位姿、计算位姿、连接点位置 |
| 导出影像 | 支持导出区块中的照片,并具备下视筛选功能 |
2.2导出区块展点图
导出指定区块的POS点位,导出格式为JPG或PDF。
图 区块展点图导出界面
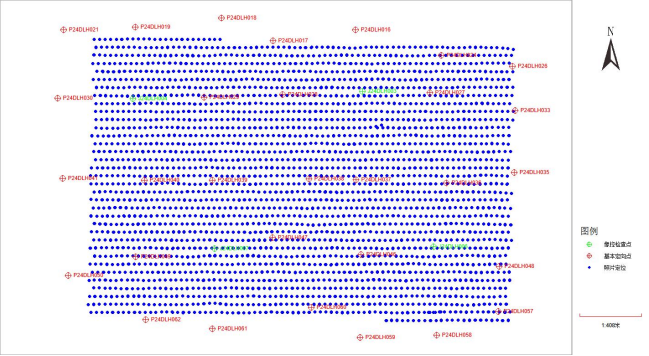
图 区块展点图
2.3照片路径修改
照片路径发生变化时,可使用该功能对指定区块做批量照片路径修改。选择到目录最末端文件夹,若照片目录结构未发生变化,可一键识别替换。
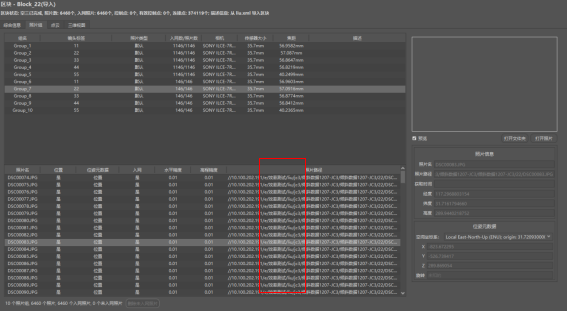
图 照片路径修改前
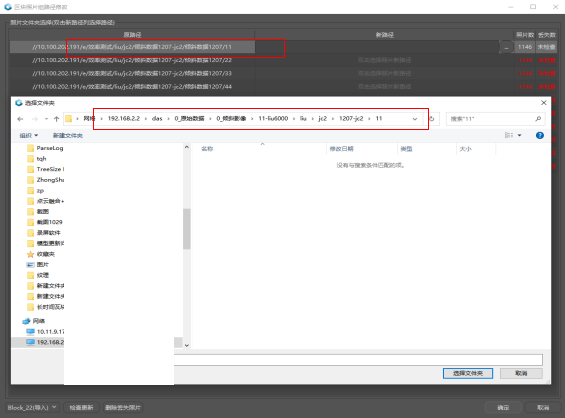
图 文件选择到目录最末端
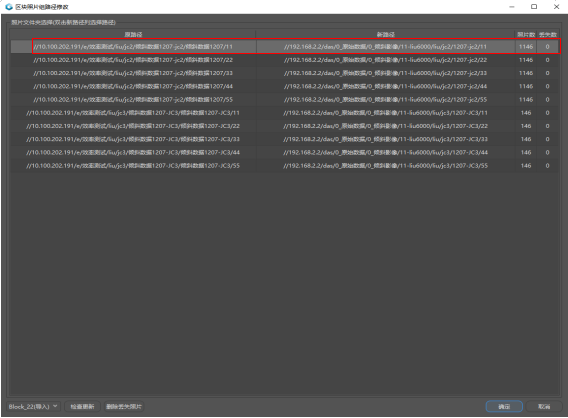
图 照片路径修改后
3.设置
见前篇GEngine中内容。
4.工具
工具模块,功能如图所示:
图 工具菜单
点击菜单栏中的工具,弹出如表菜单:
表 工具菜单
| 瓦片匀色 | 对选择的瓦片进行自动匀色 |
| 格式转换工具 | 将选择的瓦片转换为其他格式,如3Dtiles、.PLY、S3MB等 |
| 生成快拼DOM | 对已空三的区块生成快拼DOM |
| 航迹线检查合并 | 合并航迹线文件 |
| 合并DOM/DSM | 对已重建完模型的产品生成DOM/DSM |
| 模型原点规划 | 针对大场景空三,提供模型原点规划工具,并可联动重建大师输出多模型原点数据成果 |
4.1瓦片匀色
针对之前版本没有进行过瓦片匀色的三维模型,提供瓦片接边处匀色功能。选择需要匀色的产品及匀色后输出目录,选择需要匀色的瓦片,点击处理按钮程序就会对选择的瓦片进行自动匀色,如图所示:
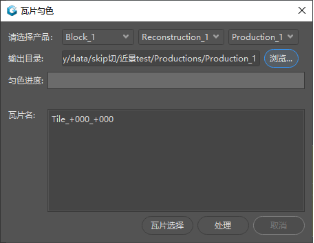
图 瓦片匀色界面
4.2格式转换工具
界面包含选择产品、输出格式选择已完成重建的产品,可以将.obj或.osgb格式的模型数据转换为FBX、DAE、PLY、3DS、S3MB、3Dtiles、3MX、LAS、I3S 等格式,选择输出路径,点击转换按钮即可开始转换:
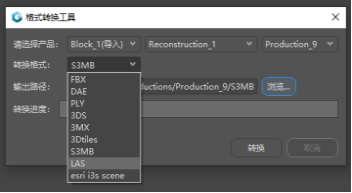
图 格式转换工具
4.3生成快拼DOM
已空三的区块可以直接输出快拼DOM。设置好输出的分辨率、输出名称、输出路径,点击等待处理完成即可,处理完成打开文件夹查看成果。
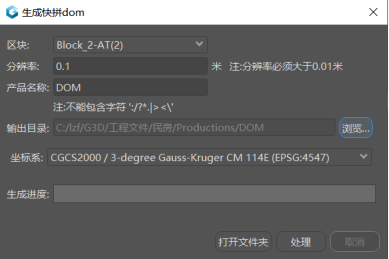
图 生成快拼DOM
例:照片1046张,影像分辨率2500万,地面分辨率2.5cm,面积0.8km²,空三快拼处理时间约20分钟。(参考配置i712700k + NVDIA3080)
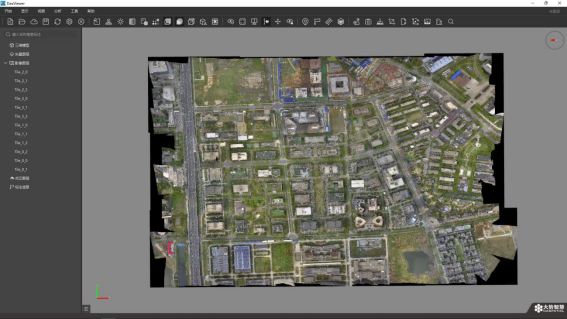
图 快拼DOM结果
4.4航迹线检查合并
重建大师具备多条航迹线合并的功能,支持的格式有.txt和_sebt.out。添加好航迹线后在数据预览中分别设置每条航迹线的时间、xyz属性,然后确定好输出目录点击确定生成合并结果。若航迹线存在时间冲突,点击是将航迹数据取并集后输出合并文件,并生成重叠说明文件;点击否则取消合并,并生成重叠说明文件。
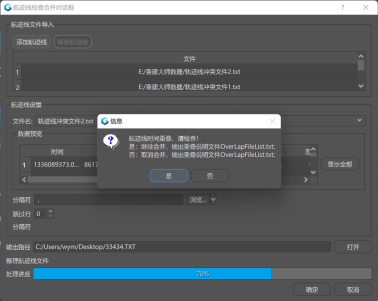
图 航迹线检查合并
4.5合并DOM/DSM
重建大师生成完分幅DOM/DSM后,可以选择对应的产品合并DOM/DSM。选择需要合并DOM/DSM的产品,选择DOM/DSM,设置输出路径,导入合并的范围,点击合并按钮开始处理。
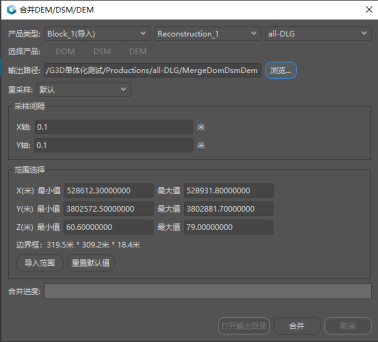
图 合并DOM/DSM界面
4.6模型原点规划
4.6.1使用场景
OSGB格式的三维模型,因有效位数限制,地面分辨率在厘米级的数据,重建时模型的位置与原点x或y方向超过10000米时,OSGB数据会存在小数点后有效位数丢失问题。模型显示时会出现闪面问题,因此需要每个10000米的网格定义一个模型原点,减少模型坐标值的大小。
三维模型的表达:
模型实际位置 = 模型坐标 + metadata.xml文件中的(x,y,z)
示例:
| 模型坐标 | 模型实际位置 |
 |  |
| metadata.xml | |
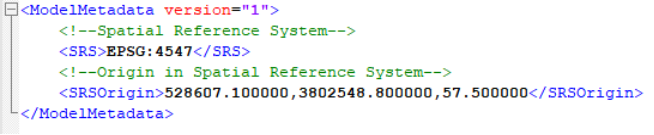 | |
模型实际位置 = 模型坐标 + metadata.xml文件中的(x,y,z)
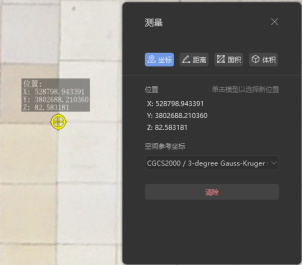
模型实际位置:(528798.943391,3802688.210360,82.583181)
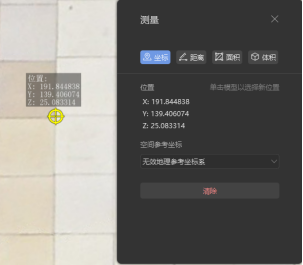
模型坐标:(191.844838,139.406074,25.083314)
Metadata.xml:(528607.1,3802548.8,57.5) SRS,坐标系为EPSG:4547
模型实际位置X:528798.943391=191.844838+528607.1
模型实际位置Y:3802688.210360=3802688.210360+139.406074
模型实际位置Z:82.583181=25.083314+57.5
4.6.2功能介绍
原有作业方式需先规划原点、分批提交原点对应的瓦片。
使用模型原点规划功能,根据项目的范围、按要求设计模型原点。导出多原点设计文件,联动重建软件按设计原点输出对应瓦片。
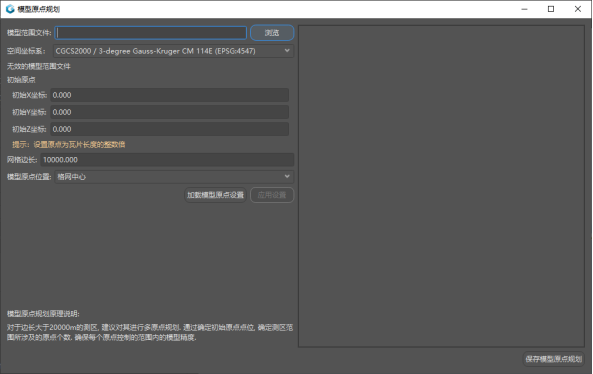
图 模型原点规划界面
表 功能说明表
| 功能 | 功能说明 |
| 模型范围文件 | 支持KML、SHP两种格式 |
| 空间坐标系 | 保持与模型成果坐标系一致 |
| 初始原点 | 初始X坐标、初始Y坐标自定义,数值保持为瓦片长度的整数倍 初始Z坐标根据海拔 |
| 网格边长 | 网格边长与实际模型地面分辨率(GSD:Ground Sampling Distance)相关。 GSD在(0.01m,0.1m]区间,单原点有效距离为0~10km; GSD在(0.1m,1m]区间,单原点有效距离为0~100km。 |
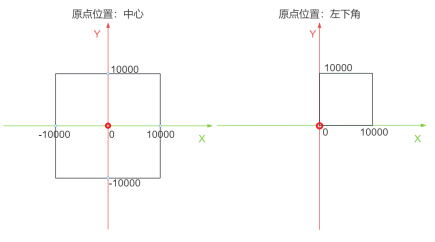
| 模型原点位置 |
例:以GSD为0.02m数据为例,单原点有效距离为0~10km,模型原点设置在网格中心,网格边长则设置为20000;模型原点设置在网格左下角,网格边长则设置为10000。 |
| 应用设置 | 应用设置参数,并预览划分效果 |
| 保存模型原点规划 | 保存模型原点规划文件 |
4.6.3操作说明
①输入范围线 KML/SHP
导入![]() 文件。
文件。
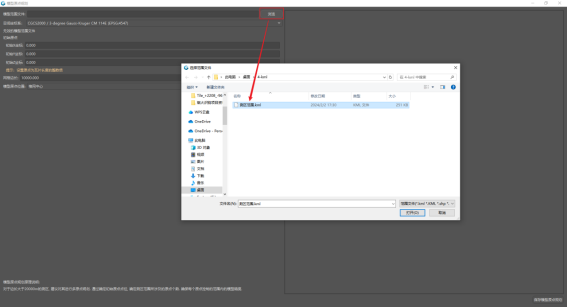
图 导入范围线
②参数设置
初始原点坐标设置。
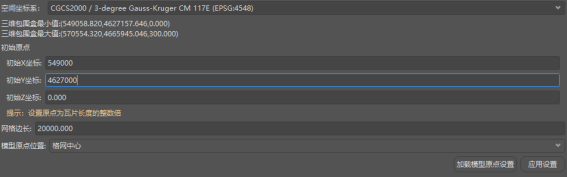
图 初始原点坐标设置
③效果预览
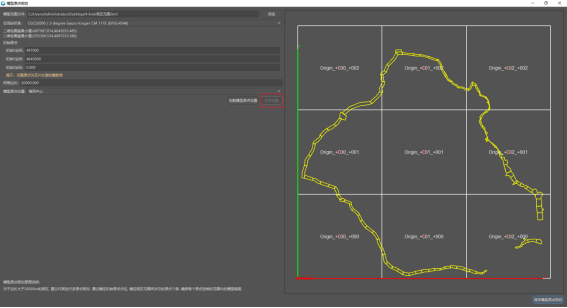
图 多原点划分效果预览
④保存原点规划文件
图 导出多原点文件
⑤提交产品界面导入参数
提交产品时,导入多原点规划文件,自动按原点将不同瓦片导出。
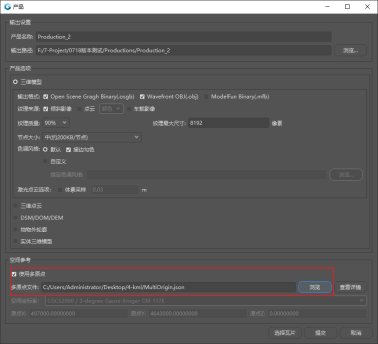
图 导入多原点
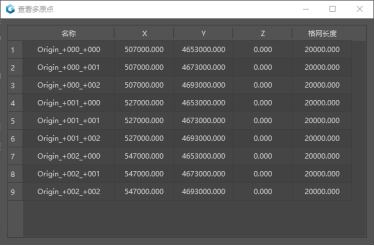
图 原点参数预览
5.帮助
5.1用户手册
用户手册即本文档,介绍软件及基本软件使用操作。
5.2更新操作说明
更新内容说明,介绍更新的内容。
5.3关于
版本号,发布日期等内容。
5.4日志目录
软件运行日志。
5.5Dump目录
软件崩溃Dump存储目录,若遇到正常使用过程中软件崩溃问题,在该目录下将Dump文件发送给技术支持以获取支持。