WK-F01和WK-F02以及WK-F01在电动三轮车和休闲三轮上的应用比较
此前测试过低速电动车BSD雷达,此次对WK-F02、F03和FO1进行实时测评对比,这三款雷达模块均由上海渭成智能科技有限公司提供,感谢赞助方无偿提供。此次测评的目的是为了满足市场需求,以实现各方案商出品的高性价比短距离车载盲区监测毫米波雷达传感器,采用不用的方案,最远检测距离可达 60 米,采用 FMCW 调制模式,天线两发两收,采用先进的MIMO 技术,具有较高的距离分辨率和角度分辨率,集成了盲区监测(BSD)/变道辅助(LCA)/后向碰撞预警(RCW)等功能,可以满足两轮车、三轮车、低速四轮车的辅助驾驶需求。

- WK-F01雷达模块,

二车轮BSD盲区监测-日间路测
主要参数:
工作电流 35 -98mA ,最大辐射功率16dBm,距离精度±0.5m,速度精度±0.5m/s,最大探测距离35米(机动车),同时输出1个目标信号。
- WK-FO2雷达模块,

两轮和三轮电动车BSD最新路测
主要参数:
工作电流 20mA ,最大辐射功率20dBm,距离精度±0.5m,速度精度±0.3m/s,最大探测距离40米(机动车、电动车、自行车),同时输出左、右两个探测区域目标信号,并实时点亮车尾闪爆灯。
3.WK-F03雷达模块,

三轮车实测BSD左后来车右后来车实时报警和闪爆灯实时亮
主要参数:
工作电流 20mA ,最大辐射功率20dBm,距离精度±0.3m,速度精度±0.2m/s,最大探测距离50米(机动车、电动车、自行车、行人),同时输出左、右两个探测区域目标信号,并实时点亮车尾闪爆灯。
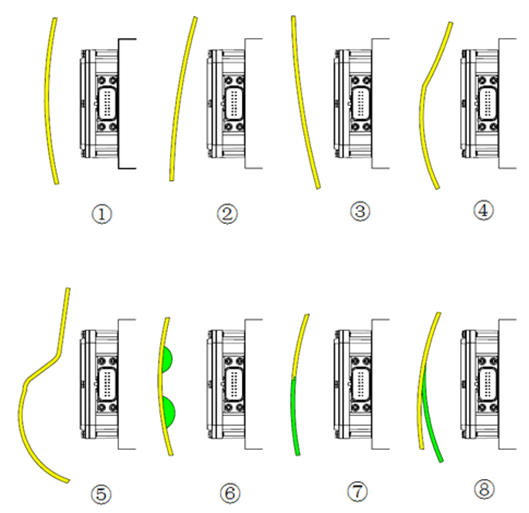
总结,无论WK-F01、WK-F02,还是WK-F03雷达模块,车辆应在设计之初为雷达安装固定留有固定螺孔或螺柱或支架,为了能够更为准确的发挥传感器性能,传感器在安装时必须注意水平的和垂直的角度。传感器安装完毕后,雷达法线和车身轴线在水平方向的夹角为0,角度偏差控制在±3°以内 。俯仰安装角要求,图中仰角γ应保证1°±1° 。
雷达传感器为毫米波雷达,其基本原理是利用电磁波反射来探测障碍物,因而保护罩材质不能为金属(金属油漆中金属含量不超过5%)或其它电磁波不能穿透的材料。