基于ESP32控制的机器人摄像头车
DIY Wi-Fi 控制的机器人摄像头车:从零开始的智能探索之旅
在当今科技飞速发展的时代,机器人技术已经逐渐走进了我们的生活。今天,我将带你一起探索如何制作一个 Wi-Fi 控制的机器人摄像头车,它不仅可以远程操控,还能通过摄像头实时传输画面。这个项目不仅有趣,而且成本低廉,非常适合电子爱好者和初学者尝试。
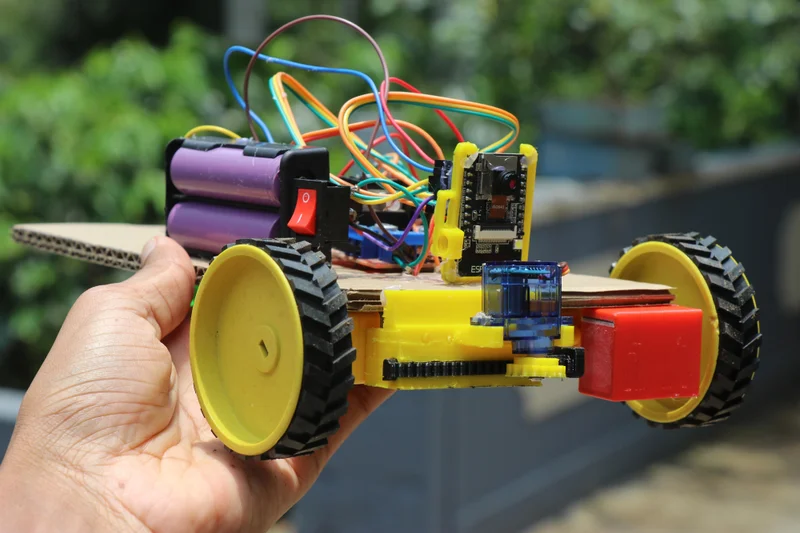
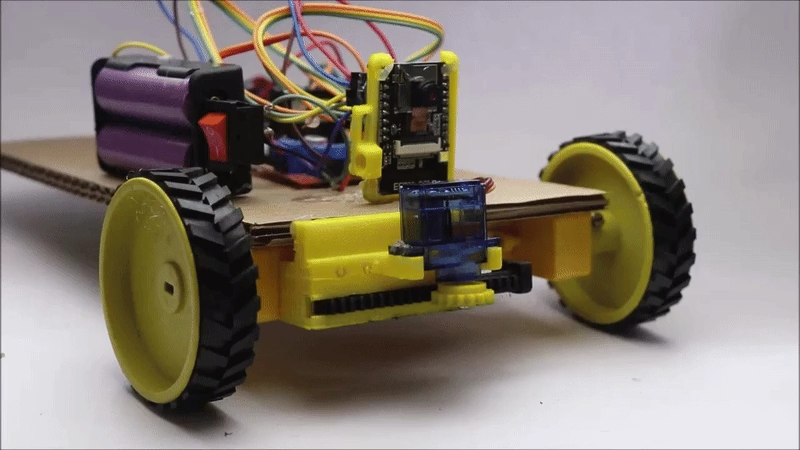
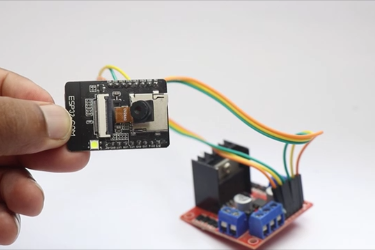
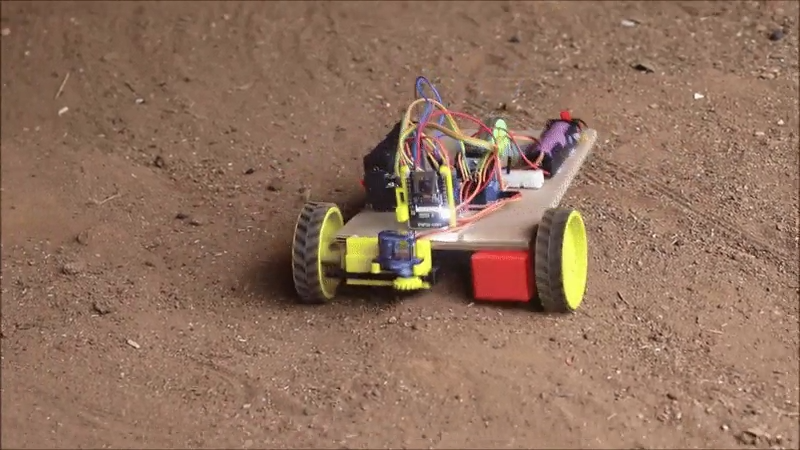
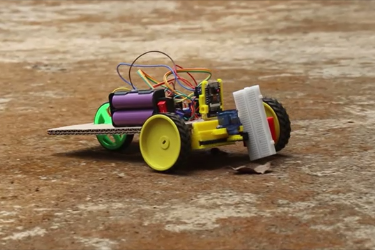
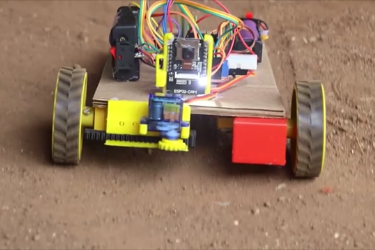
先上实物图:
一、项目背景
小时候,我总是对遥控车充满了好奇,但当时的遥控车价格昂贵,功能也相对有限。如今,随着可编程开发板的普及,制作一个功能强大的机器人车变得既经济又可行。这个项目的核心是 ESP32-CAM 模块,它是一款集成了 Wi-Fi 功能的摄像头模块,可以通过智能手机进行远程控制。通过这个项目,我们不仅可以学习到电子电路的搭建,还能掌握如何通过网络进行设备控制,同时也能发挥你的创造力,为机器人车添加更多有趣的功能。
二、项目所需材料
在开始制作之前,我们需要准备以下材料:
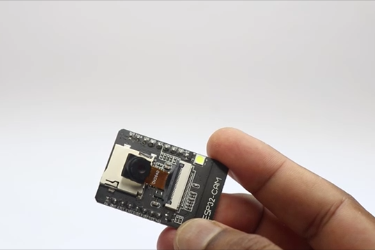
- ESP32-CAM 模块:这是整个项目的核心部件,负责处理摄像头数据和网络通信。
- FTDI 编程模块:用于将代码上传到 ESP32-CAM 模块。
- L298N 电机驱动模块:用于控制电机的正反转,从而驱动车轮。
- BO 电机和轮子:用于驱动机器人车的移动。
- 直流电机和轮子:用于后轮的驱动。
- 跳线:用于连接各个模块的电路。
- 面包板电源轨:方便进行电源连接。
- 热熔胶:用于固定各个部件。
- Arduino IDE:用于编写和上传代码。
- 平头螺丝刀:用于固定电线。
- 开关:用于控制电源的开关。
- 18650 电池:为机器人车提供电源。
三、电路搭建与代码上传
(一)电路搭建
-
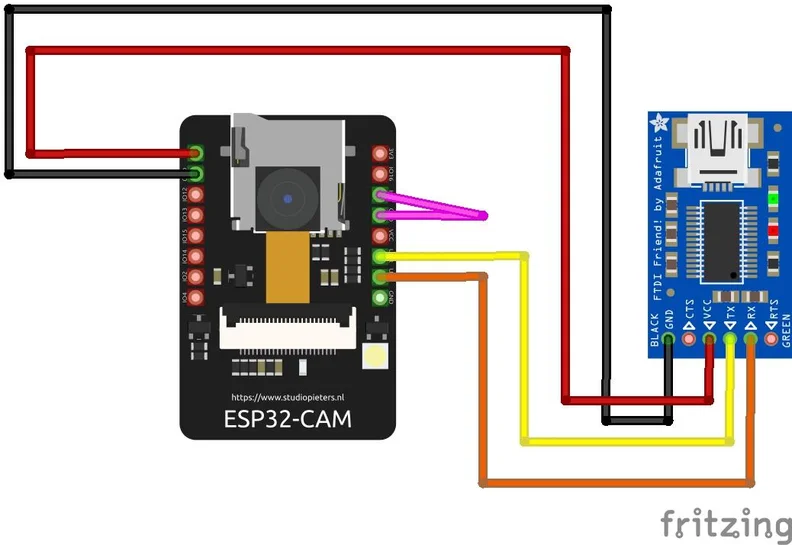
ESP32-CAM 编程电路:首先,我们需要通过 FTDI 模块将代码上传到 ESP32-CAM 模块。连接方式如下:
- FTDI 的 GND 连接到 ESP32-CAM 的 GND。
- FTDI 的 VCC 连接到 ESP32-CAM 的 5V。
- FTDI 的 RX 连接到 ESP32-CAM 的 TX。
- FTDI 的 TX 连接到 ESP32-CAM 的 RX。
- 用跳线在 ESP32-CAM 的 IO0 和 GND 之间建立一个环路,这一步是为了进入编程模式,上传完代码后可以移除。
-
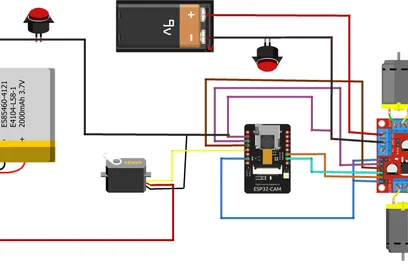
电机驱动电路:将 L298N 电机驱动模块与 ESP32-CAM 模块连接。连接方式如下:
- L298N 的 ENA 连接到 ESP32-CAM 的 I02。
- L298N 的 ENB 连接到 ESP32-CAM 的 I02。
- L298N 的 IN1、IN2、IN3 和 IN4 分别连接到 ESP32-CAM 的 I012、I013、U0T 和 U0R。
-
电源连接:将电池的正极连接到 L298N 的 12V 引脚,负极连接到 GND。然后将 L298N 的 5V 和 GND 引脚分别连接到 ESP32-CAM 的 Vin 和 GND 引脚。
-
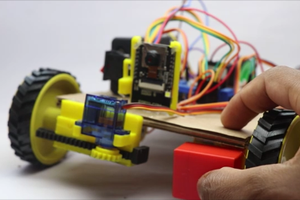
机械爪伺服电机连接:机械爪的伺服电机的 GND 连接到 ESP32-CAM 的公共 GND,正极连接到一个独立的 3.7V 电池源,并通过一个单独的开关进行控制。伺服电机的信号引脚连接到 ESP32-CAM 的 I015 引脚。
(二)代码上传
- 打开 Arduino IDE,复制并粘贴提供的代码。
- 在 IDE 中打开板管理器,选择 AI Thinker 模块,并选择正确的端口号。
- 点击上传按钮,将代码上传到 ESP32-CAM 模块。
- 上传完成后,测试电路。打开手机的 Wi-Fi 设置,连接到 ESP32-CAM 创建的 Wi-Fi 网络。
- 查看连接设备,找到 ESP32-CAM 的 IP 地址,并在浏览器中输入该地址。
- 如果一切正常,你应该能够看到 ESP32-CAM 的摄像头画面,并且可以控制摄像头的闪光灯。

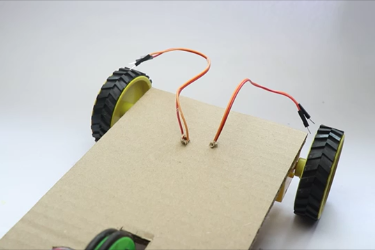
四、底盘制作
为了使机器人车能够稳定移动,我们需要制作一个合适的底盘。在这个项目中,作者选择使用硬纸板来制作底盘。虽然使用 MDF 木板会更加坚固,但如果没有合适的工具来切割和定制木板,硬纸板也是一个不错的选择。底盘设计为三轮结构,而不是四轮,这样可以减少电机的数量,从而降低电源需求和材料成本。后轮由一个直流电机驱动,通过一个轴连接到底盘的中间部分。为了平衡电机的重量,将电池放置在底盘的另一侧,并用热熔胶固定。

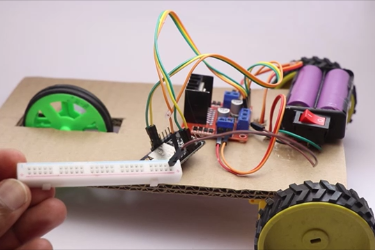
五、组件安装
- 在底盘中心放置一块双面胶带,将电机驱动器安装在上面。
- 使用螺丝刀将电机的电线固定到驱动器的插槽中。
- 整理所有的跳线,并进行必要的调整。
- 使用 3D 打印的框架将 ESP32-CAM 模块安装在底盘的前端。如果没有 3D 打印设备,也可以使用热熔胶直接将摄像头模块固定在底盘上。
- 使用面包板的电源轨来简化所有组件之间的 GND 连接,并将其安装在底盘上。
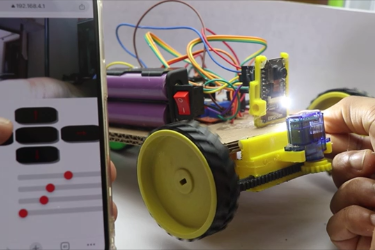
七、机器人车的使用
- 首先打开机械爪电路,然后打开主电路。
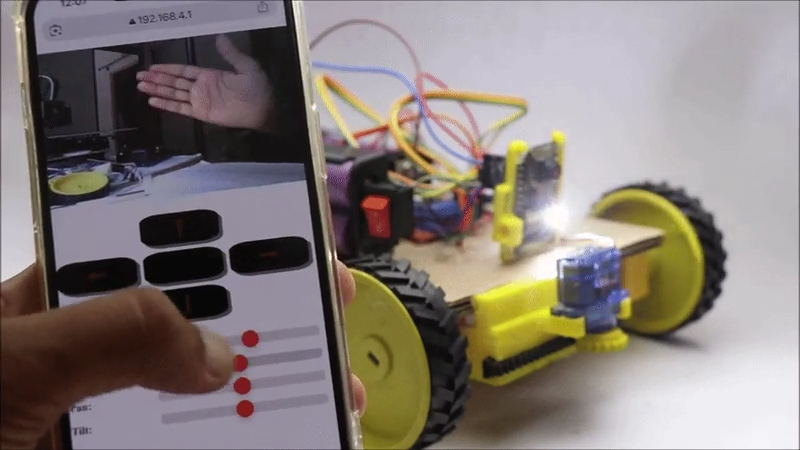
- 在手机的 Wi-Fi 设置中连接到机器人车创建的 Wi-Fi 网络。
- 打开浏览器,输入 IP 地址并刷新页面。
- 摄像头将很快激活,你可以在设备上看到实时视频流。
- 尝试通过屏幕上的滑块控制机器人车的前后左右移动。
- 机械爪也应该能够根据屏幕上的滑块动作进行抓取和释放。
八、项目拓展与优化
虽然这个项目已经非常有趣,但你可以通过以下方式进一步拓展和优化它:
- 增加传感器:添加超声波传感器或红外传感器,使机器人车能够避开障碍物。
- 改进底盘:使用更坚固的材料制作底盘,如 MDF 木板或金属板。
- 增加语音控制功能:通过语音识别模块,使机器人车能够通过语音指令进行操作。
- 优化代码:对代码进行优化,提高控制的响应速度和稳定性。
- 增加自主导航功能:通过添加 GPS 模块和地图数据,使机器人车能够自主导航到指定位置。
九、项目总结
通过这个项目,我们不仅学习到了如何搭建电子电路和编写代码,还掌握了如何通过 Wi-Fi 进行设备控制。这个机器人车不仅可以用于娱乐,还可以作为一个实用的监控设备。你可以根据自己的需求和创意,对它进行进一步的优化和拓展。希望这个项目能够激发你的创造力,让你在电子制作的道路上越走越远。感谢你的阅读,希望你能喜欢这个项目!
希望你喜欢这个项目,并在构建过程中找到乐趣!如果你有任何问题或需要帮助,欢迎在评论区交流。
作者:Svan.
注意:本博文为不得在未经本人同意进行转载或者二次创作,违者必究!!!