PIC18F45K80 ECAN模块使用
PIC18F45K80的CAN使用过程遇到一些问题,记录一下,主要是代码的理解。
在MPLAB X中配置工程:
1,在MCC中添加ECAN外设
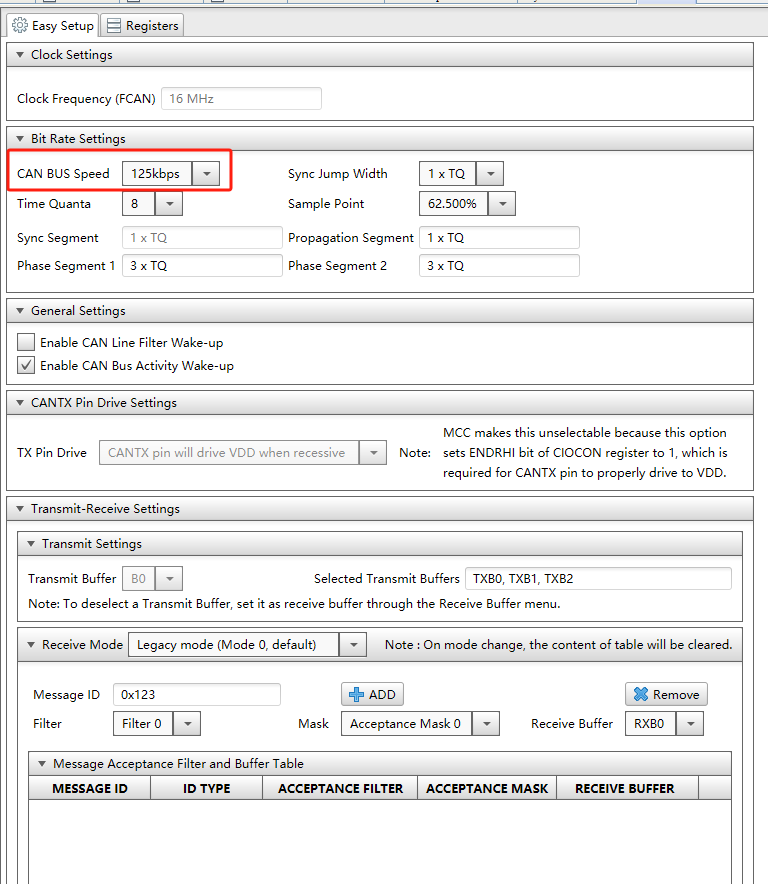
2,CAN通讯有波特率的概念,整一个CAN网络需要运行在同一个速率。这里我们把他配置到125kbps。其余可以保持默认。
3,添加了一个串口USART2作为打印输出,方便调试。点击MCC的生成按钮生成代码,我们直接对代码进行分析。
CAN基本概念:
CAN发送的帧分为标准帧和拓展帧,简单说区别就是拓展帧长一点。所以代码上需要做不同处理。简单描述一下。
CAN标准帧格式
CAN 标准帧信息为11个字节(3 + 8),包括两部分:信息和数据部分。前3个字节为信息部分。
字节1为帧信息。第7位(FF)表示帧格式,在标准帧中,FF=0;第6位(RTR)表示帧的类型,RTR=0表示为数据帧,RTR=1表示为远程帧;DLC表示在数据帧时实际的数据长度。
字节2、3为报文识别码,11位有效。
字节4~11为数据帧的实际数据,远程帧时无效。
CAN扩展帧格式
CAN 扩展帧信息为13个字节(5 + 8),包括两部分,信息和数据部分。前5个字节为信息部分
字节1为帧信息。第7位(FF)表示帧格式,在扩展帧中,FF=1;第6位(RTR)表示帧的类型,RTR=0表示为数据帧,RTR=1表示为远程帧;DLC 表示在数据帧时实际的数据长度。
字节2~5为报文识别码,其高29位有效。
字节6~13数据帧的实际数据,远程帧时无效
代码实现
CAN的数据实际收发和串口很相似,可以是轮询接收,直接发送。也可以是中断实现。
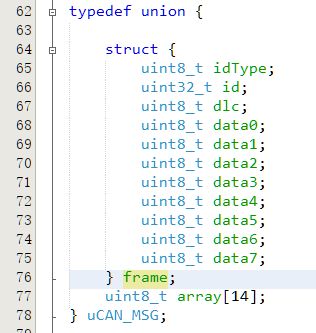
CAN相关的定义:
因为CAN有自己的帧格式,所以直接定义好了数组和联合体,用来方便填入数据。
在ecan.h文件中:
------------------------------发送------------------------------:
数据的填充如下图,重点:
1、idType需要区分标准帧还是拓展帧;
2、拓展帧因为存在EID,所以需要将SID进行移位,左移18这个操作是固定的。标准帧不需要额外移位 ,直接将SID填充到id中;
3、dlc是长度,根据实际填写就好;
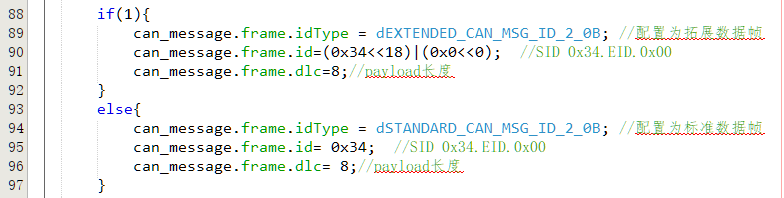
做演示,这里没有填充数据
帧填充完毕,直接调用CAN_transmit() 发送就可以

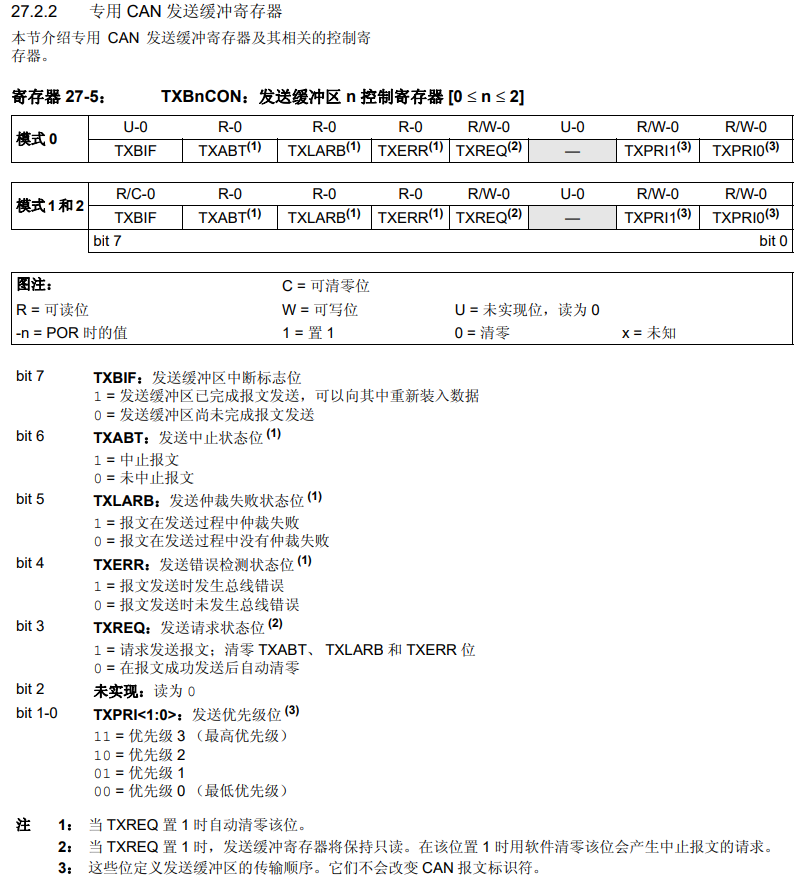
状态寄存器如下图,通过查询bit7,来得知发送完成状态,这个和串口的发送很相似:
可以通过在主循环中监控CAN错误标志:
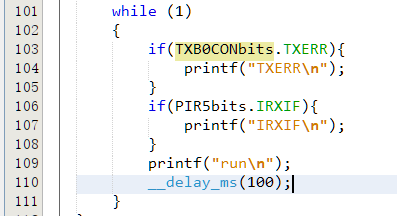
其中CAN通讯存在应答,如果总线上面没有能够接收节点,这一帧就无法发送成功,CAN外设会一直尝试重新发送。
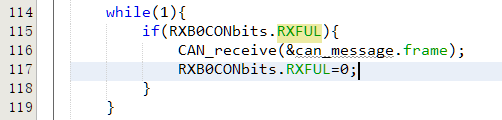
------------------------------接收------------------------------
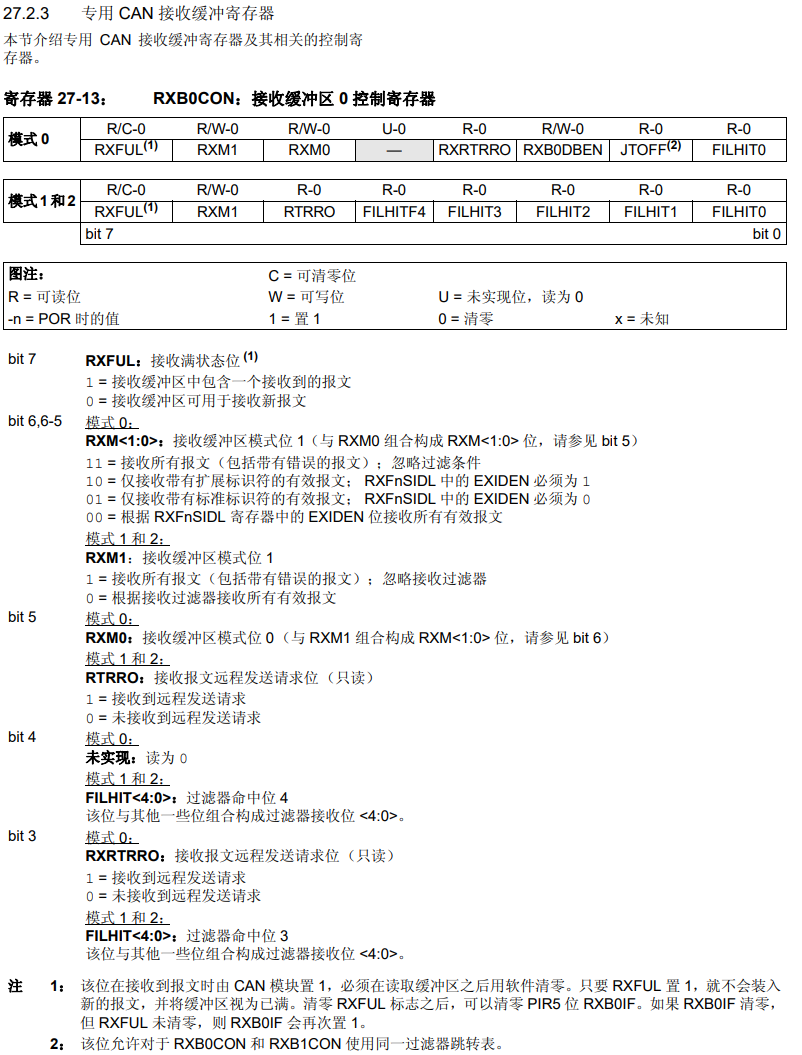
查询RXBxCON寄存器的bit7,如果为一,直接去调用CAN_receive()获取数据,数据读取完毕之后,清除RXFUL标志。
同样的,自己去解析数据帧就可以了,先判断是标准帧还是拓展帧。
这样就可以实现最基本的数据收发了,当然CAN还有很多的功能,比如过滤、错误产生等等,这个可以大家自己研究了。