动态规划-62.不同路径-力扣(LeetCode)
一、题目解析
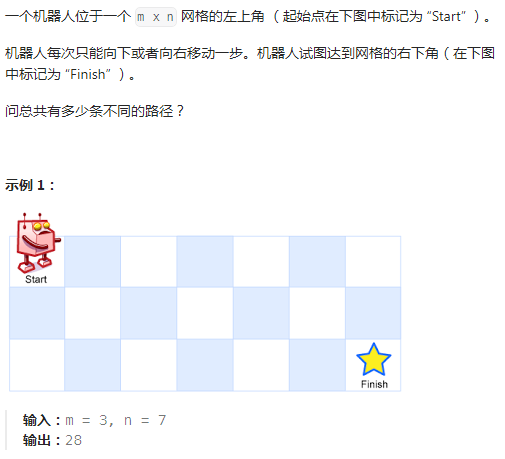
机器人只能向下或向左,要从Start位置到Finish位置。
二、算法原理
1.状态表示
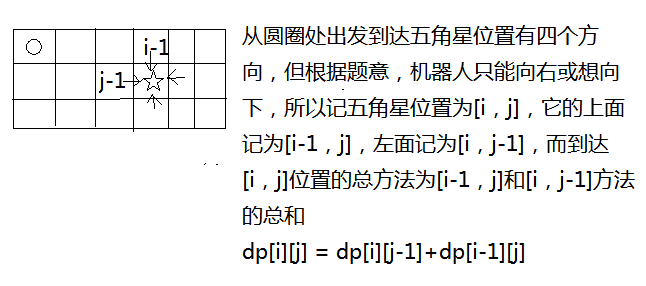
我们要求到Finish位置一共有多少种方法,记Finish为[i,j],此时dp[i,j]表示:到[i,j]位置时,一共有多少种方法,满足我们的需求。
2.状态转移方程
根据最近一步划分问题
3.初始化
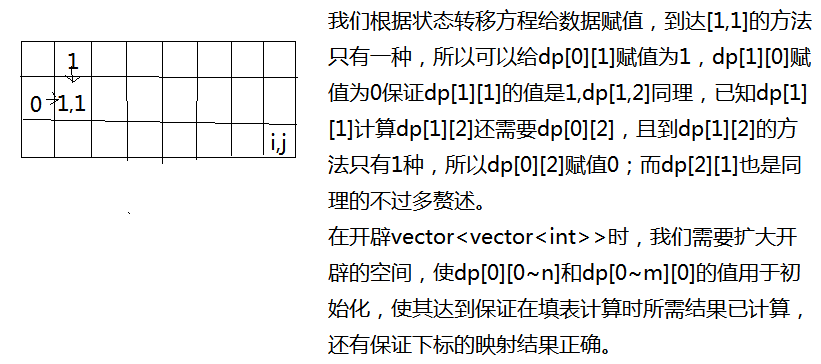
开辟二维数组时,需要开辟(m+1)*(n+1)大小的空间,dp[0][0~n]和dp[0~m][0]用于初始化,其余dp[1][1]~dp[m][n]用于记录到达该位置的总方法数。
4.填表顺序
每行从左往右填写,每一列从上往下填写
5.返回值
由于Finish位置是[i][j],所以结果返回dp[m][n]
可以先根据上面原理去尝试编写代码,链接:62. 不同路径 - 力扣(LeetCode)
三、代码示例
class Solution {
public:int uniquePaths(int m, int n) {vector<vector<int>> dp(m+1,vector<int>(n+1));dp[0][1] = 1;for(int i = 0;i<=m;i++) dp[i][0] = 0;for(int j = 2;j<=n;j++) dp[0][j] = 0;for(int i = 1;i<=m;i++){for(int j =1;j<=n;j++){dp[i][j] = dp[i][j-1]+dp[i-1][j];}}return dp[m][n];}
};
看到最后,如果对您有所帮助还请点赞和收藏,我们下期再见!