baobab查看磁盘空间占用
空间不够用了,急死我了,搞不好要格式化增加空间,重装系统!
yay的edge缓存占了8GB多!
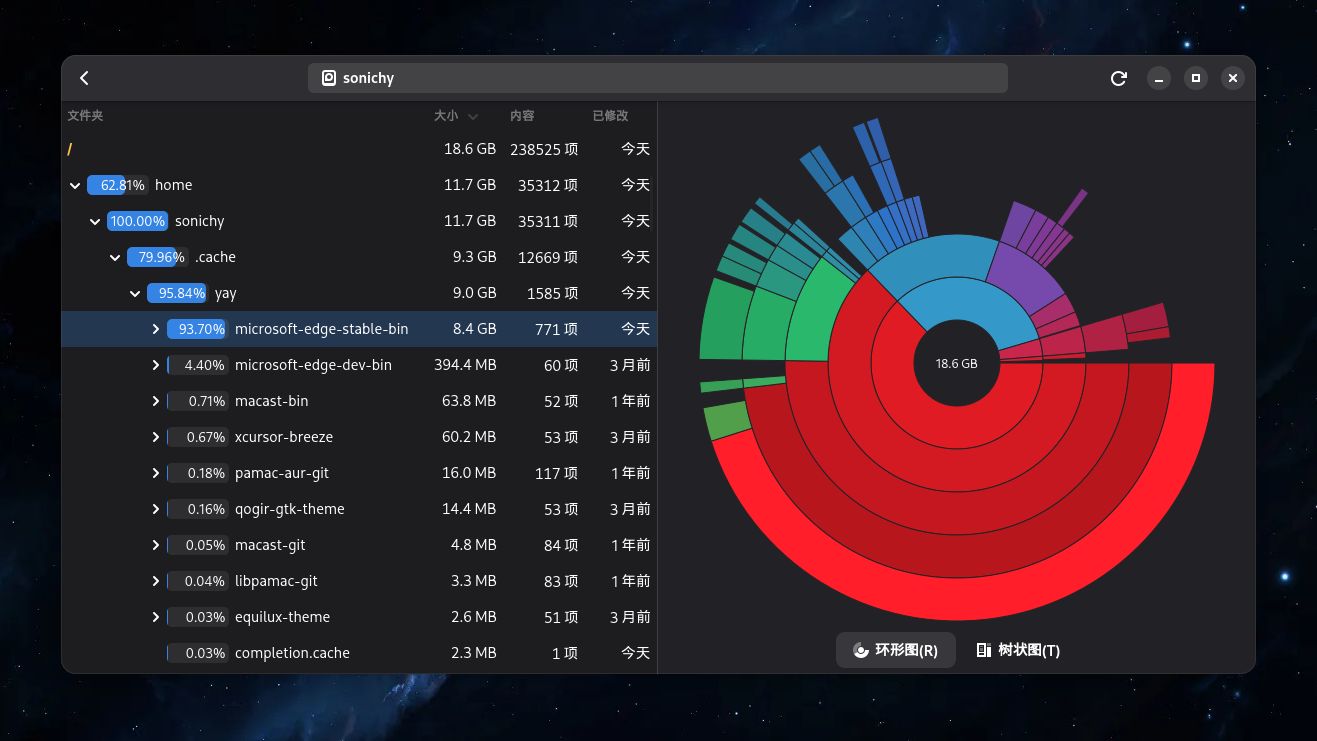
我记得以前有个像SpaceSniffer的Linux软件,基于Qt的,找不到了!
GNOME窗口截图都有很厚的边距!LXQt的screengrab窗口截图,勾选无窗口装饰可以去掉!
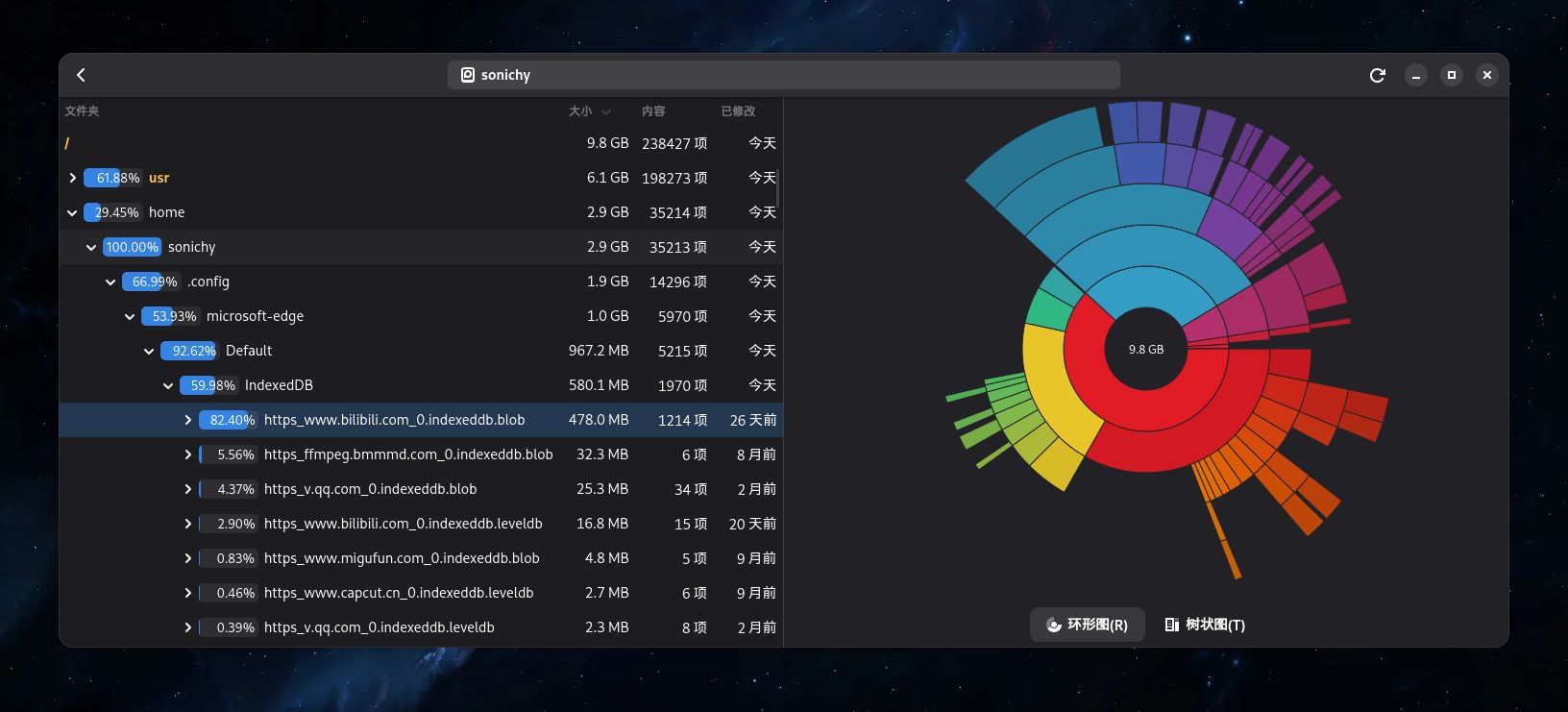
bilibili的IndexedDB还有400MB多
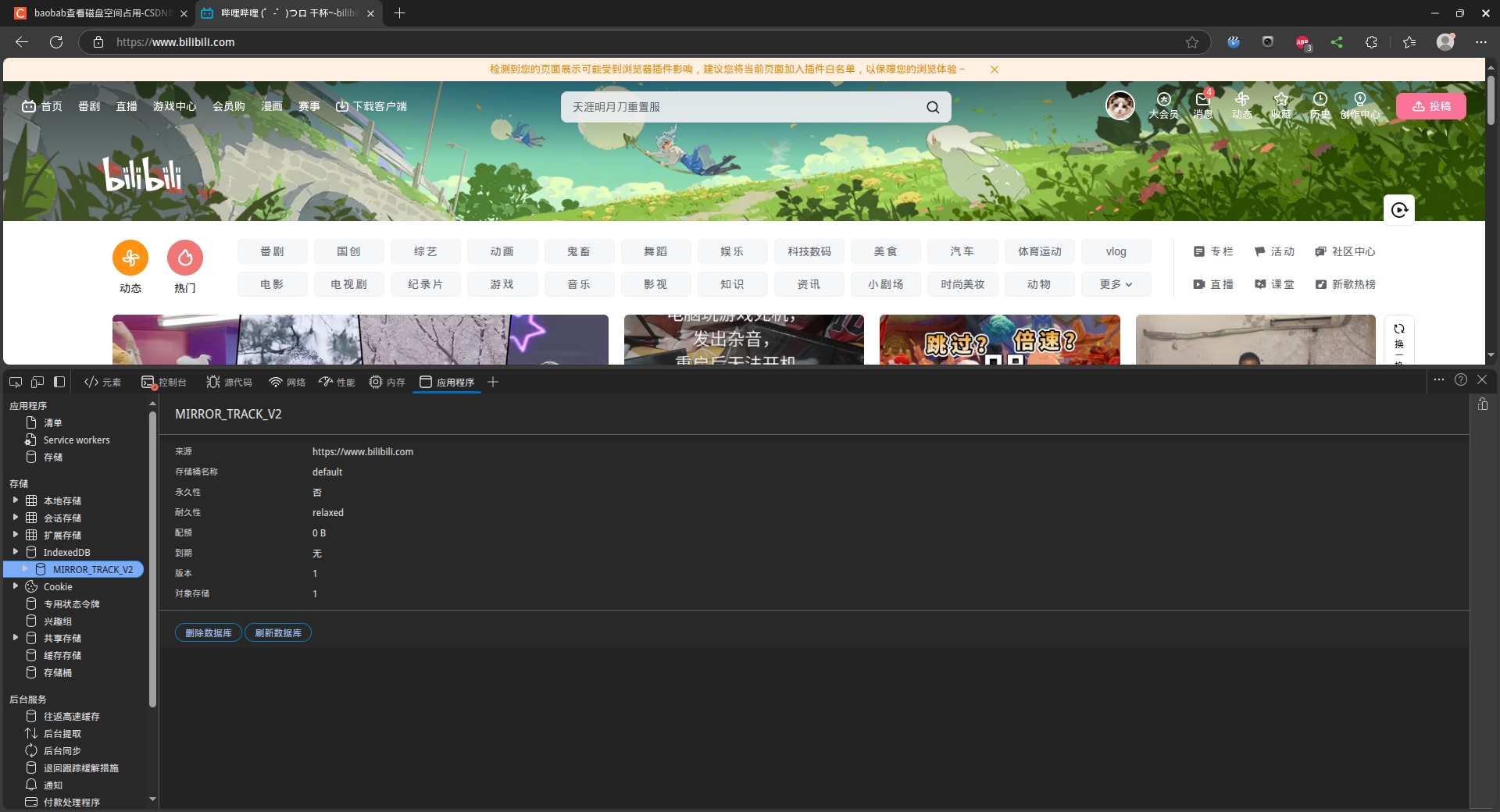
IndexedDB删除数据库
空间不够用了,急死我了,搞不好要格式化增加空间,重装系统!
我记得以前有个像SpaceSniffer的Linux软件,基于Qt的,找不到了!
GNOME窗口截图都有很厚的边距!LXQt的screengrab窗口截图,勾选无窗口装饰可以去掉!