ultralytics框架进行RT-DETR目标检测训练
自DETR提出以来,其采用匈牙利匹配方式真正的实现了端到端检测效果,避免了NMS等后处理过程,同时,相较CNN的局部特征提取,其凭借着Transformer强大的全局特征提取能力,在目标检测领域可谓大杀四方,基于Transformer的目标检测方法因此层出不穷。
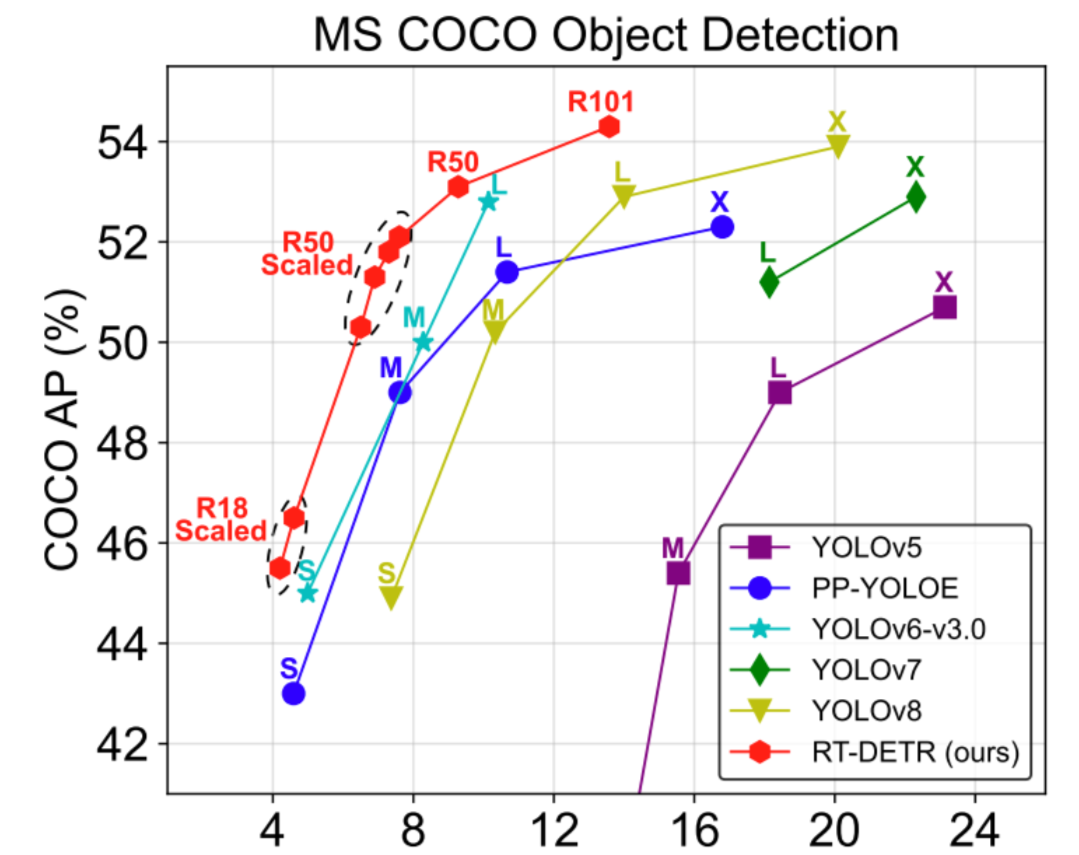
然后,尽管DETR类目标检测方法具有较好的数据拟合能力,但Transformer本身的计算复杂度较高,这使其很难完成实时检测任务,而今天我们则要介绍的便是百度提出的实时DETR目标检测方法,这个方法我已经在先前的博客中有过介绍,当时是基于RT-DETR的源码进行介绍的,今天我们则要介绍的是ultralytics中的RT-DETR模型。
模型结构
RT-DETR模型结构如下:
from n params module arguments 0 -1 1 9536 ultralytics.nn.modules.block.ResNetLayer [3, 64, 1, True, 1] 1 -1 1 215808 ultralytics.nn.modules.block.ResNetLayer [64, 64, 1, False, 3] 2 -1 1 1219584 ultralytics.nn.modules.block.ResNetLayer [256, 128, 2, False, 4] 3 -1 1 7098368 ultralytics.nn.modules.block.ResNetLayer [512, 256, 2, False, 6] 4 -1 1 14964736 ultralytics.nn.modules.block.ResNetLayer [1024, 512, 2, False, 3] 5 -1 1 524800 ultralytics.nn.modules.conv.Conv [2048, 256, 1, 1, None, 1, 1, False]6 -1 1 789760 ultralytics.nn.modules.transformer.AIFI [256, 1024, 8] 7 -1 1 66048 ultralytics.nn.modules.conv.Conv [256, 256, 1, 1] 8 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest'] 9 3 1 262656 ultralytics.nn.modules.conv.Conv [1024, 256, 1, 1, None, 1, 1, False]10 [-2, -1] 1 0 ultralytics.nn.modules.conv.Concat [1] 11 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3] 12 -1 1 66048 ultralytics.nn.modules.conv.Conv [256, 256, 1, 1] 13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest'] 14 2 1 131584 ultralytics.nn.modules.conv.Conv [512, 256, 1, 1, None, 1, 1, False]15 [-2, -1] 1 0 ultralytics.nn.modules.conv.Concat [1] 16 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3] 17 -1 1 590336 ultralytics.nn.modules.conv.Conv [256, 256, 3, 2] 18 [-1, 12] 1 0 ultralytics.nn.modules.conv.Concat [1] 19 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3] 20 -1 1 590336 ultralytics.nn.modules.conv.Conv [256, 256, 3, 2] 21 [-1, 7] 1 0 ultralytics.nn.modules.conv.Concat [1] 22 -1 3 2232320 ultralytics.nn.modules.block.RepC3 [512, 256, 3] 23 [16, 19, 22] 1 7310072 ultralytics.nn.modules.head.RTDETRDecoder [4, [256, 256, 256]]
rtdetr-resnet50 summary: 402 layers, 42,768,952 parameters, 42,768,952 gradients
训练代码
这里我们使用ResNet50作为我们的特征提取网络,从论文的结果来看,RT-DETR只需要24个epoch便能达到一个较好的效果。
from ultralytics import RTDETR
# 加载预训练模型
model = RTDETR("rtdetr-resnet50.yaml")
# 开始训练
results = model.train(data="others.yaml",epochs=24,batch=6, # 根据GPU显存调整(T4建议batch=8)imgsz=640,device="0", # 指定GPU IDoptimizer="AdamW",lr0=1e-4,warmup_epochs=4,label_smoothing=0.1,amp=True
)
相较于YOLO系列的目标检测方法,其训练速度要慢很多,其需要一个epoch需要的时间大概是6分钟,不过从结果来看,其只需要20 epoch便能达到一个较好的效果。
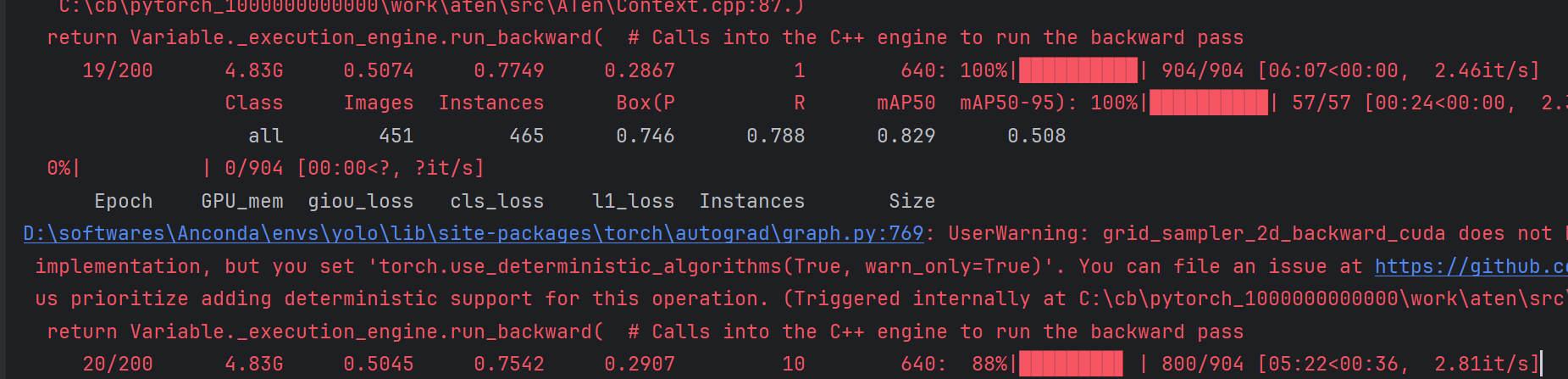
从模型文件大小来看,RT-DETR的文件大小约为245MB,而YOLO模型的大小多在10到20MB。

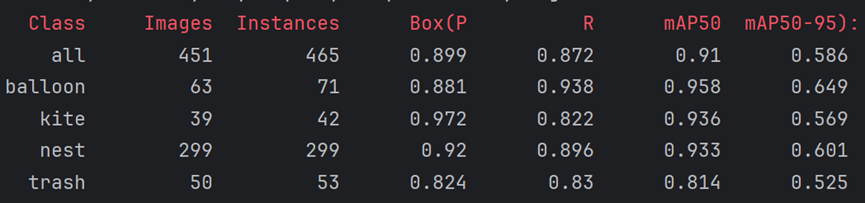
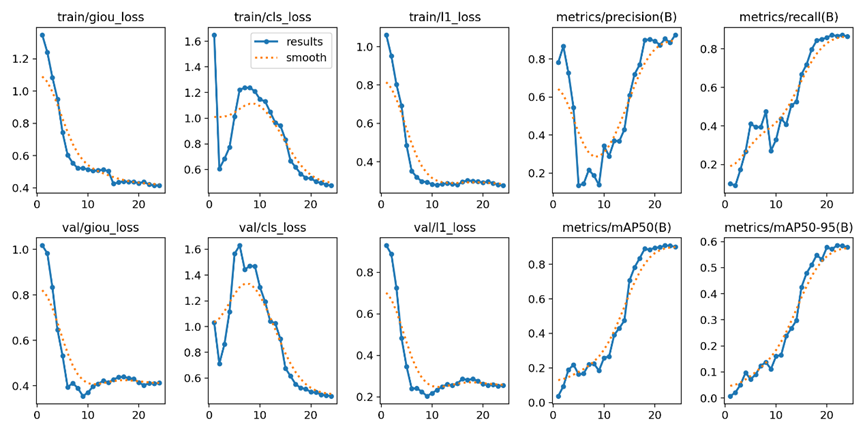
最终结果如下: