单应性估计
单应性估计是计算机视觉中的核心技术,主要用于描述同一平面在不同视角下的投影变换关系。以下从定义、数学原理、估计方法及应用场景等方面进行综合解析:
一、单应性的定义与核心特性
单应性(Homography)是射影几何中的概念,指从一个平面到另一个平面的可逆投影变换,能够保持共线性和交比不变。其核心特性包括:
- 共线性保持:直线经变换后仍为直线。
- 自由度:单应性矩阵为3×3矩阵,具有8个自由度(因尺度不变性)。
- 变换类型:涵盖刚体变换(旋转+平移)、仿射变换(保持平行性)和投影变换(任意四边形变换)。
二、数学原理与单应性矩阵的构造
在计算机视觉中,单应性矩阵(H)的数学形式可表示为:
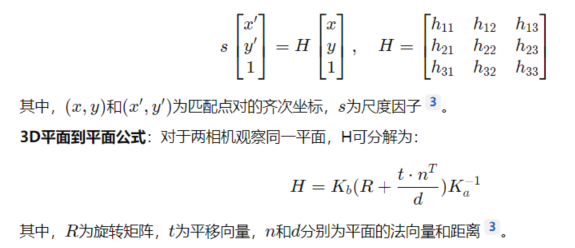
三、单应性估计方法
基于匹配点集的单应性矩阵估计步骤如下:
- 特征点匹配:通过SIFT、ORB等算法提取图像中的特征点并建立对应关系。
- 构建线性方程组:每对匹配点提供两个方程,最小需4对点求解H的8个参数。

- 求解方法:
- 直接线性变换(DLT):通过最小二乘法解超定方程组。
- 鲁棒估计(如RANSAC):剔除异常点以提高抗噪能力。
四、应用场景
- 图像拼接与全景生成:通过多图间的单应性变换对齐平面区域,消除视差。
- 增强现实(AR):将虚拟物体投影到真实场景中,保持透视一致性。
- 相机位姿估计:从单应性矩阵分解出相机的旋转矩阵R R R和平移向量t t t,用于SLAM系统。
- 图像校正:将倾斜拍摄的平面(如文档、车牌)矫正为正视图。
五、挑战与扩展
- 噪声敏感度:误匹配点会导致估计偏差,需结合RANSAC等鲁棒方法。
- 场景限制:仅在共面或纯旋转相机运动时严格成立,非平面场景需结合其他模型(如基础矩阵)。
- 深度学习扩展:近年出现基于CNN的单应性估计方法(如HomographyNet),可直接从图像回归矩阵参数。
引用来源
关于CNN(此处指卷积神经网络,而非美国有线电视新闻网)在单应性估计中的优势,结合计算机视觉领域的研究进展,可以总结为以下几点核心特性:
一、对复杂几何变形的鲁棒性
CNN通过多层卷积和非线性激活函数,能够自动学习图像中的局部和全局特征,对非线性投影变换(如大视角变化、遮挡等)的适应性显著优于传统基于特征点匹配的算法。例如:
- 大变形处理:传统方法(如DLT或RANSAC)在特征点分布不均或存在剧烈透视变形时容易失效,而CNN可端到端学习从图像到单应性矩阵的映射关系,减少对人工设计特征的依赖。
- 遮挡鲁棒性:通过数据增强和对抗训练,CNN能更好地处理遮挡场景下的单应性估计。
二、端到端的高效计算
传统单应性估计需依赖多步骤流程(特征提取→匹配→矩阵求解),而CNN可直接从输入图像回归单应性参数,简化流程并提升速度:
- 实时性:基于轻量级CNN架构(如MobileNet或EfficientNet改进模型),可在移动设备上实现实时单应性估计,适用于AR/VR等场景。
- 计算资源优化:无需迭代求解线性方程组,降低了对硬件算力的需求。
三、数据驱动的泛化能力
CNN通过大规模数据训练,能够捕捉更广泛的场景模式:
- 跨场景适应:传统方法对特定平面或纹理敏感,而CNN可泛化到不同光照、纹理缺失(如白墙、纯色平面)的场景。
- 多任务扩展:结合其他任务(如深度估计或语义分割)联合训练,可提升单应性估计的精度和场景理解能力。
四、与传统方法的互补性
CNN可与传统几何方法结合形成混合方案:
- 初始化增强:用CNN估计初始单应性矩阵,再通过RANSAC优化,减少迭代次数。
- 异常值抑制:通过CNN预测匹配点的置信度权重,辅助传统算法剔除误匹配点。
应用场景对比
| 方法 | 优势场景 | 局限性 |
|---|---|---|
| 传统方法(如DLT) | 小变形、高纹理场景,理论可解释性强 | 依赖特征点质量,大变形易失效 |
| CNN | 大变形、遮挡场景,实时性要求高 | 需大量训练数据,可解释性弱 |
挑战与未来方向
- 小样本学习:如何通过迁移学习或元学习提升小数据下的模型泛化性。
- 动态场景扩展:将单应性估计与光流、动态物体分割结合,处理非平面场景。
(注:由于用户提供的搜索结果未直接涉及CNN与单应性估计的关联,以上分析基于计算机视觉领域通用研究框架。)