tinyrenderer笔记(Shadow Mapping)
- tinyrenderer
- 个人代码仓库:tinyrenderer个人练习代码
前言
阴影是光线被阻挡的结果;当光源的光线由于其他物体的阻挡而无法到达物体表面时,该物体就会产生阴影。阴影能使场景看起来更真实,并让观察者获得物体之间的空间位置关系。场景和物体的深度感因此能得到极大提升。下图展示了有阴影和没有阴影的情况下的不同:
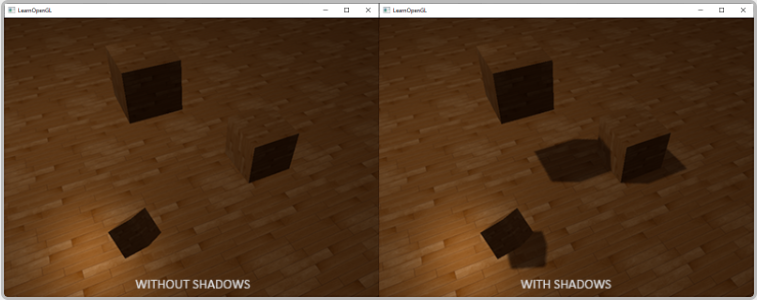
可以看到,有阴影时,你能更容易地区分物体之间的位置关系。例如,使用阴影时,浮在地板上的立方体的真实感更加清晰。
本节我们会手动实现一种硬阴影算法——Shadow Mapping。
Shadow Mapping
Shadow Mapping 背后的思路非常简单:我们以光源的位置为视角进行渲染,能被光源看到的东西都将被照亮,看不见的则处于阴影之中。假设有一个地板,光源和地板之间有一个大盒子。由于从光源处向光线方向看去,可以看到这个盒子,但看不到地板的一部分,这部分就应该在阴影之中。
下图中的所有蓝线代表光源可以看到的片段。黑线代表被遮挡的片段:它们应该渲染为带阴影的。如果我们绘制一条从光源出发,到达最右边盒子上的一个片段上的线段或射线,那么射线将先击中悬浮的盒子,随后才会到达最右侧的盒子。结果就是悬浮的盒子被照亮,而最右侧的盒子将处于阴影之中。
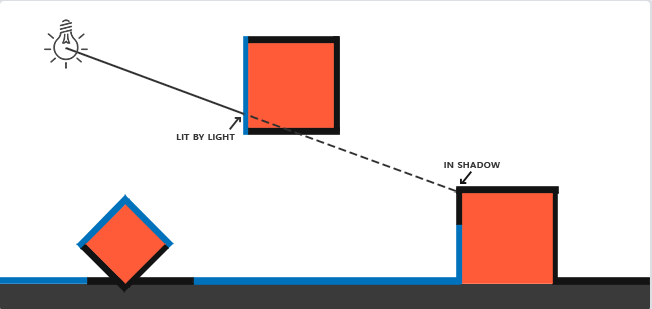
我们希望得到射线击中物体的第一个点,然后用这个最近点和射线上其他点进行对比。然后我们会做一个测试,判断测试点是否比射线上对应的最近点距离更远,如果是的话,这个点就在阴影中。
那么如何获得这个最近点呢?我们先将摄像机放在光源的位置,然后对整个场景进行渲染,进行深度测试但不着色,待渲染结束之后将此时 zbuffer 的数据写入纹理中,这个纹理就被称为 Shadow Map 或 Depth Map。
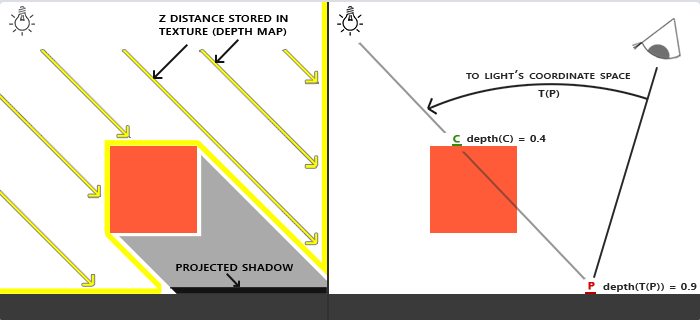
左图展示了一个定向光源(所有光线都是平行的)在立方体下方表面投射的阴影。通过存储在 Depth Map 中的深度值,我们可以找到最近点,并用它来决定片段是否在阴影中。我们可以使用来自光源的视图和投影矩阵来渲染场景,从而创建一个 Depth Map。这个投影和视图矩阵结合在一起形成一个 T 变换,它可以将任何三维位置转换到光源的可见坐标空间。
在右图中,我们展示了相同的平行光和观察者。我们渲染一个 P ‾ \overline{P} P 点处的片段,需要确定它是否在阴影中。我们首先使用 T 将 P ‾ \overline{P} P 变换到光源的坐标空间中。由于点 P ‾ \overline{P} P 是从光的透视图中看到的,它的 z 坐标对应于它的深度,在此例中,该值为 0.9。使用点 P ‾ \overline{P} P 在光源坐标空间中的坐标,我们可以索引 Depth Map,以获得从光视角看到的最近可见深度,结果是点 C ‾ \overline{C} C,最近深度为 0.4。由于索引 Depth Map 的结果小于点 P ‾ \overline{P} P 的深度,我们可以断定 P ‾ \overline{P} P 被遮挡,它在阴影中。
总结下来,Shadow Mapping 由两个步骤组成:
- 首先,我们渲染 Depth Map ;
- 然后,我们像往常一样渲染场景,并使用生成的 Depth Map 来计算片段是否在阴影中。
准备工作
为了更好地测试阴影的效果,设定一些参数如下:
Vec3f light_dir = Vec3f(-1, 0, 0);// 光线方向
Vec3f light_color = Vec3f(1, 1, 1);// 光线的颜色
Vec3f cameraPos = Vec3f(0, 0, 2);
Vec3f targetPos = Vec3f(0, 0, 0);
head 的模型矩阵如下:
glm::mat4 modelMatrix;
modelMatrix = glm::rotate(modelMatrix, 22.5, Vec3f(0, 1, 0));
注意定向光没有位置,因为它被定义为无穷远。然而,为了实现 Depth Map,我们必须从光的透视图渲染场景,因此需要在光的方向上的某个点渲染场景。假定光源位于 -light_dir * 10 的位置并朝原点看去,LookAt 矩阵如下:
glm::mat4 lightView = glm::lookAt(-light_dir * 10, Vec3f(0, 0, 0), Vec3f(0, 1, 0));
我们使用的是定向光,所以使用正交投影来为光源创建透视图:
glm::mat4 lightProjection = glm::ortho(-5.f, 5.f, -5.f, 5.f, 1.0f, 20.f);
为了更好地表达阴影的效果,在光源与 head 模型之间渲染一个长方体来遮挡光照:
glm::mat4 bricksModelMat;
bricksModelMat = glm::translate(bricksModelMat, Vec3f(1, 0, 0));
bricksModelMat = glm::rotate(bricksModelMat, -45, Vec3f(0, 1, 0));
bricksModelMat = glm::scale(bricksModelMat, Vec3f(2, 1, 1));
现在渲染的效果如下,最后我们期望在 head 模型上看到长方体遮挡出来的阴影:

Depth Map
为了生成 depth map,我们需要定义一组新的 shader,它的顶点着色器如下:
class DepthVertexShader : public VertexShader
{
public:virtual void ConfirmVaryingVar() override {}virtual Vec4f vertex(std::shared_ptr<VertexInfoBase> vertexInfos) override{glm::mat4 modelMatrix = GetUniformVar<glm::mat4>("Model");glm::mat4 lightSpaceMatrix = GetUniformVar<glm::mat4>("lightSpaceMatrix");return lightSpaceMatrix * modelMatrix * Vec4f(vertexInfos->location, 1.f);}
};
顶点着色器只将顶点转换到光空间即可。lightSpaceMatrix 就是将顶点转换到光空间的变换矩阵:
depthProgram->SetUniformVar<glm::mat4>("lightSpaceMatrix", lightProjection * lightView);
片段着色器也很简单,因为我们只关心渲染完成之后的 zbuffer,所以不用进行任何操作:
class DepthFragmentShader : public FragmentShader
{
public:virtual bool fragment(FragmentInfo& info) override{return false;}
};
我们定一个新的 zbuffer 数组专门用来存储深度值:
float* depthMapBuffer;
depthMapBuffer = new float[width * height];
std::fill(depthMapBuffer, depthMapBuffer + width * height, std::numeric_limits<float>::max());
渲染完成之后,将 depthMapBuffer 的值输出到纹理中:
std::shared_ptr<TGAImage> depthMap = std::make_shared<TGAImage>(width, height, TGAImage::RGB);
for (int i = 0; i < width * height; i++)
{int x = i % width;int y = i / width;if (depthMapBuffer[i] >= 1){ depthMap->set(x, y, white);}else{unsigned int color = depthMapBuffer[i] * 255;depthMap->set(x, y, TGAColor(color, color, color, 255));}
}
depthMap->flip_vertically();
depthMap->write_tga_file("depthMap.tga");

可以观察到长方体的颜色更偏黑,代表深度值小,位于更前面。
正常渲染
第二步就是正常的渲染场景。在顶点着色器中,我们使用相同的 lightSpaceMatrix,将世界空间顶点位置转换为光空间。顶点着色器传递一个普通的经变换的世界空间顶点位置 worldPos 和一个光空间的 posForLightSpace 给片段着色器。
片段着色器使用 Blinn-Phong 光照模型渲染场景。我们会计算出一个 shadow 值,当片段在阴影中时是 1.0,在阴影外是 0.0。然后,diffuse 和 specular 颜色会乘以这个阴影分量。由于散射(环境光照)的存在,模型不会完全黑暗,所以不会对 ambient 分量进行乘法。
Vec3f I = ambient + (1 - shadow) * (diffuse + specular);
剩下要做的就是计算阴影分量 shadow。要检查片段是否处于阴影中,首先要做的是将光空间片段位置转换为裁剪空间的标准化设备坐标(NDC),进行透视除法:
float shadow = 0.f;
Vec3f projCoords = posForLightSpace / posForLightSpace.w;
这会将坐标转换到 [ − 1 , 1 ] [-1,1] [−1,1] 之间。当使用正交投影矩阵时,顶点 w 分量保持不变,所以这一步实际上毫无意义。可是,当使用透视投影的时候就是必须的了,所以为了保证在两种投影矩阵下都有效就得留着这行。
随后我们需要将坐标转化到 [ 0 , 1 ] [0,1] [0,1] 之间:
projCoords = projCoords * 0.5 + Vec3f(0.5, 0.5, 0.5);
然后就可以对 depth map 进行采样了,得到最近的深度值:
float closestDepth = depthMap->texture(int(projCoords.x), int(projCoords.y)).r / 255.f;
然后将最近深度值与当前深度值进行比较,判断当前片段是否位于阴影之中:
float currentDepth = projCoords.z;
shadow = (currentDepth > closestDepth) ? 1.f : 0.f;

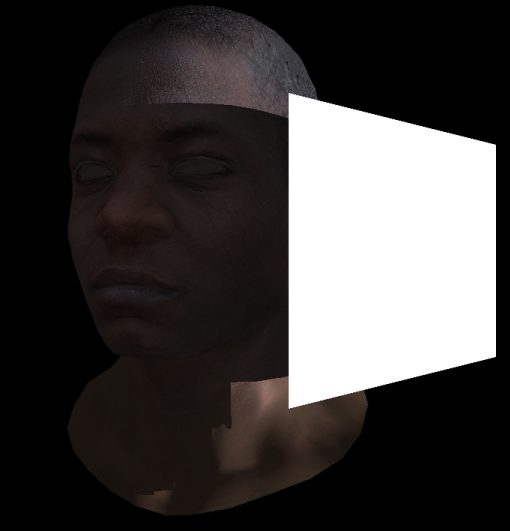
渲染出来的效果还不错,但是仔细观察红圈地方,你会发现这里出现了阴影!为什么会这样呢?这个问题被称为:Shadow Acne。
由于 Depth Map 受到分辨率的限制,在距离光源较远的情况下,多个片段可能从 Depth Map 的同一个值中采样。图中的每个斜坡代表 Depth Map 的一个单独纹理像素。可以看到,多个片段用同一个深度值进行采样。
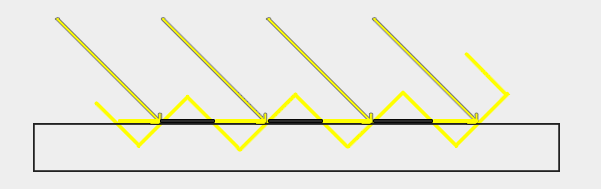
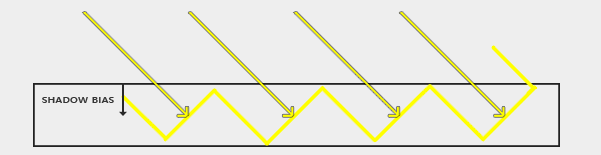
虽然很多时候没问题,但是当光源以一个角度朝向表面时就会出现问题,在这种情况下,Depth Map 也是从一个角度下渲染的。多个片段会从同一个斜坡的 Depth Map 像素中采样,图中黄色与黑色交界处为实际采样点,左边区域的像素与光源的距离小于采样点则是明亮的(表面上面),右边区域的像素与光源的距离大于采样点则存在阴影(表面下面);这样我们所得到的阴影就有了差异。因此,有些片段被认为是在阴影之中,有些不在,由此产生了图中的条纹样式。
我们可以用一个叫做阴影偏移(shadow bias)的技巧来解决这个问题,我们简单地对表面的深度(或 Depth Map)应用一个偏移量,这样片段就不会被错误地认为在表面之下了。
使用偏移量后,所有采样点都获得了比表面深度更小的深度值(相当于所有点都更靠近了光源一些,但是 Depth Map 中的深度值没变),这样整个表面就正确地被照亮,没有任何阴影。我们可以这样实现这个偏移:
float bias = 0.0155f;
shadow = (currentDepth > closestDepth + bias) ? 1.f : 0.f;
需要注意的是这个 bias 值的大小完全取决于你渲染表面的坡度大小,不同的模型可能需要不同的 bias,有一个更加可靠的办法是根据表面朝向光线的角度更改偏移量,使用点乘:
float bias = std::max(0.0155 * (1.0 - std::max(normal.dot(lightDir), 0.f)), 0.001);
在 tinyrenderer 原教程中,并没有对 depth map 采样来获得深度值,而是直接访问 depthMapBuffer 缓冲区内的深度值来得到最近深度值的,这样也是可行的:
// 计算阴影
float shadow = 0.f;
{Vec4f projCoords = posForLightSpace / posForLightSpace.w;//projCoords = projCoords * 0.5 + Vec3f(0.5, 0.5, 0.5);//float closestDepth = depthMap->texture(projCoords.x, projCoords.y).r / 255.f;projCoords = m_program->GetViewPort() * projCoords;float closestDepth = depthMapBuffer[int(projCoords.x) + int(projCoords.y) * width];float currentDepth = projCoords.z;float bias = std::max(0.015 * (1.0 - std::max(normal.dot(lightDir), 0.f)), 0.001);shadow = (currentDepth > closestDepth + bias) ? 1.f : 0.f;
}
请格外注意我这部分代码:int(projCoords.x) + int(projCoords.y) * width ,强制类型转换的地方,因为循环遍历像素的时候,我们相当于直接截断了小数部分。
这种实现方式也会出现相似的问题:Z-fighting,所以也需要 bias 来缓解。

归根结底,Z-fighting 与 Shadow Acne 都是精度不够而导致的深度采样竞争,bias 能缓解但不能根除,而且也会带来其它的问题。
本次代码提交记录:

参考
- tinyrenderer
- 阴影映射 - LearnOpenGL CN
others
tinyrenderer 的工作暂时告一段落,还剩下最后一篇环境光遮蔽(Ambient Occlusion,AO)没有实现,当然重点是 SSAO——屏幕空间环境光遮蔽。SSAO 的理论其实并不复杂,但受限于我目前实现的框架,真正做的时候束手束脚的。现在缺少哪些必备功能呢?
TGAImage 能够存储 float 类型的数据 ——> Multiple Render Target 多重渲染目标 ——> 延迟着色 ——> SSAO
上面是我的理想工作流程,但这样一看花费的时间就有点多了。现在还有很多东西没学,所以暂告一段落吧。后面在推进这个软光栅项目时,肯定会进行大范围重构的。
最后感叹一句,有些东西看起来很简单,但是有很多坑,手动实现光栅化流程确实受益匪浅!