B站Michale_ee——ESP32_IDF SDK——FreeRTOS_2 队列
一、通过队列传递三种类型数据(整型、结构体、指针)
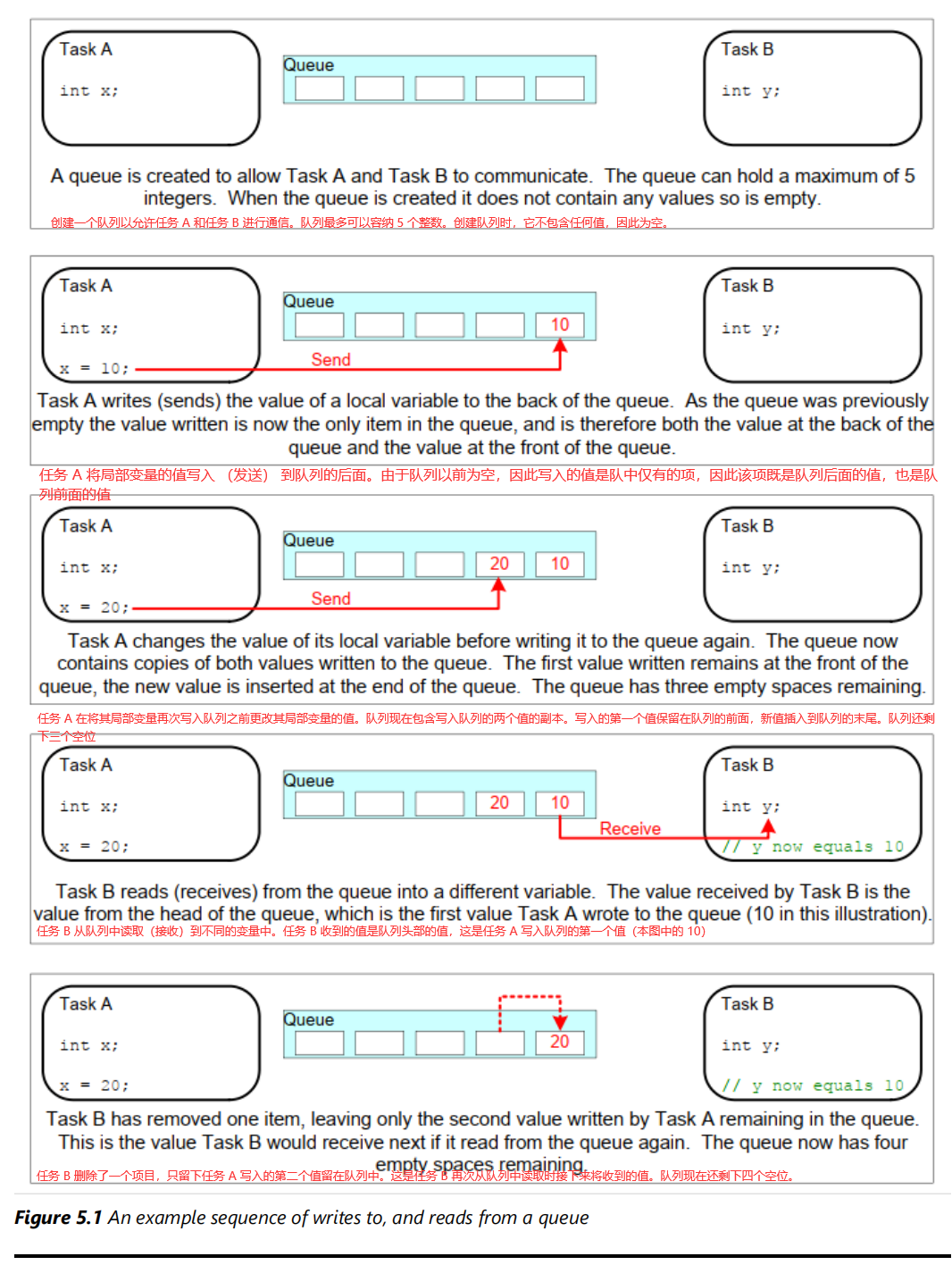
1.队列简介
- FreeRTOS中的队列本质就是一个先入先出的缓冲区(FIFO,First Input First Output)
2.API简介
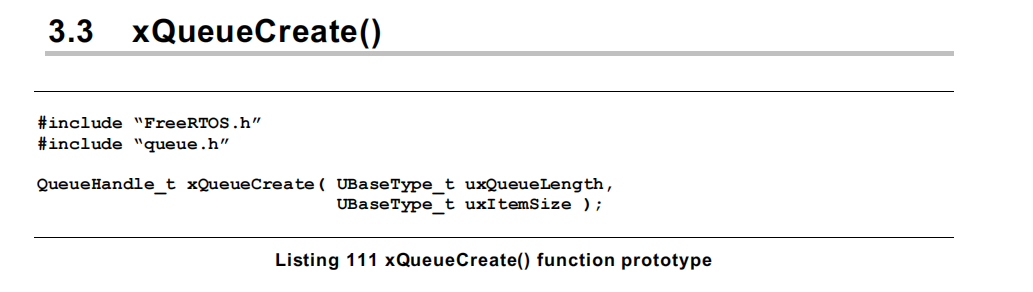
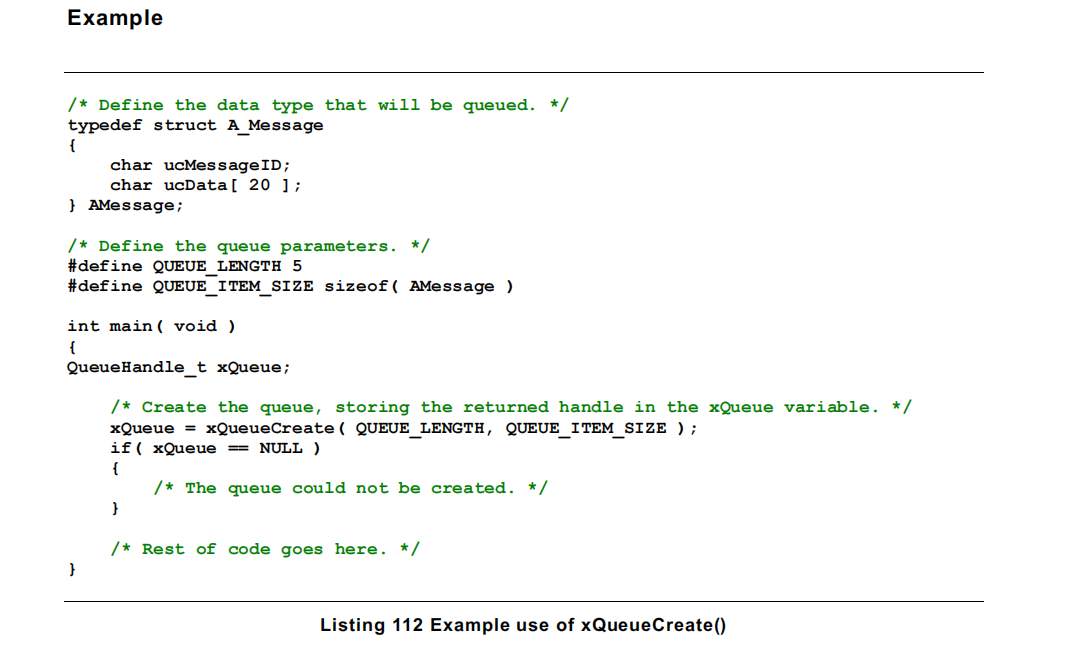
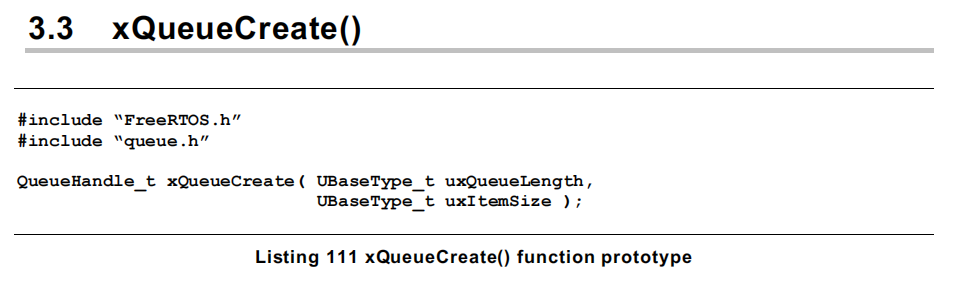
(1)创建队列的API

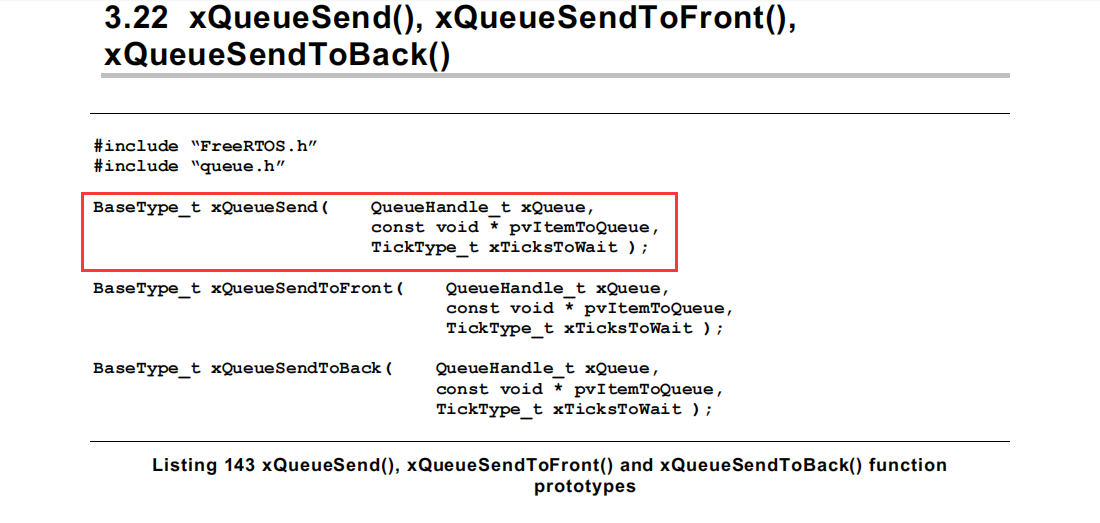
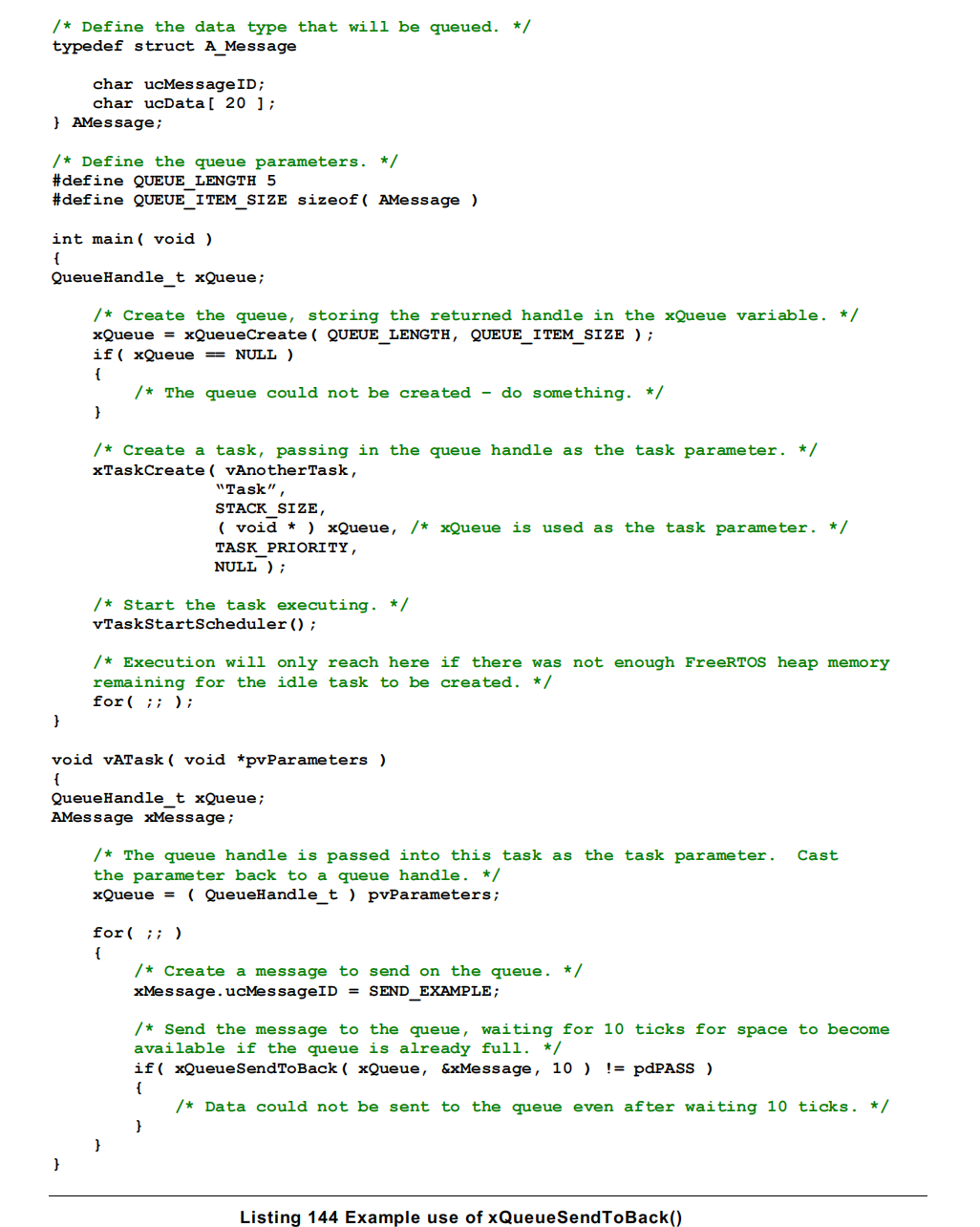
(2)发送数据到队列的API

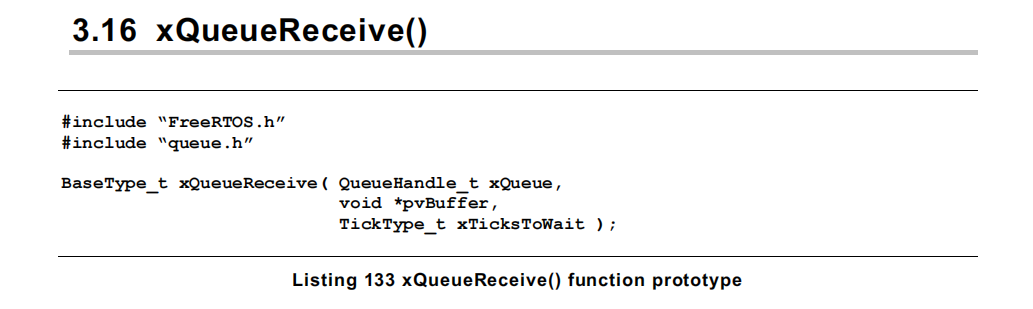
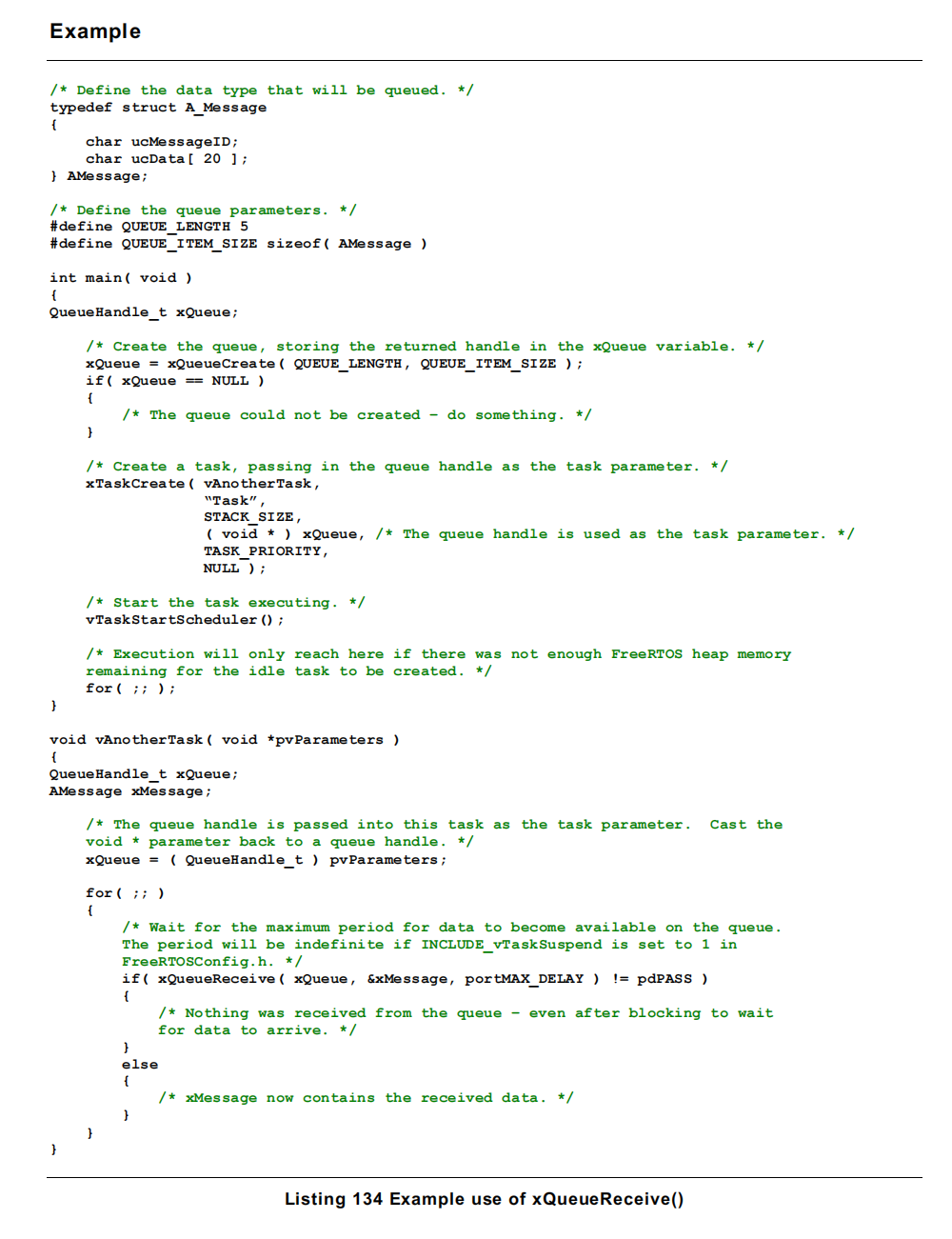
(3)从队列中接收数据的API

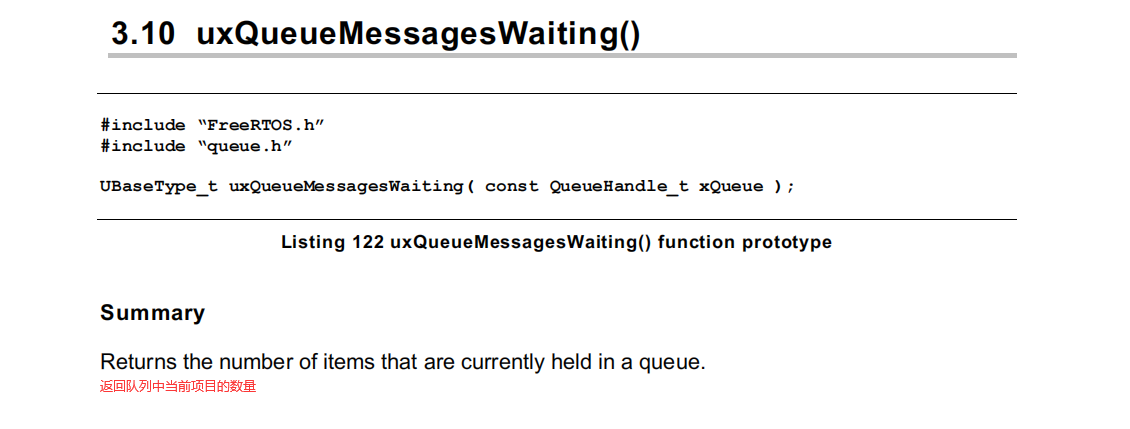
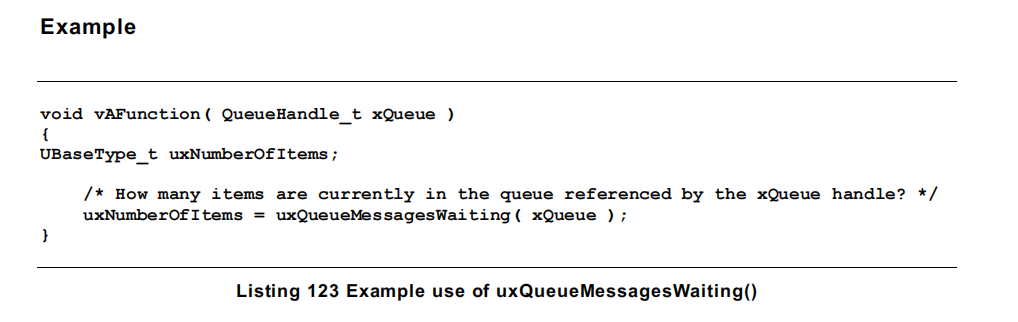
(4)查询当前队列中项的数量

3.示例代码及运行结果
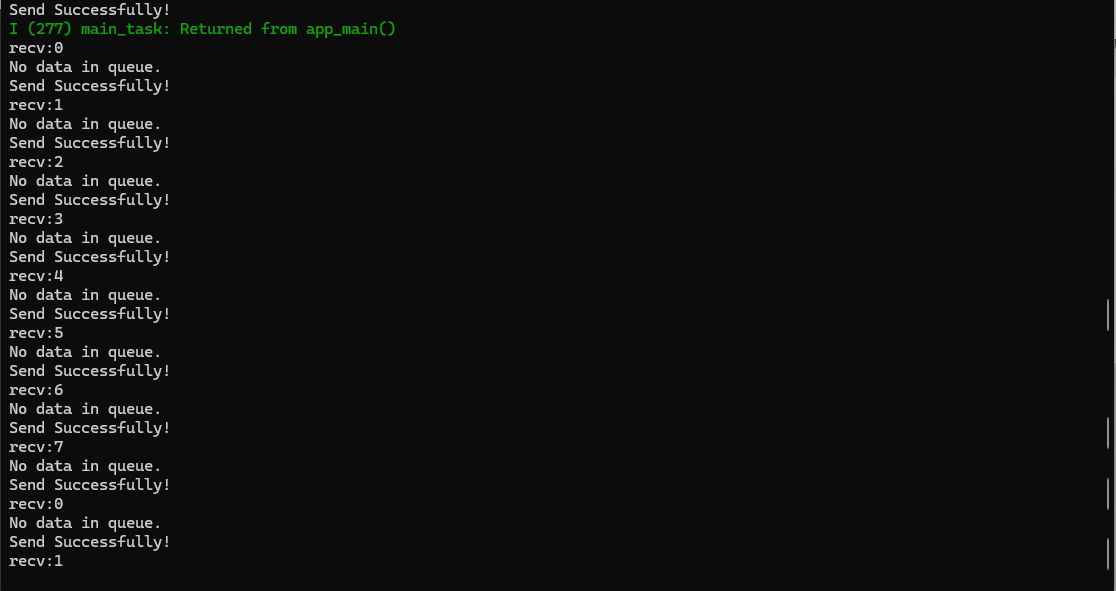
(1)通过队列传递整型数据
#include <stdio.h>
#include <inttypes.h>
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_chip_info.h"
#include "esp_flash.h"
#include "esp_system.h"
#include "freertos/queue.h" // add by lxlTaskHandle_t SendTask_Handle = NULL;
TaskHandle_t RecvTask_Handle = NULL;void SendTask(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;int i = 0;while(1){xStatus = xQueueSend(QHandle, &i, 0);if(xStatus == pdPASS){printf("Send Successfully!\n");}else{printf("Send Fail!\n");}i++;i%=8;vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void RecvTask(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;int i = 0;while(1){if(uxQueueMessagesWaiting(QHandle) != 0){xStatus = xQueueReceive(QHandle, &i, 0);if(xStatus == pdPASS){printf("recv:%d\n", i);}else{printf("recv fail\n");}}else{printf("No data in queue.\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void app_main(void)
{QueueHandle_t QHandle = NULL;QHandle = xQueueCreate(5, sizeof(int));if(QHandle != NULL){printf("Create Queue Successfully!\n");xTaskCreate(SendTask, "SendTask", 1024 *5, (void *)QHandle, 1, &SendTask_Handle); //! FreeRTOS的任务优先级值越大,优先级越高;xTaskCreate(RecvTask, "RecvTask", 1024 *5, (void *)QHandle, 1, &RecvTask_Handle);}else{printf("Create Queue Fail\n");}
}

(2)通过队列传递结构体类型数据
#include <stdio.h>
#include <inttypes.h>
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_chip_info.h"
#include "esp_flash.h"
#include "esp_system.h"
#include "freertos/queue.h" // add by lxlTaskHandle_t SendTask_Handle = NULL;
TaskHandle_t RecvTask_Handle = NULL;typedef struct A_Struct{char MessageID;char Data;
} xStruct;void SendTask(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;xStruct xSendData = {0, 1};while(1){xStatus = xQueueSend(QHandle, &xSendData, 0);if(xStatus == pdPASS){printf("Send Successfully!\n");}else{printf("Send Fail!\n");}xSendData.MessageID++;xSendData.MessageID %= 8;vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void RecvTask(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;xStruct RecvData={0,0};while(1){if(uxQueueMessagesWaiting(QHandle) != 0){xStatus = xQueueReceive(QHandle, &RecvData, 0);if(xStatus == pdPASS){printf("recv:ID->%d;Data->%d\n", RecvData.MessageID, RecvData.Data);}else{printf("recv fail\n");}}else{printf("No data in queue.\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void app_main(void)
{QueueHandle_t QHandle = NULL;QHandle = xQueueCreate(5, sizeof(xStruct));if(QHandle != NULL){printf("Create Queue Successfully!\n");xTaskCreate(SendTask, "SendTask", 1024 *5, (void *)QHandle, 1, &SendTask_Handle); //! FreeRTOS的任务优先级值越大,优先级越高;xTaskCreate(RecvTask, "RecvTask", 1024 *5, (void *)QHandle, 1, &RecvTask_Handle);}else{printf("Create Queue Fail\n");}
}
(3)通过队列传递指针类型的数据
#include <stdio.h>
#include <inttypes.h>
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_chip_info.h"
#include "esp_flash.h"
#include "esp_system.h"
#include "freertos/queue.h" // add by lxlTaskHandle_t SendTask_Handle = NULL;
TaskHandle_t RecvTask_Handle = NULL;#define DATA_NUM 5
#define DATA_SIZE 50void SendTask(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;char * pStrToSend = NULL;int i = 0;while(1){pStrToSend = malloc(DATA_SIZE);snprintf(pStrToSend, DATA_SIZE, "Today is a good day! ->%d\r\n", i);xStatus = xQueueSend(QHandle, &pStrToSend, 0); //! 注意此处传递的是指针的地址,即指针的指针;if(xStatus == pdPASS){printf("Send Successfully!\n");}else{printf("Send Fail!\n");}i++;i%=8;vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void RecvTask(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;char * pStrToRecv = NULL;while(1){if(uxQueueMessagesWaiting(QHandle) != 0){xStatus = xQueueReceive(QHandle, &pStrToRecv, 0);if(xStatus == pdPASS){printf("recv:%s\n", pStrToRecv);}else{printf("recv fail\n");}}else{printf("No data in queue.\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void app_main(void)
{QueueHandle_t QHandle = NULL;QHandle = xQueueCreate(DATA_NUM, DATA_SIZE);if(QHandle != NULL){printf("Create Queue Successfully!\n");xTaskCreate(SendTask, "SendTask", 1024 *5, (void *)QHandle, 1, &SendTask_Handle); //! FreeRTOS的任务优先级值越大,优先级越高;xTaskCreate(RecvTask, "RecvTask", 1024 *5, (void *)QHandle, 1, &RecvTask_Handle);}else{printf("Create Queue Fail\n");}
}

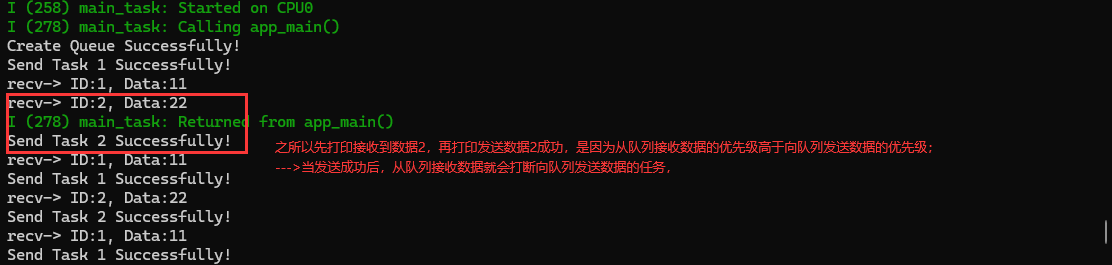
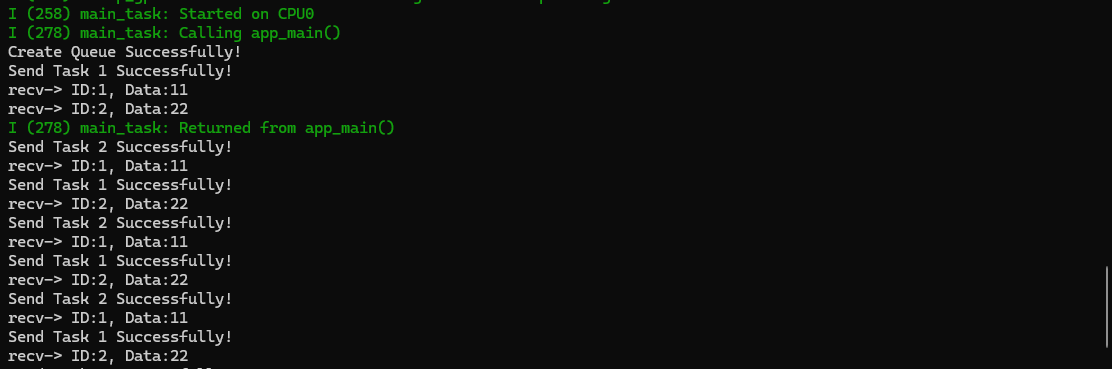
二、队列多进单出传递数据
1.简介
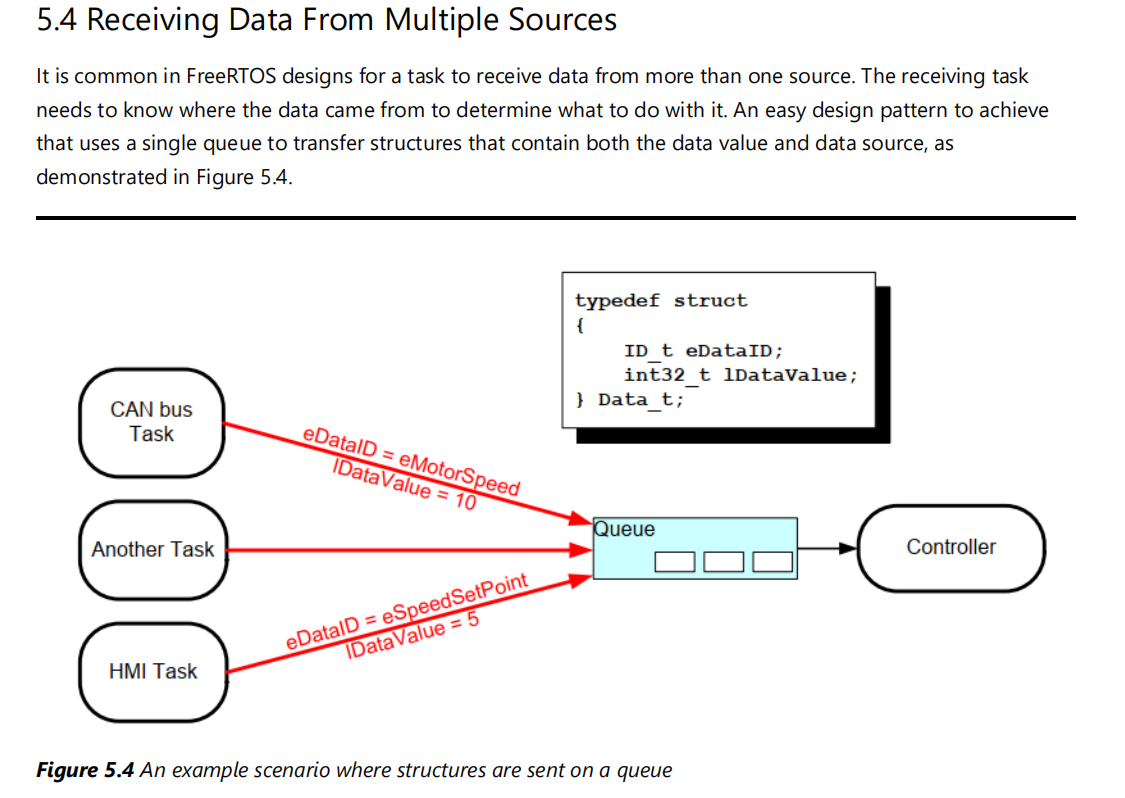
- 在队列多进单出的情况下,通常从队列接收数据的任务设置为较高的优先级,并且接收队列的API等待时间设置为portMAX_DELAY。这样当队列中没有数据时,从队列接收数据的任务就会阻塞等待;一旦队列中有数据,从队列接收数据的任务就会读取数据。向队列发送数据的任务可根据数据重要性分配优先级;
2.示例代码及运行结果
#include <stdio.h>
#include <inttypes.h>
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_chip_info.h"
#include "esp_flash.h"
#include "esp_system.h"
#include "freertos/queue.h" // add by lxlTaskHandle_t SendTask_Handle = NULL;
TaskHandle_t RecvTask_Handle = NULL;typedef struct
{char DataID;int Data;
} Data_t;void SendTask1(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {1, 11};while(1){xStatus = xQueueSend(QHandle, &SendData, 0); //! 注意此处传递的是指针的地址,即指针的指针;if(xStatus == pdPASS){printf("Send Task 1 Successfully!\n");}else{printf("Send Task 1 Fail!\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void SendTask2(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {2, 22};while(1){xStatus = xQueueSend(QHandle, &SendData, 0); //! 注意此处传递的是指针的地址,即指针的指针;if(xStatus == pdPASS){printf("Send Task 2 Successfully!\n");}else{printf("Send Task 2 Fail!\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void RecvTask(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t RecvData = {0, 0};while(1){xStatus = xQueueReceive(QHandle, &RecvData, portMAX_DELAY);if(xStatus == pdPASS){printf("recv-> ID:%d, Data:%d\n", RecvData.DataID, RecvData.Data);}else{printf("recv fail\n");}}
}void app_main(void)
{QueueHandle_t QHandle = NULL;QHandle = xQueueCreate(5, sizeof(Data_t));if(QHandle != NULL){printf("Create Queue Successfully!\n");xTaskCreate(SendTask1, "SendTask1", 1024 *5, (void *)QHandle, 1, NULL); //! FreeRTOS的任务优先级值越大,优先级越高;xTaskCreate(SendTask2, "SendTask2", 1024 *5, (void *)QHandle, 1, NULL);xTaskCreate(RecvTask, "RecvTask", 1024 *5, (void *)QHandle, 2, &RecvTask_Handle);}else{printf("Create Queue Fail\n");}
}
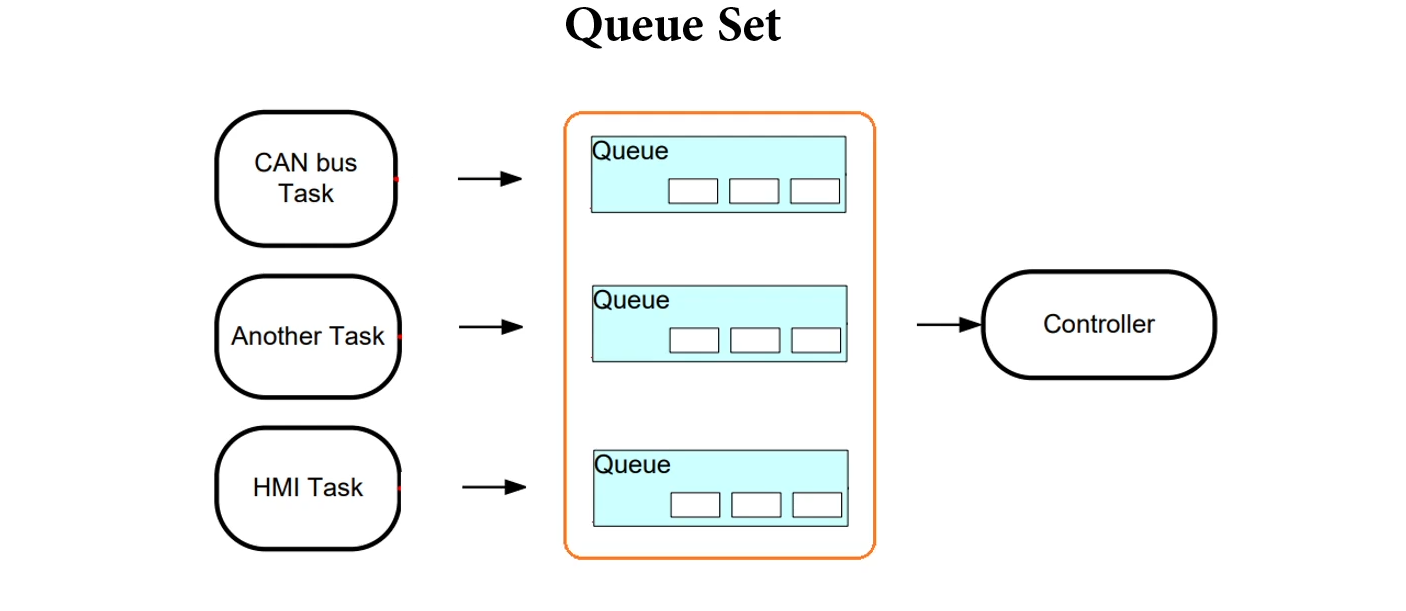
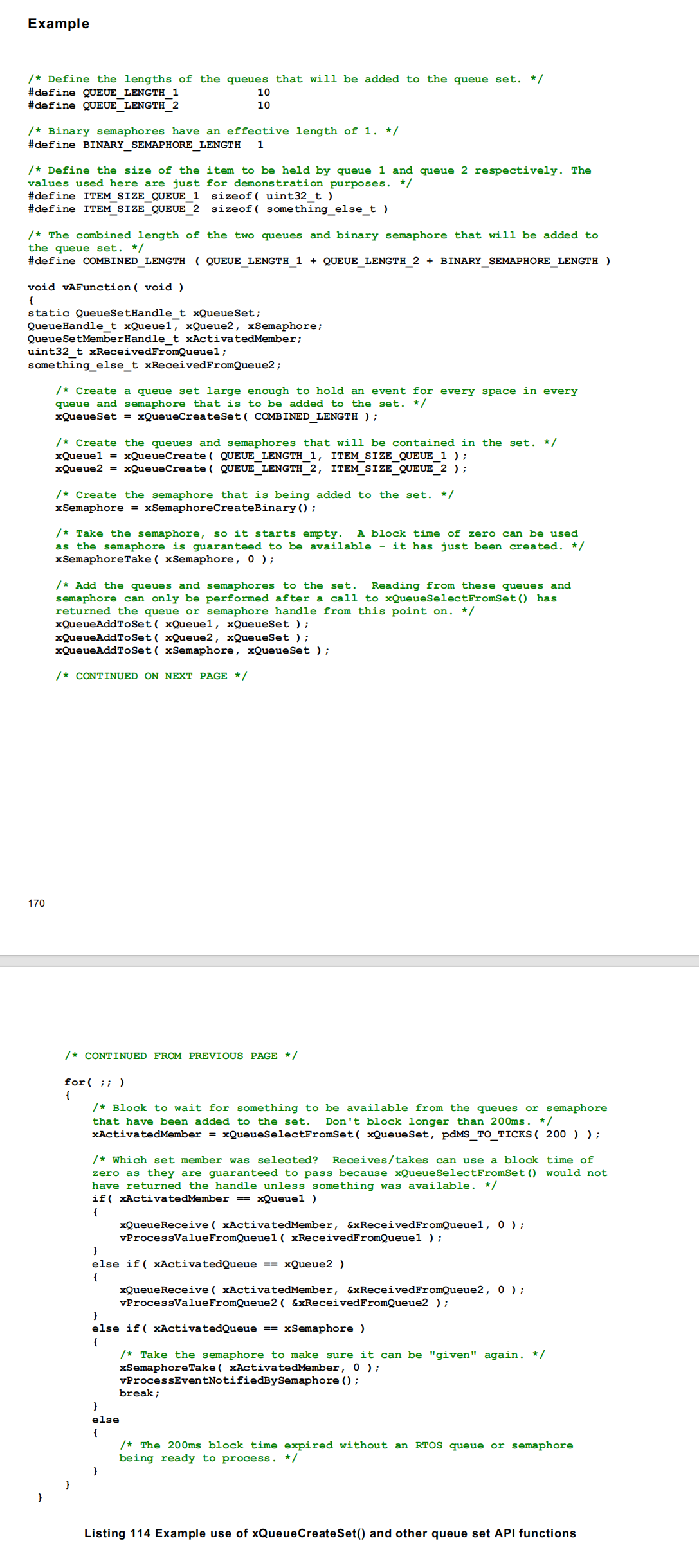
三、队列集合
1.简介
2.API简介
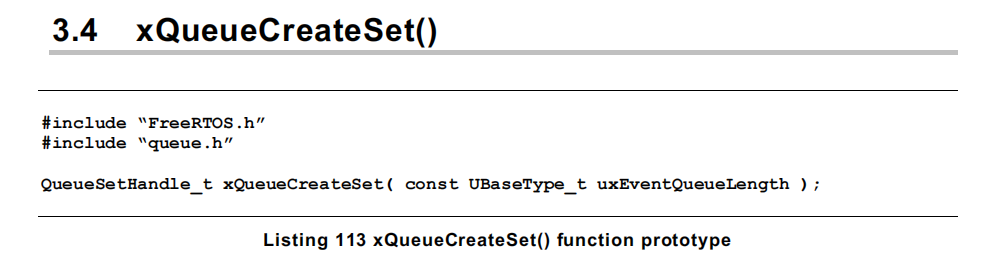
(1)创建队列集合
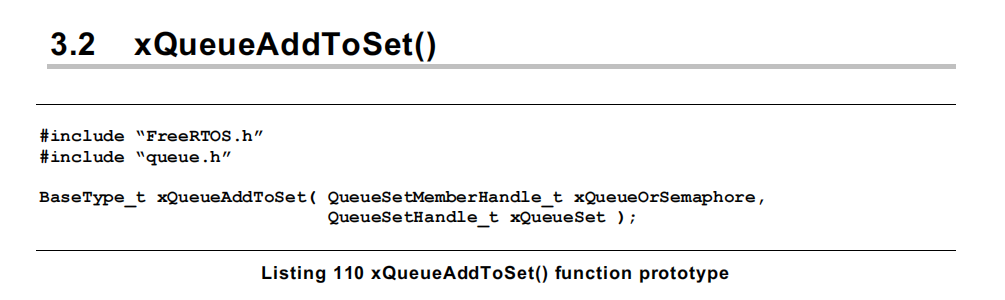
(2)将队列添加到队列集合
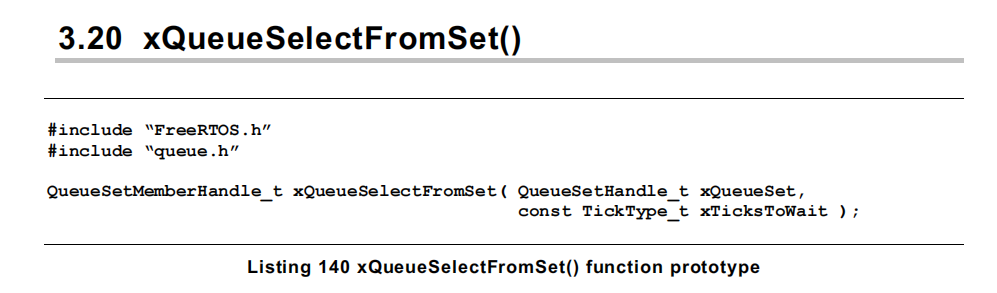
(3)从队列集合中选择有数据的队列

(4)官方示例
3.示例代码及运行结果
#include <stdio.h>
#include <inttypes.h>
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_chip_info.h"
#include "esp_flash.h"
#include "esp_system.h"
#include "freertos/queue.h" // add by lxlTaskHandle_t SendTask_Handle = NULL;
TaskHandle_t RecvTask_Handle = NULL;typedef struct
{char DataID;int Data;
} Data_t;void SendTask1(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {1, 11};while(1){xStatus = xQueueSend(QHandle, &SendData, 0); //! 注意此处传递的是指针的地址,即指针的指针;if(xStatus == pdPASS){printf("Send Task 1 Successfully!\n");}else{printf("Send Task 1 Fail!\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void SendTask2(void *pvParam)
{QueueHandle_t QHandle = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {2, 22};while(1){xStatus = xQueueSend(QHandle, &SendData, 0); //! 注意此处传递的是指针的地址,即指针的指针;if(xStatus == pdPASS){printf("Send Task 2 Successfully!\n");}else{printf("Send Task 2 Fail!\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void RecvTask(void *pvParam)
{QueueSetHandle_t QueueSet = (QueueSetHandle_t)pvParam;QueueSetMemberHandle_t QueueData;BaseType_t xStatus;Data_t RecvData = {0, 0};while(1){QueueData = xQueueSelectFromSet(QueueSet, portMAX_DELAY);xStatus = xQueueReceive(QueueData, &RecvData, portMAX_DELAY);if(xStatus == pdPASS){printf("recv-> ID:%d, Data:%d\n", RecvData.DataID, RecvData.Data);}else{printf("recv fail\n");}}
}void app_main(void)
{QueueHandle_t QHandle1 = NULL;QHandle1 = xQueueCreate(5, sizeof(Data_t));QueueHandle_t QHandle2 = NULL;QHandle2 = xQueueCreate(5, sizeof(Data_t));QueueSetHandle_t QueueSet;QueueSet = xQueueCreateSet(10); // 5+5xQueueAddToSet(QHandle1, QueueSet);xQueueAddToSet(QHandle2, QueueSet);if((QHandle1 != NULL) && (QHandle2 != NULL) && (QueueSet != NULL)){printf("Create Queue Successfully!\n");xTaskCreate(SendTask1, "SendTask1", 1024 *5, (void *)QHandle1, 1, NULL); //! FreeRTOS的任务优先级值越大,优先级越高;xTaskCreate(SendTask2, "SendTask2", 1024 *5, (void *)QHandle2, 1, NULL);xTaskCreate(RecvTask, "RecvTask", 1024 *5, (void *)QueueSet, 2, &RecvTask_Handle);}else{printf("Create Queue Fail\n");}
}
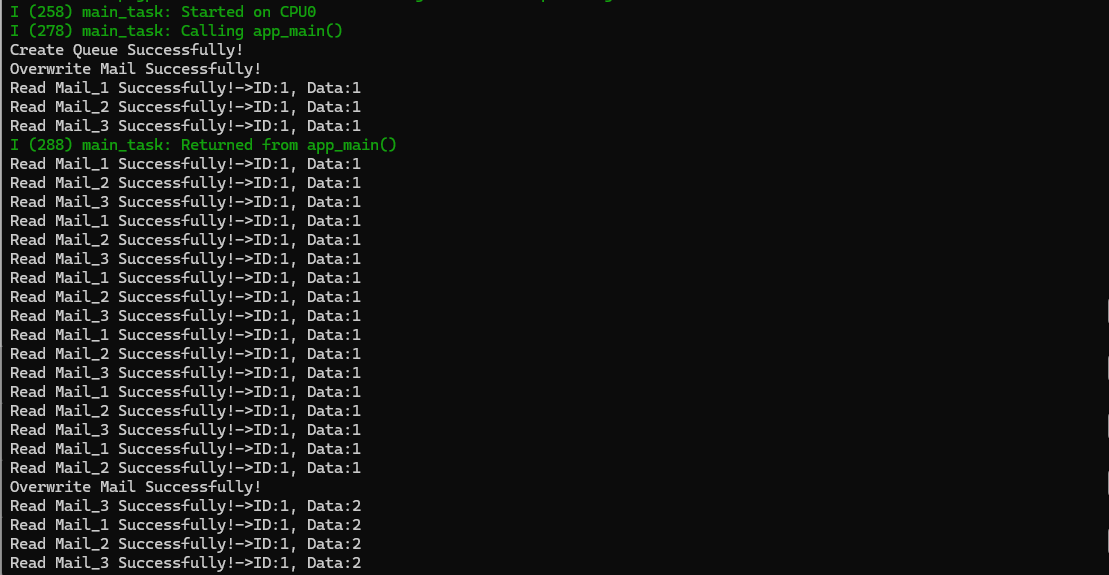
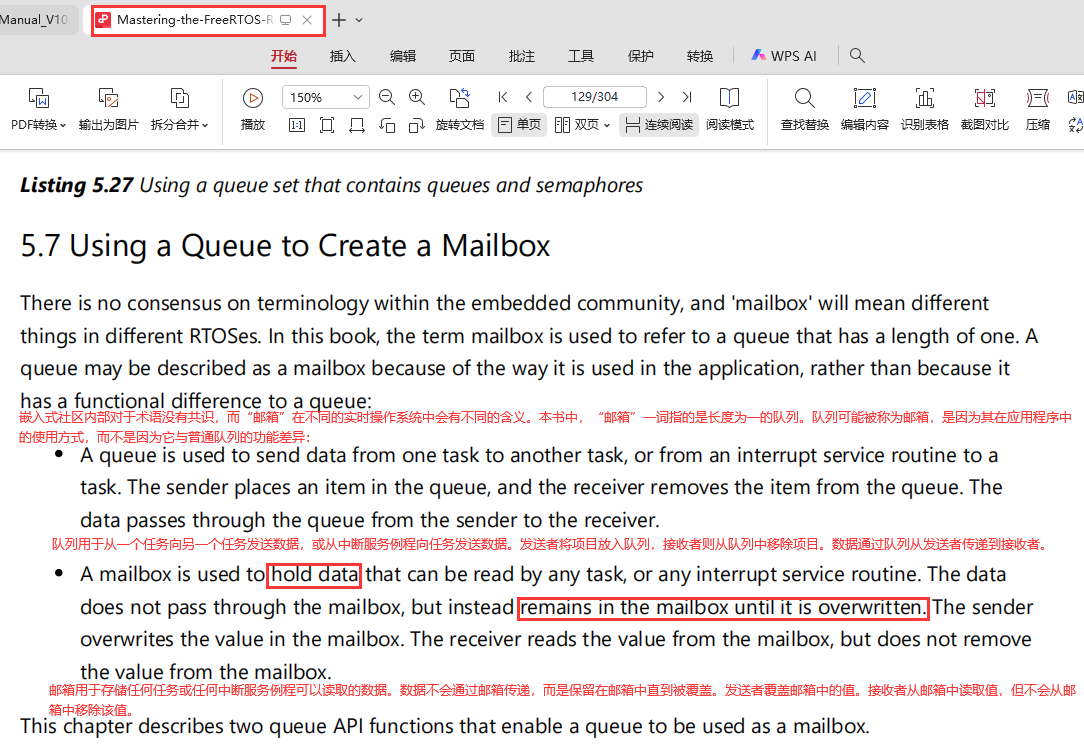
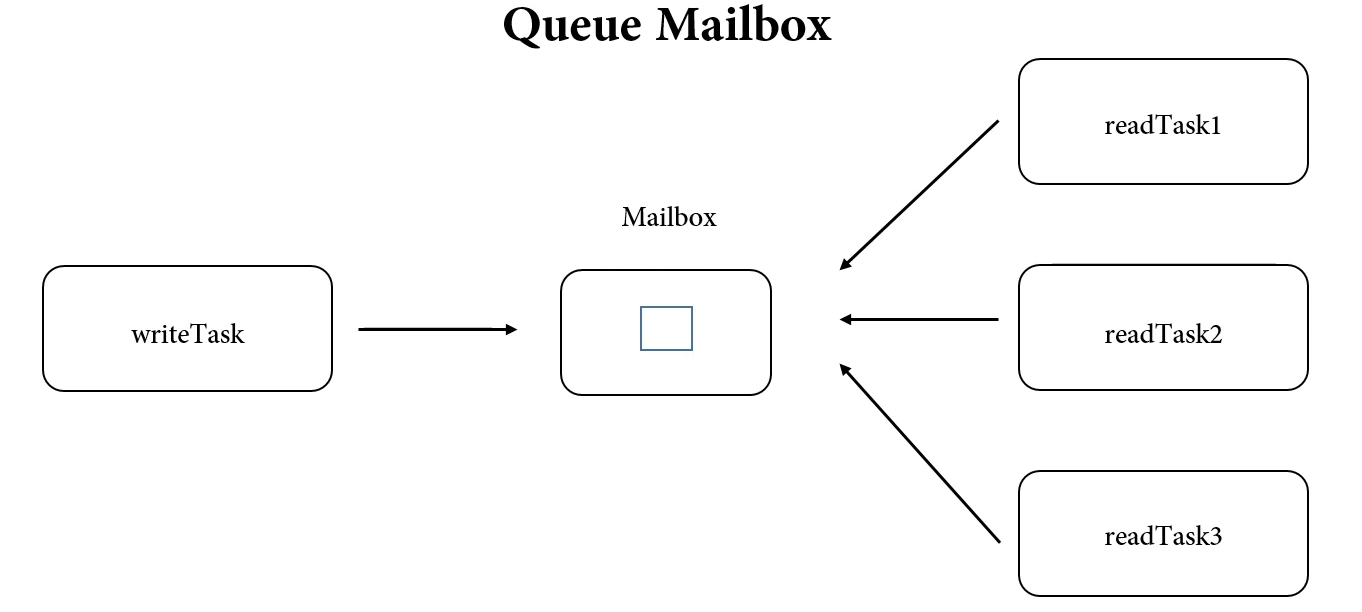
四、队列邮箱
1.简介
2.API简介
(1)创建队列邮箱(使用创建队列的API,把项目数设为1即可)
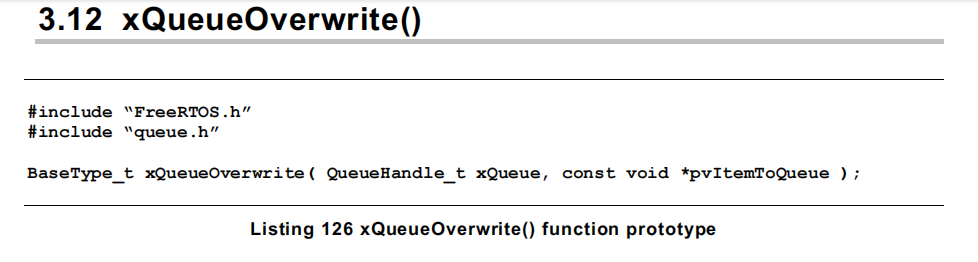
(2)向邮箱写数据

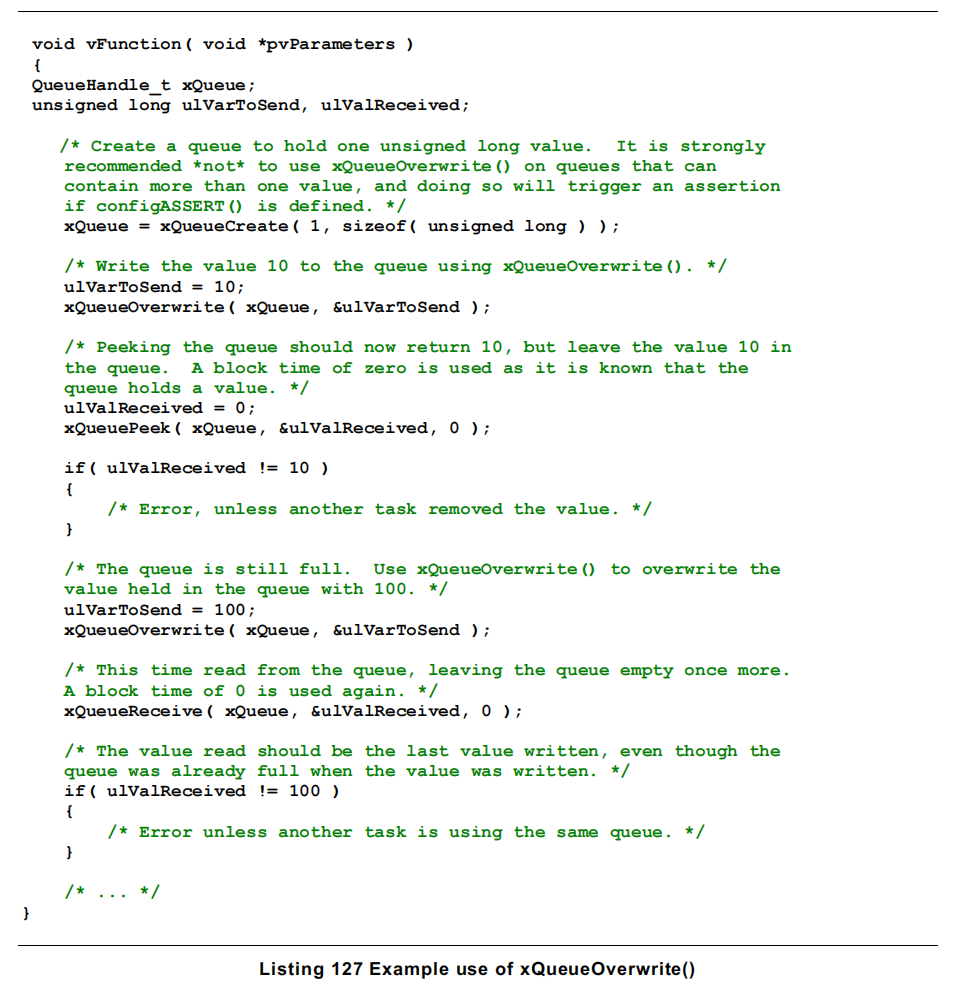
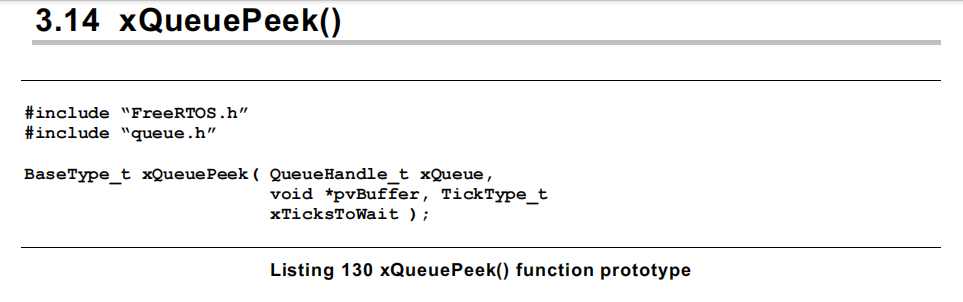
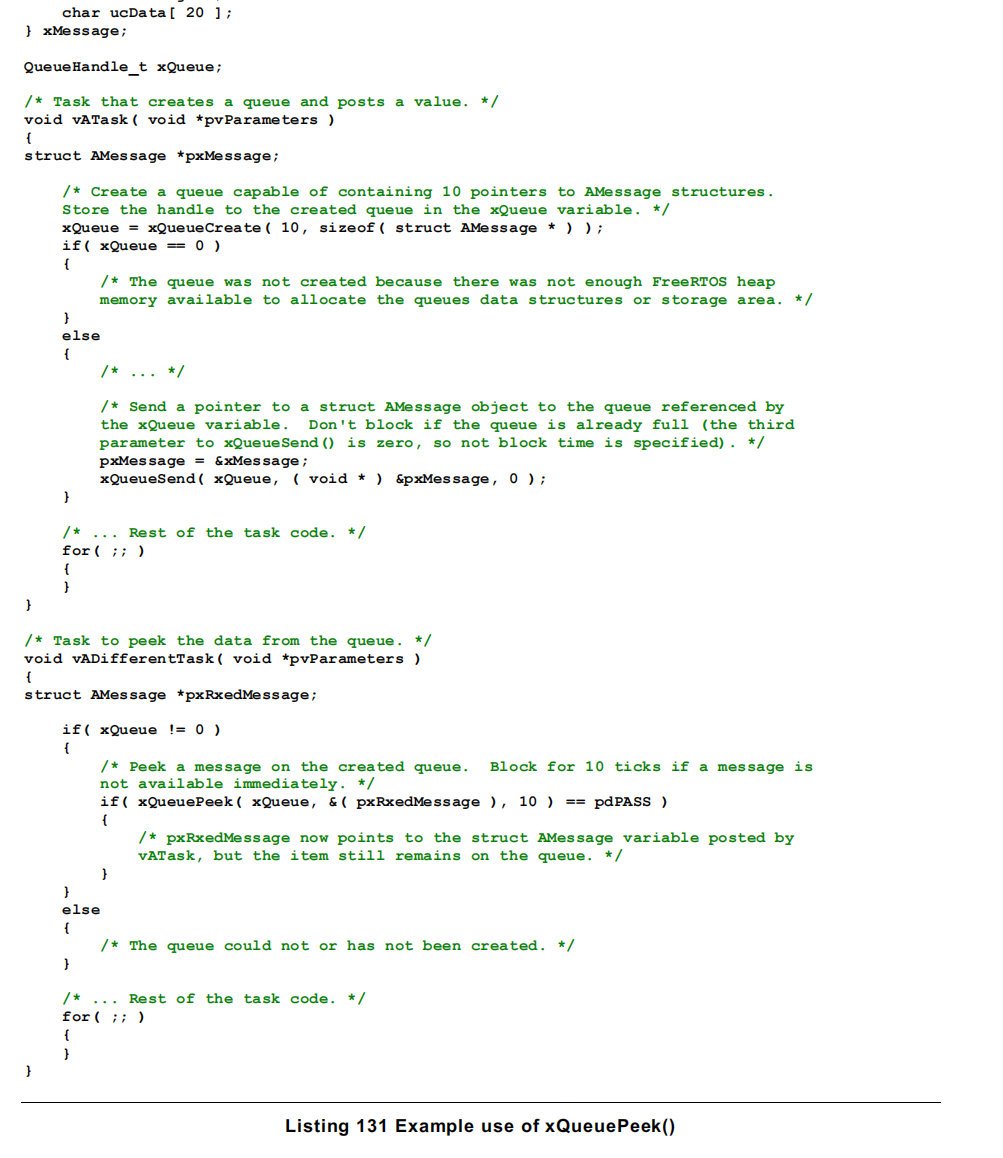
(3)从邮箱中读数据(读取后数据依然保存在队列中)
3.示例代码及运行结果
#include <stdio.h>
#include <inttypes.h>
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_chip_info.h"
#include "esp_flash.h"
#include "esp_system.h"
#include "freertos/queue.h" // add by lxlTaskHandle_t SendTask_Handle = NULL;
TaskHandle_t RecvTask_Handle = NULL;typedef struct
{char DataID;int Data;
} Data_t;void WriteTask(void *pvParam)
{QueueHandle_t Mailbox = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {1, 1};while(1){xStatus = xQueueOverwrite(Mailbox, &SendData); if(xStatus == pdPASS){printf("Overwrite Mail Successfully!\n");}else{printf("Overwrite Mail Fail!\n");}SendData.Data ++;SendData.Data %= 8;vTaskDelay(6000 / portTICK_PERIOD_MS);}
}void ReadTask1(void *pvParam)
{QueueHandle_t Mailbox = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {0, 0};while(1){xStatus = xQueuePeek(Mailbox, &SendData, portMAX_DELAY); if(xStatus == pdPASS){printf("Read Mail_1 Successfully!->ID:%d, Data:%d\n", SendData.DataID, SendData.Data);}else{printf("Read Mail_1 Fail!\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void ReadTask2(void *pvParam)
{QueueHandle_t Mailbox = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {0, 0};while(1){xStatus = xQueuePeek(Mailbox, &SendData, portMAX_DELAY); if(xStatus == pdPASS){printf("Read Mail_2 Successfully!->ID:%d, Data:%d\n", SendData.DataID, SendData.Data);}else{printf("Read Mail_2 Fail!\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void ReadTask3(void *pvParam)
{QueueHandle_t Mailbox = (QueueHandle_t)pvParam;BaseType_t xStatus;Data_t SendData = {0, 0};while(1){xStatus = xQueuePeek(Mailbox, &SendData, portMAX_DELAY); if(xStatus == pdPASS){printf("Read Mail_3 Successfully!->ID:%d, Data:%d\n", SendData.DataID, SendData.Data);}else{printf("Read Mail_3 Fail!\n");}vTaskDelay(1000 / portTICK_PERIOD_MS);}
}void app_main(void)
{QueueHandle_t Mailbox = NULL;Mailbox = xQueueCreate(1, sizeof(Data_t)); // 队列邮箱项目个数为1if(Mailbox != NULL){printf("Create Queue Successfully!\n");xTaskCreate(WriteTask, "WriteTask", 1024 *5, (void *)Mailbox, 1, NULL); //! FreeRTOS的任务优先级值越大,优先级越高;xTaskCreate(ReadTask1, "ReadTask1", 1024 *5, (void *)Mailbox, 2, NULL);xTaskCreate(ReadTask2, "ReadTask1", 1024 *5, (void *)Mailbox, 2, NULL);xTaskCreate(ReadTask3, "ReadTask1", 1024 *5, (void *)Mailbox, 2, NULL);}else{printf("Create Queue Fail\n");}
}