4:机器人目标识别无序抓取程序二次开发
判断文件是否存在
//判断文件在不在
int HandEyeCalib::AnsysFileExists(QString FileAddr)
{QFile File1(FileAddr);if(!File1.exists()){QMessageBox::warning(this,QString::fromLocal8Bit("提示"),FileAddr+QString::fromLocal8Bit("文件不存在"));return -1;}else{return 0;}
}
图像九点坐标的获取与显示
1.首先进行九点标定
在UI界面上添加九点标定QT设计师类
在主程序中声明此类头文件,并添加此界面
.h文件
private:
//手眼标定类HandEyeCalib *m_PHandEyeCalib=NULL;.cpp文件
m_PHandEyeCalib=new HandEyeCalib();ui->MainTab->addTab(m_PHandEyeCalib,QString::fromLocal8Bit("标定"));if(m_PHandEyeCalib!=NULL){delete m_PHandEyeCalib;m_PHandEyeCalib=NULL;}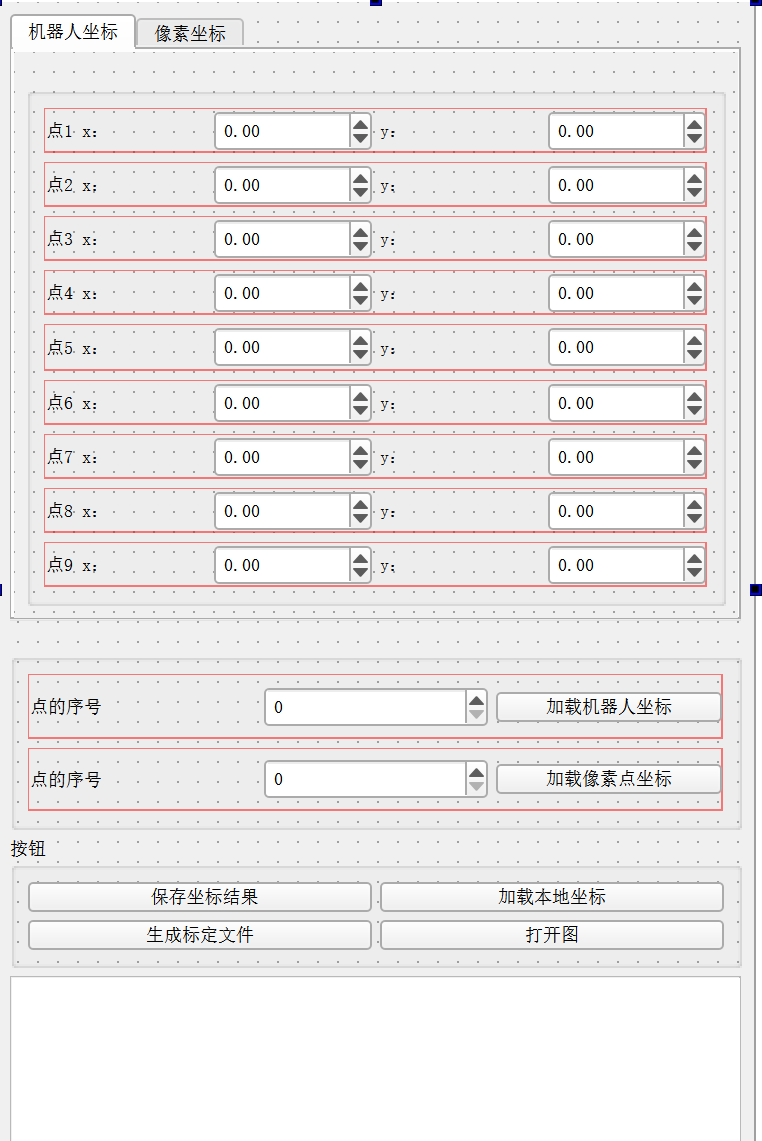
第一步应该是打开一张拍摄好的九点图像,或者是打开相机现场采集。
则读图操作为:
//读图
void HandEyeCalib::on_pB_OpenImage_clicked()
{//调取 不同的图像 在这里完成测试//传入路径QString path = QFileDialog::getOpenFileName(this,"选择图片","","JPG文件(*.jpg;*.bmp)");if(path == "") return;//read imageHTuple file2=HTuple(path.toStdString().c_str());ReadImage(&halconImage,file2);//2592 1544SetPart(WindowHandle, 0, 0, 1544, 2592);DispObj(halconImage,WindowHandle);
}
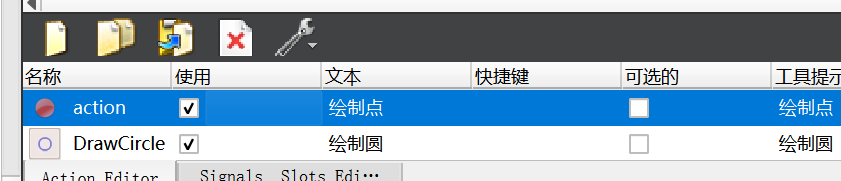
绘制像素坐标点或者圆
可以现在HALCON中编写程序,如何导出C++添加到QT中
//绘制点
void MainWindow::on_action_triggered()
{HObject Cross;DrawPoint(WindowHandle, &Row, &Column);GenCrossContourXld(&Cross, Row, Column, 116, 0.785398);DispObj(Cross, WindowHandle);
}由于绘制的点,在九点标定类中需要用到,所以要把得到的XY坐标点声明在全局变量中
HTuple Row, Column; //绘制点然后在九点标定类的上面引用这两个变量(这是个通用方法,如果两个类都需要用到同一个变量,则可以使用此方法;也可以利用信号与槽机制)
extern HTuple Row, Column; //画点 -在得到像素点之后,则可以显示加载在界面上
//加载显示像素点
void HandEyeCalib::on_pB_LoadPixelCoord_clicked()
{// Row 的长度为0// try catch ----HTuple Length;TupleLength(Row, &Length);if(Length[0].D()==0){QMessageBox::warning(this,"warning",QString::fromLocal8Bit("数据异常"));return;}//点1if(ui->spinBox_PointNum2->value()==1){//界面的点1 的 xy 更新为 row columnui->x_17->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_17->setValue(Column[0].D());}//点2if(ui->spinBox_PointNum2->value()==2){//界面的点1 的 xy 更新为 row columnui->x_18->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_18->setValue(Column[0].D());}//点3if(ui->spinBox_PointNum2->value()==3){//界面的点1 的 xy 更新为 row columnui->x_19->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_19->setValue(Column[0].D());}//点4if(ui->spinBox_PointNum2->value()==4){//界面的点1 的 xy 更新为 row columnui->x_20->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_20->setValue(Column[0].D());}//点5if(ui->spinBox_PointNum2->value()==5){//界面的点1 的 xy 更新为 row columnui->x_21->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_21->setValue(Column[0].D());}//点6if(ui->spinBox_PointNum2->value()==6){//界面的点1 的 xy 更新为 row columnui->x_22->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_22->setValue(Column[0].D());}//点7if(ui->spinBox_PointNum2->value()==7){//界面的点1 的 xy 更新为 row columnui->x_23->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_23->setValue(Column[0].D());}//点8if(ui->spinBox_PointNum2->value()==8){//界面的点1 的 xy 更新为 row columnui->x_24->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_24->setValue(Column[0].D());}//点9if(ui->spinBox_PointNum2->value()==9){//界面的点1 的 xy 更新为 row columnui->x_25->setValue(Row[0].D()); //HTUPLE 转换为 doubleui->y_25->setValue(Column[0].D());}}机械臂坐标的获取与显示
包含库目录
include文件
lib文件
realse文件
![]()
.pro目录
INCLUDEPATH += $$PWD/include/libfairinoLIBS += -L$$PWD/lib/FairinoLib/ -lfairino
LIBS += -L$$PWD/lib/FairinoLib/ -lfairinod头文件声明
#include <QWidget>
#include "robot.h"
#ifdef WINDOWS_OPTION
#include <string.h>
#include <windows.h>
#elif LINUX_OPTION
#include <cstdlib>
#include <iostream>
#include <stdio.h>
#include <cstring>
#include <unistd.h>
#endif#include <chrono>
#include <thread>添加机械臂的UI类,并在主函数中声明添加界面
.h文件
//法奥机器人类FairinoRobtics *m_pFairinoRobtics=NULL;
.cpp文件
//机器人UI类的实例化m_pFairinoRobtics= new FairinoRobtics();ui->MainTab->addTab(m_pFairinoRobtics,QString::fromLocal8Bit("法奥机器人"));if(m_pFairinoRobtics!=NULL){delete m_pFairinoRobtics;m_pFairinoRobtics=NULL;}获取坐标
在机械臂类中,实例化具体的对象 —名字叫:robot
FRRobot robot;//声明机器人对象连接机械臂
void FairinoRobtics::on_pushButton_2_clicked()
{robot.RPC("192.168.1.2");
}获取当前坐标点
void FairinoRobtics::on_ptn_ModifyA_clicked()
{GetTargetTCPPose(nowPos);//获取坐标函数RobX=nowPos.tran.x;RobY=nowPos.tran.y;}//获取坐标定义
void FairinoRobtics::GetTargetTCPPose(DescPose &nowPos)
{int ret=robot.GetActualTCPPose(0,&nowPos);ui->Dx->setValue(nowPos.tran.x);ui->Dy->setValue(nowPos.tran.y);ui->Dz->setValue(nowPos.tran.z);ui->Drx->setValue(nowPos.rpy.rx);ui->Dry->setValue(nowPos.rpy.ry);ui->Drz->setValue(nowPos.rpy.rz);}
机械臂走点
void FairinoRobtics::on_pushButton_clicked()
{DescPose desc_pos;//创建一个笛卡尔空间位置数据memset(&desc_pos, 0, sizeof(DescPose));//初始化笛卡尔空间位置数据double x = ui->Dx->value();//取得ui空间的值(doubleSpinBox)double y = ui->Dy->value();//取得ui空间的值(doubleSpinBox)double z = ui->Dz->value();//取得ui空间的值(doubleSpinBox)double rx = ui->Drx->value();//取得ui空间的值(doubleSpinBox)double ry = ui->Dry->value();//取得ui空间的值(doubleSpinBox)double rz = ui->Drz->value();//取得ui空间的值(doubleSpinBox)desc_pos.tran.x = x; //为desc_pos赋值desc_pos.tran.y = y;desc_pos.tran.z = z;desc_pos.rpy.rx = rx;desc_pos.rpy.ry = ry;desc_pos.rpy.rz = rz;int tool = ui->sTool->value();int user = ui->sUser->value();double vel = 100;double acc = 100;double ovl = 100;double blendT = -1;double config = -1;robot.MoveCart(&desc_pos,tool,user,vel,acc,ovl,blendT,config);
}
在获取到坐标之后,需要把前两个参数传给九点标定的类中,所以需要把下面这两个坐标声明为全局变量
double RobX=1.5;
double RobY=1.6;然后在九点标定类中引用这两个点
extern double RobX;
extern double RobY;加载显示机械臂的点
void HandEyeCalib::on_pB_LoadRobCoord_clicked()
{if(ui->spinBox_PointNum1->value()==1) //value 获取值{ui->x_1->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_1->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点2if(ui->spinBox_PointNum1->value()==2) //value 获取值{ui->x_2->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_2->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点3if(ui->spinBox_PointNum1->value()==3) //value 获取值{ui->x_3->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_3->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点2if(ui->spinBox_PointNum1->value()==4) //value 获取值{ui->x_4->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_4->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点2if(ui->spinBox_PointNum1->value()==5) //value 获取值{ui->x_5->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_5->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点2if(ui->spinBox_PointNum1->value()==6) //value 获取值{ui->x_6->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_6->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点2if(ui->spinBox_PointNum1->value()==7) //value 获取值{ui->x_7->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_7->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点2if(ui->spinBox_PointNum1->value()==8) //value 获取值{ui->x_8->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_8->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}//点2if(ui->spinBox_PointNum1->value()==9) //value 获取值{ui->x_9->setValue(RobX); //机器人类的变量 extern 引用,赋值 设置值ui->y_9->setValue(RobY); //机器人类的变量 extern 引用,赋值 设置值}
}上面已经完整对像素和机械臂的坐标加载显示;为了方便需要保存这些点
//保存所有点
void HandEyeCalib::on_pB_SaveParamters_clicked()
{//机器人坐标 ---QSeting ,htuple WriteTuple//像素坐标 PixelX,PixelYHTuple RobX,RobY,PixelX,PixelY;RobX = HTuple();RobX[0]=ui->x_1->value();RobX[1]=ui->x_2->value();RobX[2]=ui->x_3->value();RobX[3]=ui->x_4->value();RobX[4]=ui->x_5->value();RobX[5]=ui->x_6->value();RobX[6]=ui->x_7->value();RobX[7]=ui->x_8->value();RobX[8]=ui->x_9->value();RobY = HTuple();RobY[0]=ui->y_1->value();RobY[1]=ui->y_2->value();RobY[2]=ui->y_3->value();RobY[3]=ui->y_4->value();RobY[4]=ui->y_5->value();RobY[5]=ui->y_6->value();RobY[6]=ui->y_7->value();RobY[7]=ui->y_8->value();RobY[8]=ui->y_9->value();PixelX=HTuple();PixelX[0]=ui->x_17->value();PixelX[1]=ui->x_18->value();PixelX[2]=ui->x_19->value();PixelX[3]=ui->x_20->value();PixelX[4]=ui->x_21->value();PixelX[5]=ui->x_22->value();PixelX[6]=ui->x_23->value();PixelX[7]=ui->x_24->value();PixelX[8]=ui->x_25->value();PixelY = HTuple();PixelY[0]=ui->y_17->value();PixelY[1]=ui->y_18->value();PixelY[2]=ui->y_19->value();PixelY[3]=ui->y_20->value();PixelY[4]=ui->y_21->value();PixelY[5]=ui->y_22->value();PixelY[6]=ui->y_23->value();PixelY[7]=ui->y_24->value();PixelY[8]=ui->y_25->value();//判断文件夹是否存在QString FileAddr="./data/Param";QFile File1(FileAddr);if(File1.exists()){WriteTuple(RobX, "./data/Param/robX.tup");WriteTuple(RobY, "./data/Param/robY.tup");WriteTuple(PixelX, "./data/Param/RowS.tup");WriteTuple(PixelY, "./data/Param/ColumnS.tup");ui->textBrowser->append(QString::fromLocal8Bit("保存成功"));}else{ui->textBrowser->append(FileAddr+QString::fromLocal8Bit("文件不存在,无法保存"));}}
重新读图保存的坐标
void HandEyeCalib::on_pB_LoadParameters_clicked()
{HTuple RobX,RobY;QString FileAddr="./data/Param";QFile File1(FileAddr);try{if(File1.exists()){ReadTuple("./data/Param/robX.tup", &RobX);ReadTuple("./data/Param/robY.tup", &RobY);ui->textBrowser->append(QString::fromLocal8Bit("读取成功"));ui->x_1->setValue(RobX[0].D());ui->x_2->setValue(RobX[1].D());ui->x_3->setValue(RobX[2].D());ui->x_4->setValue(RobX[3].D());ui->x_5->setValue(RobX[4].D());ui->x_6->setValue(RobX[5].D());ui->x_7->setValue(RobX[6].D());ui->x_8->setValue(RobX[7].D());ui->x_9->setValue(RobX[8].D());ui->y_1->setValue(RobY[0].D());ui->y_2->setValue(RobY[1].D());ui->y_3->setValue(RobY[2].D());ui->y_4->setValue(RobY[3].D());ui->y_5->setValue(RobY[4].D());ui->y_6->setValue(RobY[5].D());ui->y_7->setValue(RobY[6].D());ui->y_8->setValue(RobY[7].D());ui->y_9->setValue(RobY[8].D());}else{ui->textBrowser->append(FileAddr+QString::fromLocal8Bit("文件不存在,无法保存"));}}catch(...){ui->textBrowser->append(FileAddr+QString::fromLocal8Bit("文件缺失"));}}因为保存点和重新读图点,都是数组点;可以现在HALCON软件中写好程序,然后导出更方便
最终生成标定文件
void HandEyeCalib::on_pB_GenCalibResult_clicked()
{HTuple RowS, ColumnS, RobX, RobY;HTuple HomMat2D;//1.获取 4---9个点的 像素坐标系RowS = HTuple();ColumnS = HTuple();RobX = HTuple();RobY = HTuple();QString FileAddr;FileAddr="./data/Param/robX.tup";//判断文件在不在int ret=AnsysFileExists( FileAddr);if(ret==-1){return;}FileAddr="./data/Param/robY.tup";ret=AnsysFileExists( FileAddr);if(ret==-1){return;}FileAddr="./data/Param/RowS.tup";ret=AnsysFileExists( FileAddr);if(ret==-1){return;}FileAddr="./data/Param/ColumnS.tup";ret=AnsysFileExists( FileAddr);if(ret==-1){return;}try{ReadTuple("./data/Param/robX.tup", &RobX);ReadTuple("./data/Param/robY.tup", &RobY);ReadTuple("./data/Param/RowS.tup", &RowS);ReadTuple("./data/Param/ColumnS.tup", &ColumnS);//生成一个矩阵 HomMat2DVectorToHomMat2d(RowS, ColumnS, RobX, RobY, &HomMat2D);WriteTuple(HomMat2D, "./data/Param/HomMat2D.tup"); //标定文件QMessageBox::warning(this,QString::fromLocal8Bit("提示"),QString::fromLocal8Bit("创建标定矩阵成功"));return;}catch(...){QMessageBox::warning(this,QString::fromLocal8Bit("提示"),QString::fromLocal8Bit("创建标定矩阵失败"));return;}}HALCON程序附录
保存、读图数组、绘制点、绘制圆
九点标定
*1.获取 4---9个点的 像素坐标系RowS:=[]ColumnS:=[]RobX:=[]RobY:=[]dev_open_window(0, 0, 512, 512, 'black', WindowHandle)* read_image(Image, '标定')
* draw_circle(WindowHandle, Row, Column, Radius)
* CenterCoord:=[Row, Column]Pose:=[253.871, 342.389]write_tuple(Pose,'./像素/Pose0.dat')Pose:=[253.487, 591.21]write_tuple(Pose,'./像素/Pose1.dat')Pose:=[251.388, 849.435]write_tuple(Pose,'./像素/Pose2.dat')Pose:=[496.451, 340.278]write_tuple(Pose,'./像素/Pose3.dat')Pose:=[499.304, 590.602]write_tuple(Pose,'./像素/Pose4.dat')Pose:=[502.83, 851.243]write_tuple(Pose,'./像素/Pose5.dat')Pose:=[707.115, 339.089]write_tuple(Pose,'./像素/Pose6.dat')Pose:=[700.256, 591.442]write_tuple(Pose,'./像素/Pose7.dat')Pose:=[694.649, 853.365]write_tuple(Pose,'./像素/Pose8.dat')*获取9个点的像素点for I := 0 to 8 by 1FileName:='./像素/Pose'+I+'.dat'read_tuple(FileName, Pose)RowS[I]:=Pose[0]ColumnS[I]:=Pose[1]endfor*获取9个点的机械手坐标*2获取4---9个点 机械手 坐标! (mm)for I := 11 to 19 by 1FileName:='./坐标/Pose'+I$'01d'+'.dat'read_pose(FileName, Pose)RobX[I-11]:=Pose[0]RobY[I-11]:=Pose[1]endfor*两者进行仿射变换 ,就可以得到 像素坐标和 机械手坐标的变换 。 *相机固定位置 , 机械手 定点拍照 都可以使用 *如果机械手移动拍照 , + 机械手 和标定 时刻拍照间的差值 !*生成一个矩阵 HomMat2Dvector_to_hom_mat2d(RowS ,ColumnS,RobX,RobY, HomMat2D)write_tuple(HomMat2D, 'HomMat2D')**识别图像的坐标 假如是RowS[0] ,ColumnS[0]*根据 这个矩阵 能否求出机械手坐标!Row1:=512Column1:= 640affine_trans_point_2d(HomMat2D,253.871, 342.389,Qx, Qy)TCP标定
1.法兰盘姿态换算到工具姿态
*法兰盘坐标 换算到 工具末端坐标*X219.108Y579.008Z364.915RX-179.026RY0.549RZ-64.079,2*法兰盘 坐标 记录pose1:=[219.108,579.008,364.915,-179.026,0.549,-64.079,2]*坐标换算 旋转轴2 换算到旋转轴0convert_pose_type(pose1, 'Rp+T', 'gba', 'point', Pose11)*标定的 工具与法兰盘的 位置 tcptcpPose:=[-5.593,7.166,249.3040,0,0,0,0]*法兰盘 换算到 工具坐标系pose_compose( Pose11,tcpPose, PoseCompose1)*工具坐表 旋转 状态变换convert_pose_type(PoseCompose1, 'Rp+T', 'abg', 'point', Pose22)if(Pose22[3]>180)Pose22[3]:=Pose22[3]-360 endifif(Pose22[4]>180)Pose22[4]:=Pose22[4]-360 endifif(Pose22[5]>180)Pose22[5]:=Pose22[5]-360 endif*Pose22 就是最终的姿态结果*[212.986, 584.908, 115.59, 180.92, 0.636037, 64.0786,2]2.工具姿态换算到法兰盘姿态
* 工具末端坐标换算到法兰盘坐标 *X212.988Y584.915Z115.59RX-179.026RY0.549RZ-64.079Pose22:=[212.986, 584.908, 115.59, -179.026, 0.549, -64.079, 2]*坐标换算 旋转轴2 换算到旋转轴0convert_pose_type(Pose22, 'Rp+T', 'gba', 'point', Pose2)*标定的 工具与法兰盘的 位置 tcptcpPose:=[-5.593,7.166,249.3040,0,0,0,0]*对标定结果进行逆变换pose_invert(tcpPose, PoseInvert1)pose_compose( Pose2, PoseInvert1, Pose11)*工具坐表 旋转 状态变换convert_pose_type(Pose11, 'Rp+T', 'abg', 'point', Pose1)if(Pose1[3]>180)Pose1[3]:=Pose1[3]-360 endifif(Pose1[4]>180)Pose1[4]:=Pose1[4]-360 endifif(Pose1[5]>180)Pose1[5]:=Pose1[5]-360 endif*Pose1 就是最终的姿态结果*[219.108, 579.008, 364.915, -179.026, 0.549, -64.079, 2]*法兰盘 坐标 记录*pose1:=[219.108,579.008,364.915,-179.026,0.549,-64.079,2]已经看到这里了,点个赞和关注吧!
刚开始写文章,如有不足请多多包含;之后会持续更新关于(halcon学习,VS联合编程,QT联合编程,C++,C#,Opencv图像处理库,三维点云库pcl,相机以及机器人的二次开发)等系统化学习文章。