机器手电机驱动器小体积解决方案
市场背景
随着工业4.0与人工智能技术的深度融合,智能机器人正加速渗透至医疗、物流、制造及服务等核心领域。据行业分析显示,2023年全球协作机器人市场规模同比增长23%,其中高精度关节驱动与小型化硬件设计成为技术迭代的关键需求。然而,传统电机驱动器普遍存在体积大、功耗高、抗干扰能力弱等问题,难以满足复杂场景下机器人灵活操控与空间受限的挑战。
方案概述
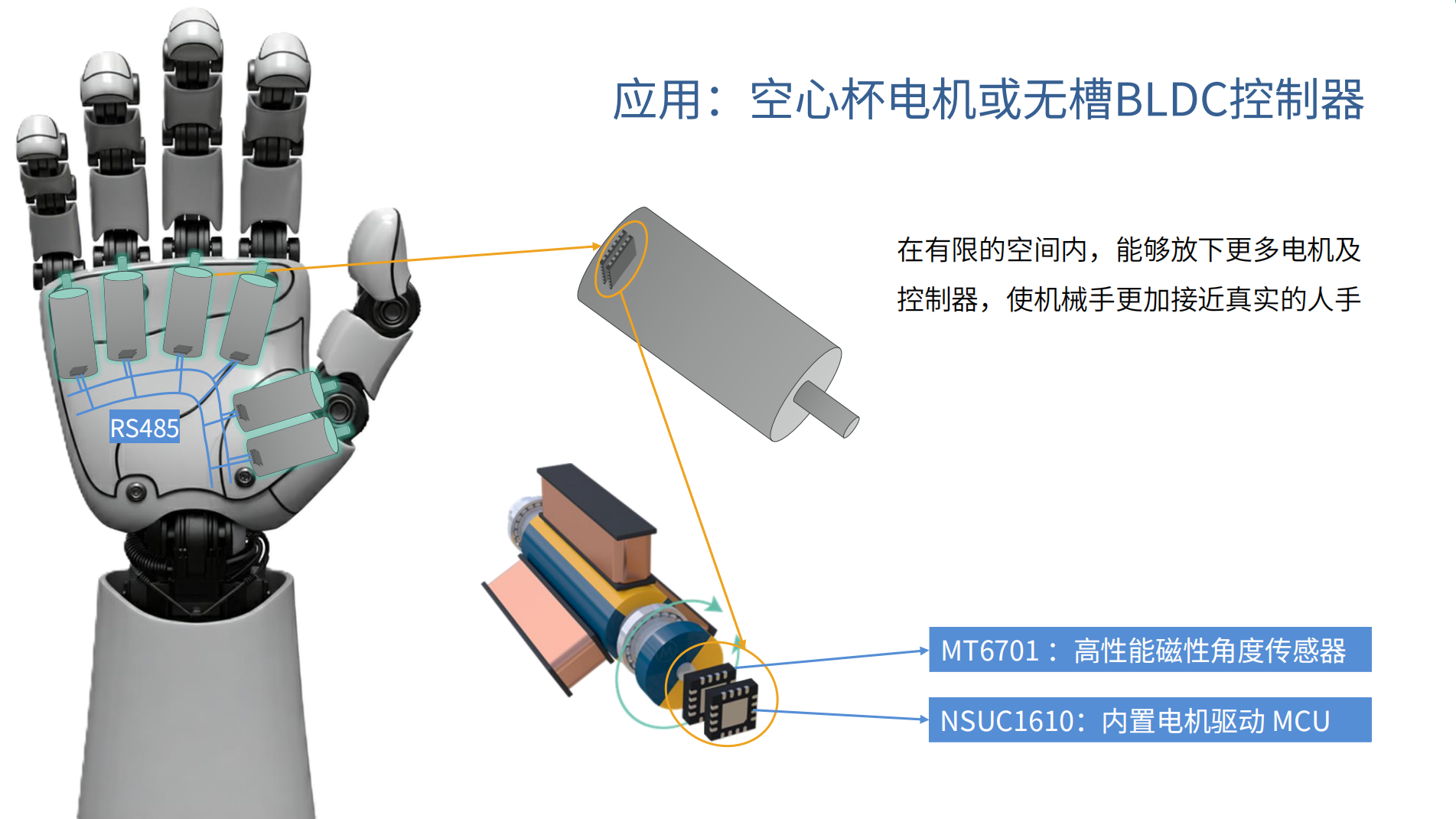
机器手电机驱动器小体积解决方案 基于纳芯微 NSUC1610 和 麦歌恩 MT6701,板载 485 收发器,在有限的空间内,实现完整的机械手 BLDC 电机控制,可用于12V~18V电机,最高1.8A电流驱动。
功能框图
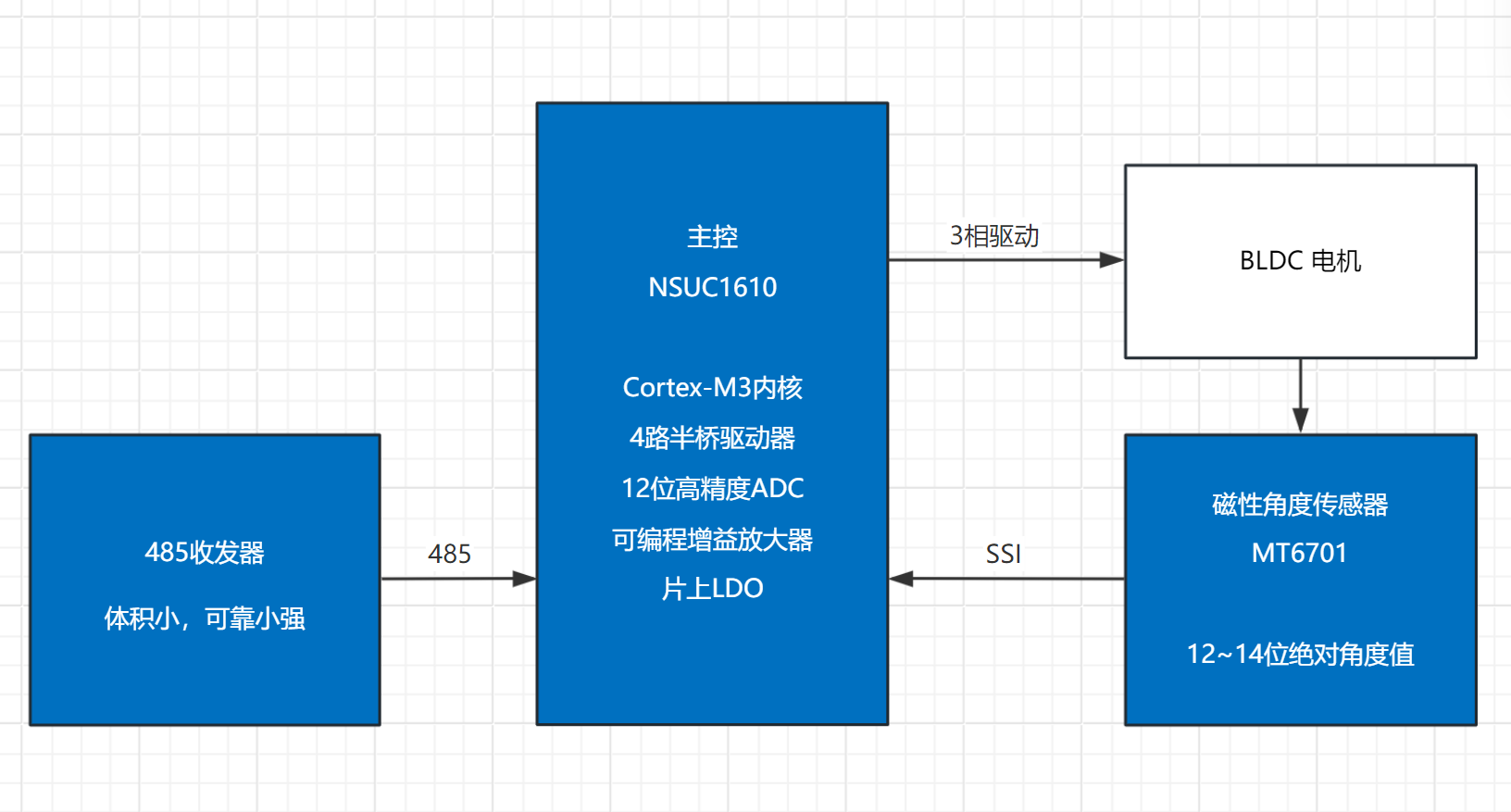
产品介绍
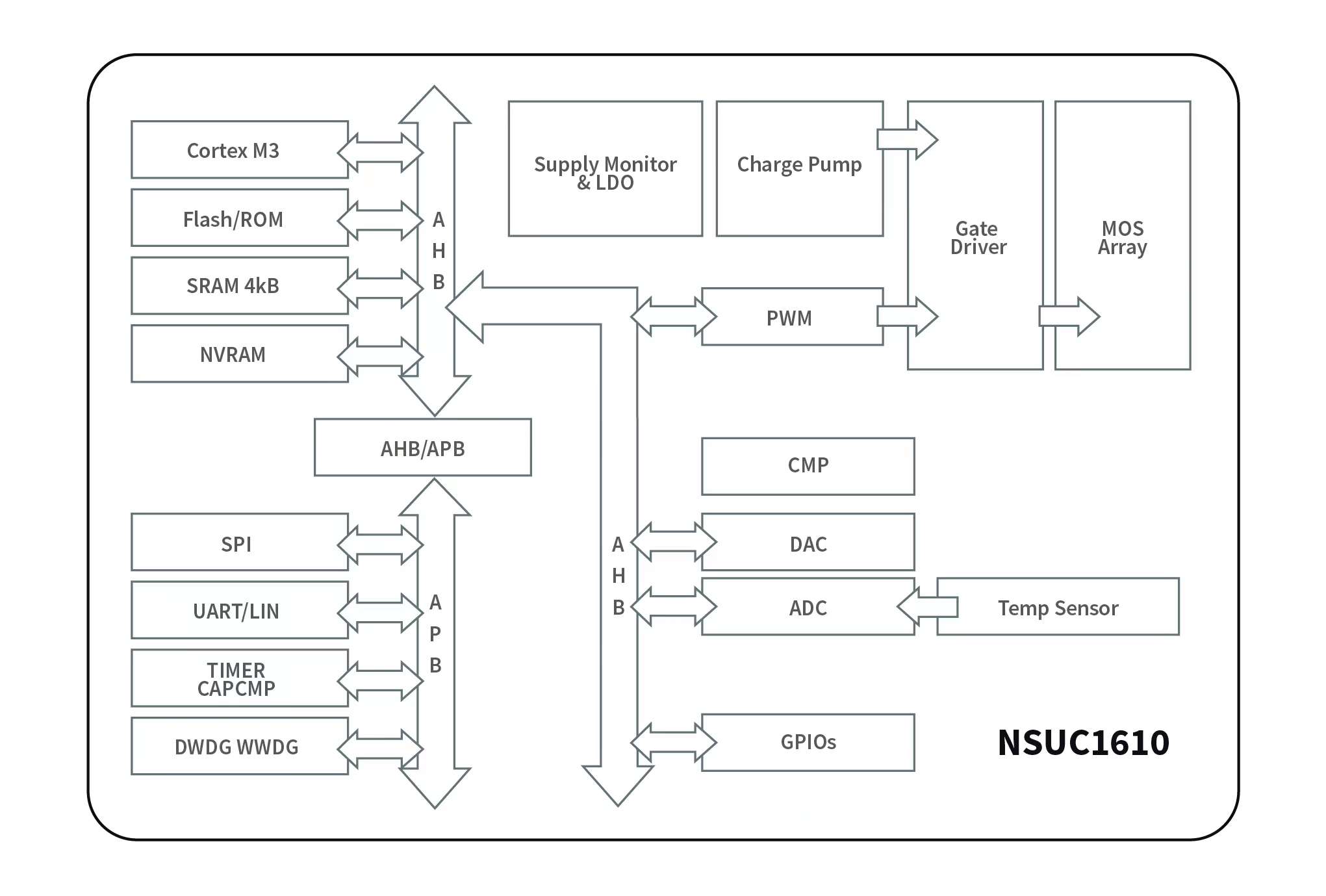
NSUC1610
NSUC1610 是一款集成了 4路半桥驱动器的专用处理器芯片,内置 Cortex-M3 内核和 LDO,可用于控制小功率电机。它可以驱动有刷直流电机、无刷直流电机、步进电机等,在汽车领域得到广泛应用。这颗芯片符合 AEC-Q100 标准,最高结温可达 175°C。体积小,集成度高。
NSUC1610 典型特性
-
ARM Cortex-M3 32-bit core
-
64 KBytes Flash
-
4 KBytes SRAM
-
512 Bytes EEPROM
-
32 MHz 高精度振荡器
-
35 KHz 低功耗低速时钟
-
操作电压:5.5V ~ 18V
-
一个 12-bit 高精度 ADC
-
两个 8-bit 限流 DAC
-
三个快速 BEMF 比较器
-
一个 SPI 通信接口(支持 3 线 / 4 线模式)
-
一个 UART 外设
-
LIN PHY 模块,支持 LIN2.2 通信
-
三个 16-bit 输入捕获模块
-
两个 16-bit 定时器
-
一个窗口看门狗
-
一个数字看门狗
-
四个半桥输出
-
四个增强型 PWM 输出
-
软件控制高边驱动器
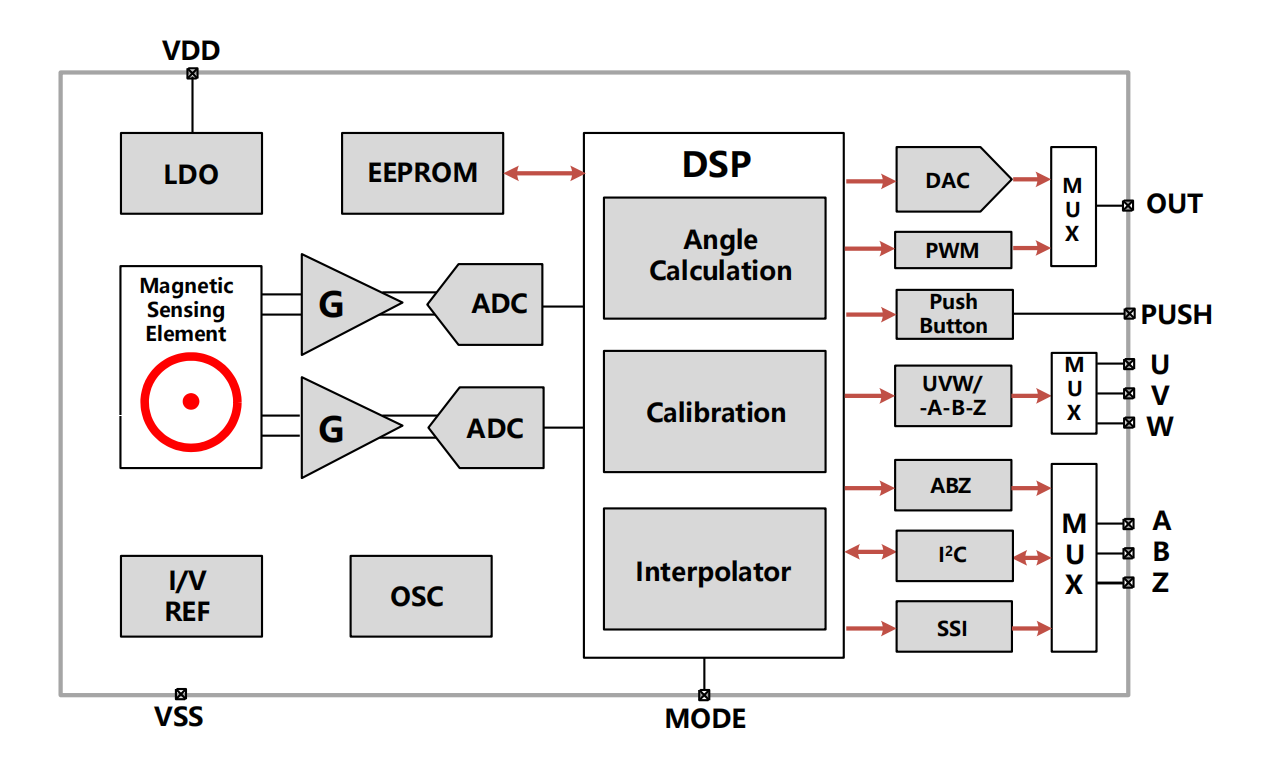
MT6701
MT6701是麦歌恩微电子推出的新一代基于差分水平霍尔磁感应原理的角度位置传感器芯片,基于霍尔技术,0360°绝对角度位置检测,输出1214位的绝对角度信息。该芯片内部包含了两对互成90°放置的差分霍尔惠斯通电桥,能够感应在芯片X-Y平面上旋转磁铁的Z轴磁场分量,经过内部电路处理之后,可通过标准I2C或SSI等接口获取到角度信息。此外 MT6701 内置 EEPROM 可用于设置不同的参数,还提供多种默认功能不同的型号可选。可应用于:
-
绝对角度位置传感器
-
闭环步进、BLDC控制
-
机器人关节控制
-
非接触旋钮、按钮
-
非接触电位计
MT6701 典型特征
-
基于霍尔技术,0~360°绝对角度位置检测
-
工作电压:3.3V ~ 5.0V(烧写时需保证 VDD > 4.5V)
-
内置 EEPROM
-
独立输出接口:I2C、SSI、ABZ、UVW、模拟电压、PWM 以及 Z 轴按压检测
-
支持最高转速:55,000 转/分钟
-
角度输出系统延时:<5 us
-
增量 ABZ 输出支持:1~1024 脉冲/圈,任意整数分辨率客户可编程
-
增量 UVW 输出支持:1~16 对极,任意整数对极客户可编程
-
优异的抗杂散磁场干扰能力
-
符合 RoHS 2011/65/EU
-
封装形式:SOP-8 和 QFN3x3-16L

(图片来源于网络)
联系我们
如有需求请联系霆宝科技销售团队,邮件至sales@teampo.com,或致电0755-83187999。