零基础做自动驾驶集成测试(仿真)
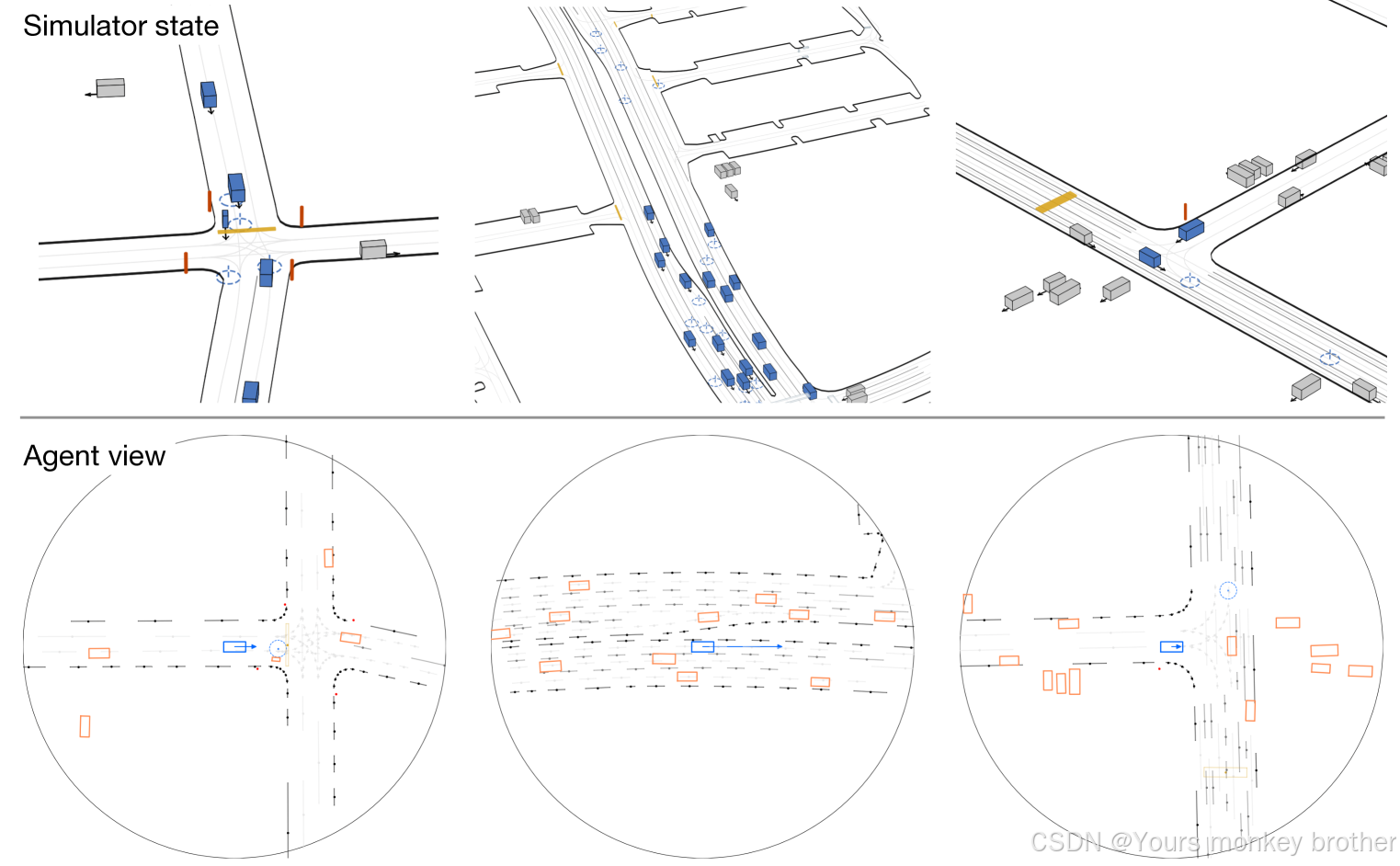
图 1:使用 GPUDrive 进行极快的多代理模拟。上图:GPUDrive 中 Waymo Open Motion Dataset 场景的鸟瞰图,方框表示受控智能体,圆圈表示其目标。底部:相应的代理视图,以一个代理为中心。可以根据用户的目标轻松配置观察。在这里,代理通过相对坐标框架提供场景视图。显示的是可配置半径(设置为 50 米)内的附近道路点以及场景中其他代理的相对位置。
这两个领域之间首选技术的差异部分是现实世界多智能体规划中两个截然不同、具有挑战性的组成部分的结果。首先,与零和博弈不同,有必要采用与人相容的策略,没有数据就很难识别。其次,使用现有模拟器很难生成多智能体学习算法所需的数十亿个样本。前一个挑战对于多智能体学习来说很困难,因为算法应该追求的没有明确的均衡概念。后一个问题对模拟器来说是一个挑战,因为很难以适当的高速率模拟隐含的多智能体环境。
为了应对这些挑战并解锁多智能体学习作为生成有能力的自动驾驶规划器的工具,我们推出了 GPUDrive。GPUDrive 是一个模拟器,旨在将真实世界的驾驶数据与模拟速度混合,从而能够将样本效率低但有效的 RL 算法应用于自主规划器的设计。GPUDrive 在消费级和数据中心级 GPU 上都以每秒超过 100 万步的速度运行,并且具有足够轻的内存占用,可以支持数百到数千个同步世界(环境),每个世界有数百个代理。GPUDrive 支持模拟各种传感器模态,从 LIDAR 到类似人类的视锥,使 GPUDrive 可用于研究不同传感器类型对合成代理特性的影响。最后,GPUDrive 从现有的自动驾驶数据集中获取驱动日志和地图,从而能够将模仿学习工具与强化学习算法混合在一起。这使得研究自动驾驶汽车的开发以及人类驾驶、骑行和步行行为模型的学习成为可能。