OpenGL学习笔记(延迟着色法、SSAO)
目录
- 延迟着色法
- G缓冲
- 延迟光照处理阶段
- 结合延迟渲染与正向渲染
- 更多的光源
- 屏幕空间环境光遮蔽 SSAO
GitHub主页:https://github.com/sdpyy1
OpenGL学习仓库:https://github.com/sdpyy1/CppLearn/tree/main/OpenGLtree/main/OpenGL):https://github.com/sdpyy1/CppLearn/tree/main/OpenGL
延迟着色法
我们现在一直使用的光照方式叫做正向渲染(Forward Rendering)或者正向着色法(Forward Shading)
最简单理解就是片段着色器要完成所有物体的所有可见部分的光照计算,然而大部分着色器的输出都会被之后的输出覆盖。
延迟着色法(Deferred Shading),或者说是延迟渲染(Deferred Rendering),为了解决上述问题而诞生了
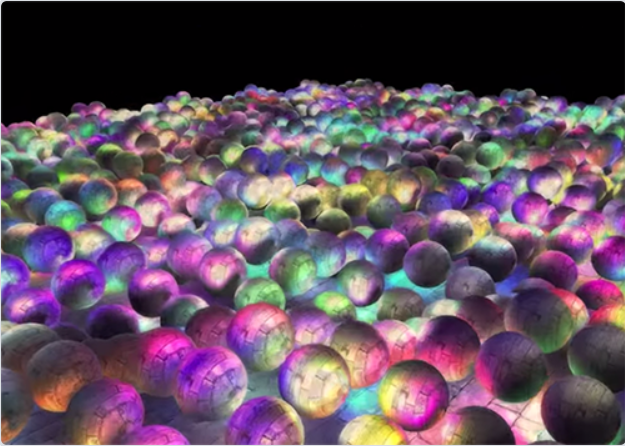
下图使用了1874个点光源,这对于正向渲染几乎是不可能的
 延迟着色法基于我们延迟(Defer)或推迟(Postpone)大部分计算量非常大的渲染(像是光照)到后期进行处理的想法。
延迟着色法基于我们延迟(Defer)或推迟(Postpone)大部分计算量非常大的渲染(像是光照)到后期进行处理的想法。
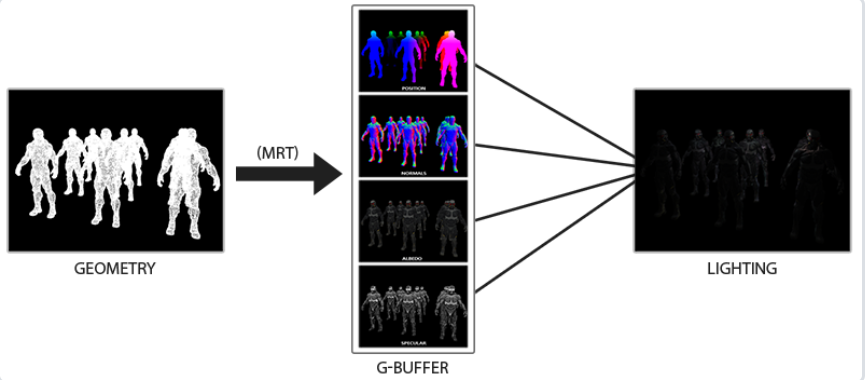
它包含两个处理阶段:
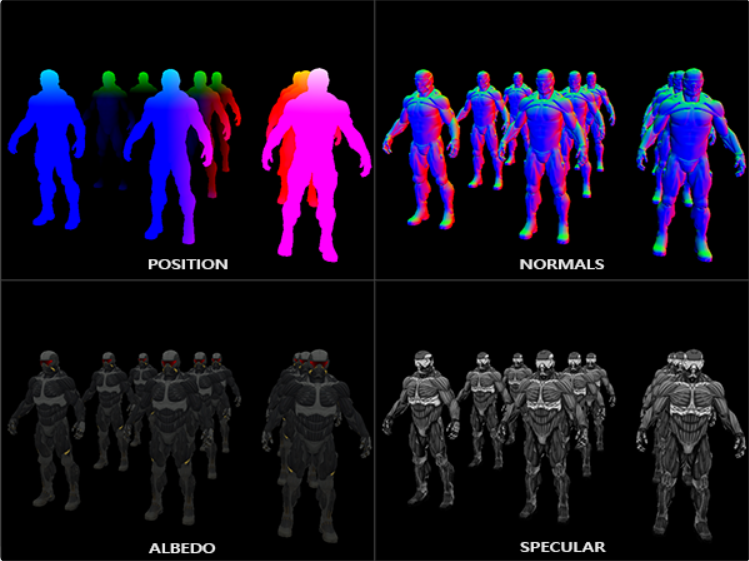
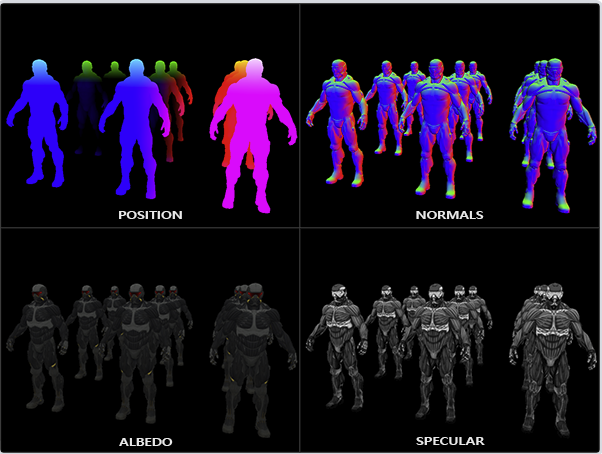
- 几何处理:渲染场景一次,获取各种几何信息,并存储在一系列叫G缓冲的纹理中。比如位置、颜色、法向量、镜面值
- 光照处理阶段:利用G缓冲的数据来计算光照
这样做一些被覆盖的物体就不会计算光照
G缓冲
对于每一个片段我们需要储存的数据有:一个位置向量、一个法向量,一个颜色向量,一个镜面强度值。
创建这样一个FBO
GLuint gBuffer;
glGenFramebuffers(1, &gBuffer);
glBindFramebuffer(GL_FRAMEBUFFER, gBuffer);
GLuint gPosition, gNormal, gColorSpec;// - 位置颜色缓冲
glGenTextures(1, &gPosition);
glBindTexture(GL_TEXTURE_2D, gPosition);
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB16F, SCR_WIDTH, SCR_HEIGHT, 0, GL_RGB, GL_FLOAT, NULL);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST);
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_COLOR_ATTACHMENT0, GL_TEXTURE_2D, gPosition, 0// - 法线颜色缓冲
glGenTextures(1, &gNormal);
glBindTexture(GL_TEXTURE_2D, gNormal);
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB16F, SCR_WIDTH, SCR_HEIGHT, 0, GL_RGB, GL_FLOAT, NULL);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST);
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_COLOR_ATTACHMENT1, GL_TEXTURE_2D, gNormal, 0);// - 颜色 + 镜面颜色缓冲
glGenTextures(1, &gAlbedoSpec);
glBindTexture(GL_TEXTURE_2D, gAlbedoSpec);
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, SCR_WIDTH, SCR_HEIGHT, 0, GL_RGBA, GL_FLOAT, NULL);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST);
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_COLOR_ATTACHMENT2, GL_TEXTURE_2D, gAlbedoSpec, 0);// - 告诉OpenGL我们将要使用(帧缓冲的)哪种颜色附件来进行渲染
GLuint attachments[3] = { GL_COLOR_ATTACHMENT0, GL_COLOR_ATTACHMENT1, GL_COLOR_ATTACHMENT2 };
glDrawBuffers(3, attachments);// 之后同样添加渲染缓冲对象(Render Buffer Object)为深度缓冲(Depth Buffer),并检查完整性
[...]
在顶点着色器中写入缓冲,这里的layout是为了指明使用的是哪一个颜色缓冲
#version 330 core
layout (location = 0) out vec3 gPosition;
layout (location = 1) out vec3 gNormal;
layout (location = 2) out vec4 gAlbedoSpec;in vec2 TexCoords;
in vec3 FragPos;
in vec3 Normal;uniform sampler2D texture_diffuse1;
uniform sampler2D texture_specular1;void main()
{ // 存储第一个G缓冲纹理中的片段位置向量gPosition = FragPos;// 同样存储对每个逐片段法线到G缓冲中gNormal = normalize(Normal);// 和漫反射对每个逐片段颜色gAlbedoSpec.rgb = texture(texture_diffuse1, TexCoords).rgb;// 存储镜面强度到gAlbedoSpec的alpha分量gAlbedoSpec.a = texture(texture_specular1, TexCoords).r;
}
延迟光照处理阶段
由于所有的G缓冲纹理都代表的是最终变换的片段值,我们只需要对每一个像素执行一次昂贵的光照运算就行了。这使得延迟光照非常高效,特别是在需要调用大量重型片段着色器的复杂场景中。
#version 330 core
out vec4 FragColor;
in vec2 TexCoords;uniform sampler2D gPosition;
uniform sampler2D gNormal;
uniform sampler2D gAlbedoSpec;struct Light {vec3 Position;vec3 Color;
};
const int NR_LIGHTS = 32;
uniform Light lights[NR_LIGHTS];
uniform vec3 viewPos;void main()
{ // 从G缓冲中获取数据vec3 FragPos = texture(gPosition, TexCoords).rgb;vec3 Normal = texture(gNormal, TexCoords).rgb;vec3 Albedo = texture(gAlbedoSpec, TexCoords).rgb;float Specular = texture(gAlbedoSpec, TexCoords).a;// 然后和往常一样地计算光照vec3 lighting = Albedo * 0.1; // 硬编码环境光照分量vec3 viewDir = normalize(viewPos - FragPos);for(int i = 0; i < NR_LIGHTS; ++i){// 漫反射vec3 lightDir = normalize(lights[i].Position - FragPos);vec3 diffuse = max(dot(Normal, lightDir), 0.0) * Albedo * lights[i].Color;lighting += diffuse;}FragColor = vec4(lighting, 1.0);
}
结合延迟渲染与正向渲染
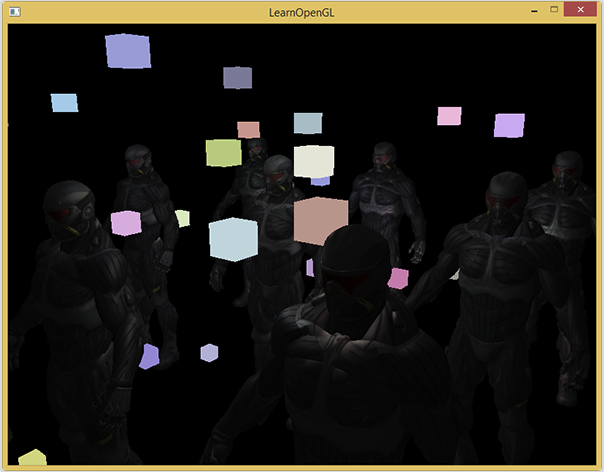
延迟渲染因为只保存了最前边的数据,就没办法进行混合了(需要玻璃背后的颜色进行mix)。为了展示这是如何工作的,我们将会使用正向渲染器渲染光源为一个小立方体,因为光照立方体会需要一个特殊的着色器(会输出一个光照颜色)。
在延迟渲染之后渲染所有立方体,所有的立方体就渲染到了最前边

我们需要做的就是首先复制出在几何渲染阶段中储存的深度信息,并输出到默认的帧缓冲的深度缓冲,
glBindFramebuffer(GL_READ_FRAMEBUFFER, gBuffer);
glBindFramebuffer(GL_DRAW_FRAMEBUFFER, 0); // 写入到默认帧缓冲
glBlitFramebuffer(0, 0, SCR_WIDTH, SCR_HEIGHT, 0, 0, SCR_WIDTH, SCR_HEIGHT, GL_DEPTH_BUFFER_BIT, GL_NEAREST
);
glBindFramebuffer(GL_FRAMEBUFFER, 0);
// 现在像之前一样渲染光立方体
[...]
在这里我们复制整个读帧缓冲的深度缓冲信息到默认帧缓冲的深度缓冲,对于颜色缓冲和模板缓冲我们也可以这样处理。现在如果我们接下来再渲染光立方体,场景里的几何体将会看起来很真实了,而不只是简单地粘贴立方体到2D方形之上:
现在渲染正方体时会考虑目前像素的深度值,所以会有部分像素无法通过深度测试,所以效果比较真实
更多的光源
真正让大量光源成为可能的是我们能够对延迟渲染管线引用的一个非常棒的优化:光体积(Light Volumes)
由于大部分光源都使用了某种形式的衰减(Attenuation),我们可以用它来计算光源能够到达的半径。我们接下来只需要对那些在一个或多个光体积内的片段进行繁重的光照运算就行了。这可以给我们省下来很可观的计算量,因为我们现在只在需要的情况下计算光照。
在渲染光源时先考虑半径来丢弃一些光源的贡献
for(int i = 0; i < NR_LIGHTS; ++i){// 计算光源和该片段间距离float distance = length(lights[i].Position - FragPos);if(distance < lights[i].Radius){// 执行大开销光照[...]}}
GPU和GLSL并不擅长优化循环和分支。这一缺陷的原因是GPU中着色器的运行是高度并行的,大部分的架构要求对于一个大的线程集合,GPU需要对它运行完全一样的着色器代码从而获得高效率。这通常意味着一个着色器运行时总是执行一个if语句所有的分支从而保证着色器运行都是一样的,这使得我们之前的半径检测优化完全变得无用,我们仍然在对所有光源计算光照!
使用光体积更好的方法是渲染一个实际的球体,并根据光体积的半径缩放。这些球的中心放置在光源的位置,由于它是根据光体积半径缩放的,这个球体正好覆盖了光的可视体积。这就是我们的技巧:我们使用大体相同的延迟片段着色器来渲染球体。因为球体产生了完全匹配于受影响像素的着色器调用,我们只渲染了受影响的像素而跳过其它的像素。下面这幅图展示了这一技巧: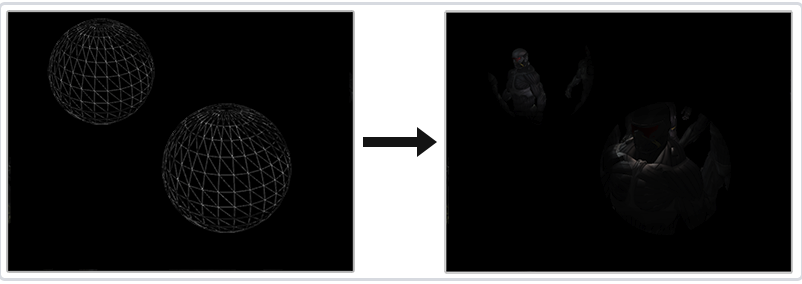
屏幕空间环境光遮蔽 SSAO
在现实中,光线会以任意方向散射,它的强度是会一直改变的,所以间接被照到的那部分场景也应该有变化的强度,而不是一成不变的环境光。环境光遮蔽(Anbient Occlusion)是其中一种解决方案。
它的原理是通过将褶皱、孔洞和非常靠近的墙面变暗的方法近似模拟出间接光照。这些区域很大程度上是被周围的几何体遮蔽的,光线会很难流失,所以这些地方看起来会更暗一些。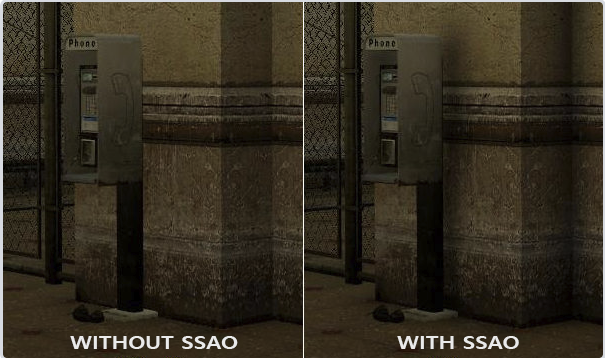
环境光遮蔽这一技术会带来很大的性能开销,因为它还需要考虑周围的几何体。我们可以对空间中每一点发射大量光线来确定其遮蔽量,但是这在实时运算中会很快变成大问题。
孤岛危机中有了新的技术叫屏幕空间环境光遮蔽(Screen-space Ambient Occlusion, SSAO)技术。这一技术使用了屏幕空间场景的深度而不是真实的几何体数据来确定遮蔽量。这一做法相对于真正的环境光遮蔽不但速度快,而且还能获得很好的效果,使得它成为近似实时环境光遮蔽的标准。
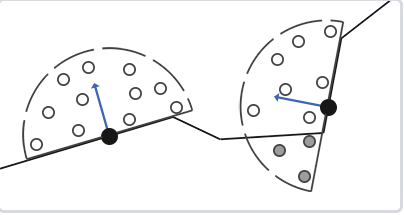
SSAO背后的原理:每一个片段,我们都会根据周边深度值计算一个遮蔽因子(Occlusion Factor)。这个遮蔽因子之后会被用来减少或者抵消片段的环境光照分量。遮蔽因子是通过采集片段周围球型核心(Kernel)的多个深度样本,并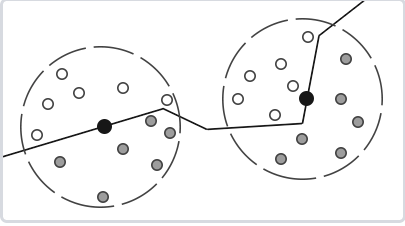
灰色样本就是深度高于片段深度的样本,灰色越多,片段获得的环境光照也就越少。
渲染效果的质量和精度与我们采样样本的数量有直接关系
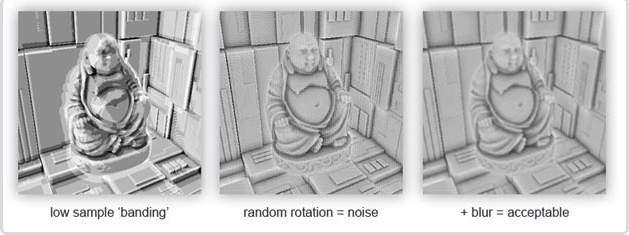
Crytek公司开发的SSAO技术会产生一种特殊的视觉风格。因为使用的采样核心是一个球体,它导致平整的墙面也会显得灰蒙蒙的,因为核心中一半的样本都会在墙这个几何体上。下面这幅图展示了孤岛危机的SSAO,它清晰地展示了这种灰蒙蒙的感觉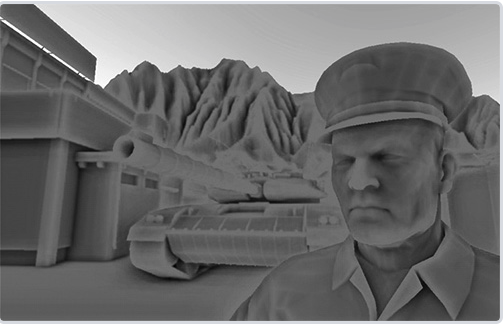
由于这个原因,我们将不会使用球体的采样核心,而使用一个沿着表面法向量的半球体采样核心。
接着上面的延迟渲染,在g缓冲中额外添加一层表示深度的缓冲,注意要先转为线性
// 储存线性深度到gPositionDepth的alpha分量gPositionDepth.a = LinearizeDepth(gl_FragCoord.z);
紧接着需要沿着表面法线方向生成样本
std::uniform_real_distribution<GLfloat> randomFloats(0.0, 1.0); // 随机浮点数,范围0.0 - 1.0
std::default_random_engine generator;
std::vector<glm::vec3> ssaoKernel;
for (GLuint i = 0; i < 64; ++i)
{glm::vec3 sample(randomFloats(generator) * 2.0 - 1.0, randomFloats(generator) * 2.0 - 1.0, randomFloats(generator));sample = glm::normalize(sample);sample *= randomFloats(generator);GLfloat scale = GLfloat(i) / 64.0; ssaoKernel.push_back(sample);
}
我们在切线空间中以-1.0到1.0为范围变换x和y方向,并以0.0和1.0为范围变换样本的z方向(如果以-1.0到1.0为范围,取样核心就变成球型了)。由于采样核心将会沿着表面法线对齐,所得的样本矢量将会在半球里。
每个核心样本将会被用来偏移观察空间片段位置从而采样周围的几何体。我们在教程开始的时候看到,如果没有变化采样核心,我们将需要大量的样本来获得真实的结果。通过引入一个随机的转动到采样核心中,我们可以很大程度上减少这一数量。
之后把这些东西放在SSAO着色器中执行SSAO算法
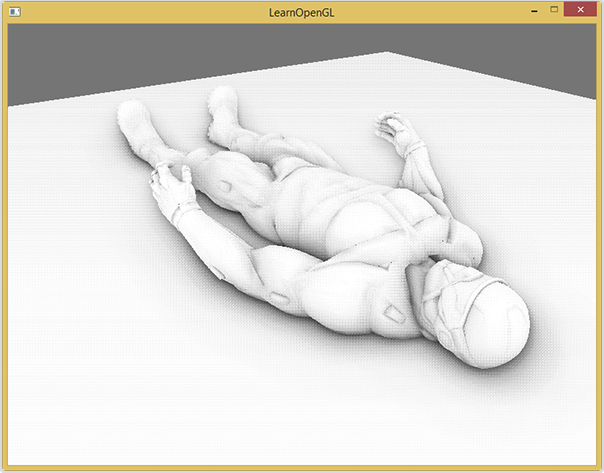
现在的效果仍然看起来不是很完美,由于重复的噪声纹理再图中清晰可见。为了创建一个光滑的环境遮蔽结果,我们需要模糊环境遮蔽纹理。
#version 330 core
in vec2 TexCoords;
out float fragColor;uniform sampler2D ssaoInput;void main() {vec2 texelSize = 1.0 / vec2(textureSize(ssaoInput, 0));float result = 0.0;for (int x = -2; x < 2; ++x) {for (int y = -2; y < 2; ++y) {vec2 offset = vec2(float(x), float(y)) * texelSize;result += texture(ssaoInput, TexCoords + offset).r;}}fragColor = result / (4.0 * 4.0);
}
最近几篇OpenGL学习笔记更多用于了解技术,不做实现,更多实践放在Games202中~