机器人“跨协议对话”秘籍:EtherNet IP转PROFINET网关应用实录
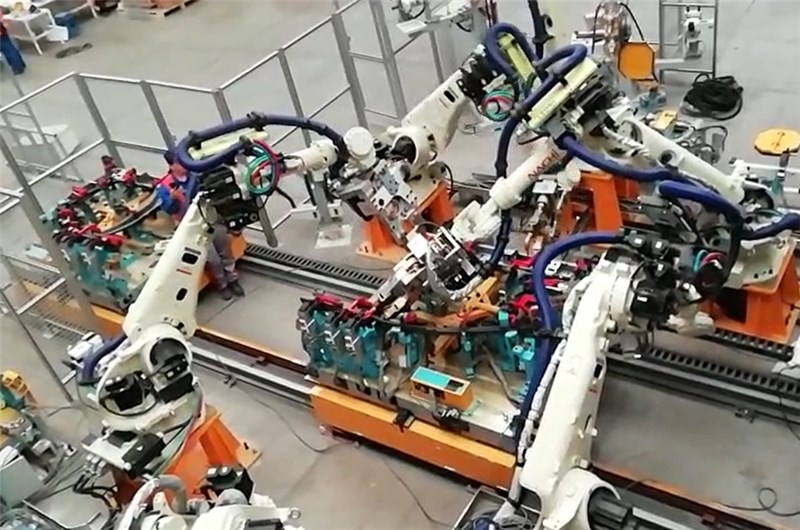
近期,我们工厂在进行自动化生产线升级改造时,引进了一批全新的机器人手臂设备。这批机器人采用EtherNet/IP通信协议,而生产线上原有的终端控制器则使用PROFINET协议。由于两种协议在通信标准和数据格式上存在差异,导致机器人手臂无法与现场的终端控制器直接通信,设备之间的数据交换无法顺利进行,严重影响了生产线的整体效率。
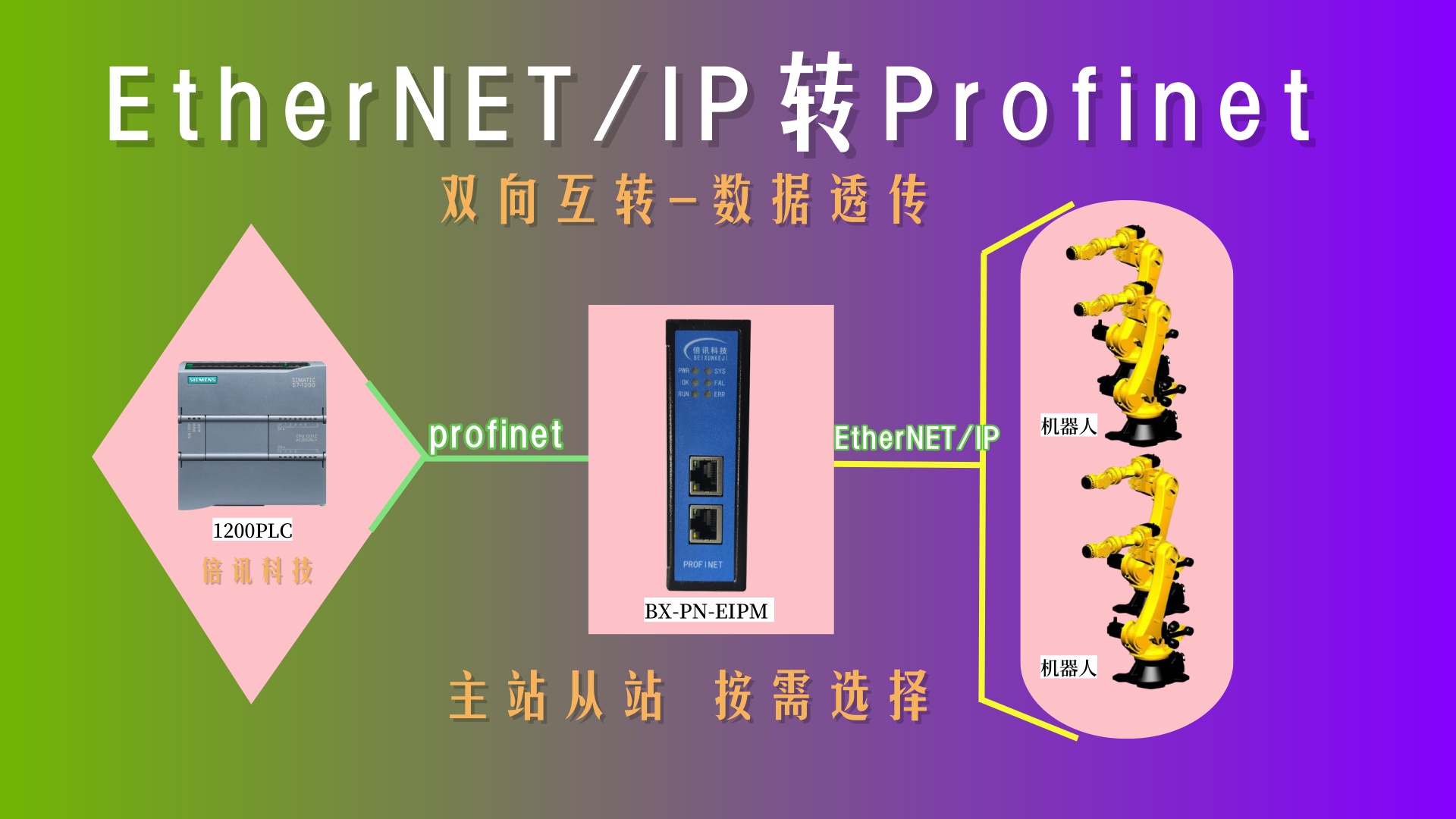
针对这一问题,我们工程师团队经过详细分析和现场测试,决定采用EtherNet/IP转PROFINET通信协议网关(倍讯BX-606-EIP)来实现快速、稳定的协议转换。
EtherNet/IP协议设备分为主站(Scanner)和从站(Adapter)两种角色,明确区分这两种角色对网关选型至关重要:
EtherNet/IP主站(Scanner)通常主动发起通信请求,进行数据的收集与控制;而从站(Adapter)则被动响应主站的请求,提供数据或接受指令。在我们项目中,机器人手臂作为EtherNet/IP的从站设备,需要接受PROFINET主站(倍讯BX-606-EIP)终端控制器的指令。因此,我们选择了一款支持EtherNet/IP从站模式的网关设备(倍讯BX-606-EIP),该协议网关具备双端口设计,一端连接机器人EtherNet/IP网络,另一端连接终端控制器的PROFINET网络。只需对网关进行简单的参数配置,即可实现两种不同协议之间的数据实时转换和传输。

实际应用过程中,我们将网关的EtherNet/IP端口作为主站角色连接机器人手臂,从机器人处主动读取数据并发送指令;另一端的PROFINET接口作为从站角色,连接终端控制器,将网关接入网络,配置好IP地址及协议参数,随后定义好数据映射关系,接受控制器主动发送的指令及数据请求。通过简单的参数配置和数据映射,我们快速实现了两种协议设备之间的数据交互。整个部署过程无需对现有设备做任何硬件改动,极大节省了现场施工和调试的时间。
网关上线运行以来,数据传输稳定可靠,响应速度迅速,完全满足生产线实时控制需求,有效解决了设备通信不兼容问题。通过该网关的及时引入,我们避免了大规模设备改造带来的高昂成本和生产延误风险,显著提高了设备协作效率和生产线整体性能,获得了生产部门的一致认可。