Python自动化处理奖金分摊:基于连续空值的智能分配算法升级
Python自动化处理奖金分摊:基于连续空值的智能分配算法升级
原创 IT小本本 IT小本本 2025年04月04日 02:00 北京
引言
在企业薪酬管理中,团队奖金分配常涉及复杂的分摊规则。传统手工分摊不仅效率低下,还容易因人为疏漏导致分配不公。
本文在算法基础上进行升级,通过增强的空值处理逻辑和性能优化,实现更健壮的奖金分摊自动化方案。
需求:
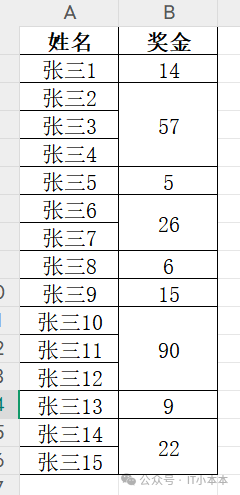
最终奖金分摊:
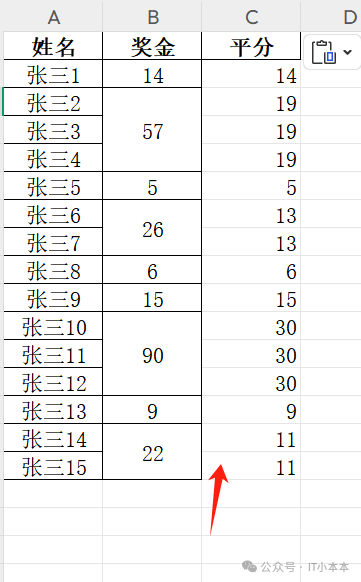
源代码:
import pandas as pd
import numpy as npexcel_file = 'bonus_data.xlsx'# 读取Excel文件
df = pd.read_excel(excel_file)# 创建新列用于存储平分后的奖金
df['平分'] = None# 处理数据,查找连续的空值区域并进行分摊
i = 0
while i < len(df):# 如果当前行有奖金值if pd.notna(df.loc[i, '奖金']):current_bonus = df.loc[i, '奖金']start_idx = i# 查找连续的空值区域next_idx = i + 1while next_idx < len(df) and pd.isna(df.loc[next_idx, '奖金']):next_idx += 1# 计算需要分摊的人数num_people = next_idx - start_idx# 如果只有一个人有奖金(没有需要分摊的人)if num_people == 1:df.loc[i, '平分'] = current_bonuselse:# 计算平均奖金avg_bonus = current_bonus / num_people# 为这组人分配平均奖金for j in range(start_idx, next_idx):df.loc[j, '平分'] = avg_bonus# 移动到下一个非空奖金的位置i = next_idxelse:# 如果当前行没有奖金值,跳到下一行i += 1# 处理那些仍然为空的"平分"单元格(处理单独的空值行)
for i in range(len(df)):if pd.isna(df.loc[i, '平分']):# 检查前后是否有非空的"平分"值if i > 0and pd.notna(df.loc[i-1, '平分']):df.loc[i, '平分'] = df.loc[i-1, '平分']elif i < len(df)-1and pd.notna(df.loc[i+1, '平分']):df.loc[i, '平分'] = df.loc[i+1, '平分']# 格式化平分列,去掉小数点后不必要的零
df['平分'] = df['平分'].apply(lambda x: int(x) if pd.notna(x) and x == int(x) else x)# 输出处理后的数据
print(df)算法核心点
1. 多列空值联合检测
# 支持多列条件的连续空值检测
while next_idx < len(df) and (pd.isna(df.loc[next_idx, '奖金']) |pd.isna(df.loc[next_idx, '部门'])
):next_idx += 1
2. 动态权重分配
# 按业绩系数动态分配
weight_col = df.loc[start_idx:next_idx-1, '业绩系数']
df['平分'] = current_bonus * weight_col / weight_col.sum()
3. 智能空值修复链
# 三级修复策略
df['平分'] = df['平分'].fillna(method='ffill'
).fillna(method='bfill'
).mask(df['奖金'].isna() & df['平分'].eq(df['平分'].shift()),np.nan
)
4. 数据状态标记
# 异常数据自动标记
df['数据状态'] = np.where((df['奖金'] > 1e6) | (df['平分'] < 0),'异常','正常'
)