PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕
视频讲解:
PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕
代码仓库:https://github.com/LitchiCheng/mujoco-learning
今天分享PyRoboPlan库,比之前的方式优点在于,这个库考虑了机械臂的关节限位和碰撞,也就是生成出来的关节位置不会存在碰撞问题
官方仓库:https://github.com/sea-bass/pyroboplan
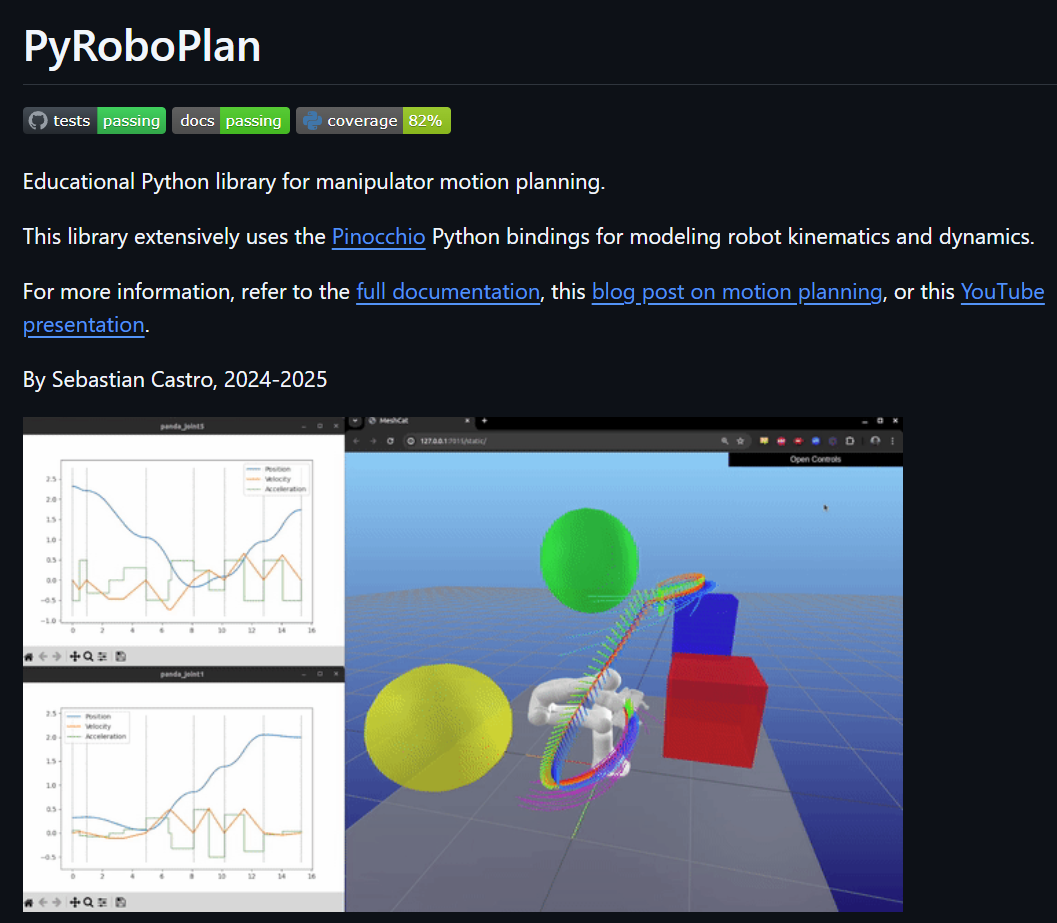
pyroboplan基于pinocchio,故先安装pinocchio再安装pyroboplan
pip3 install pyroboplan参考仓库中的 https://github.com/sea-bass/pyroboplan/blob/main/examples/differential_ik.py
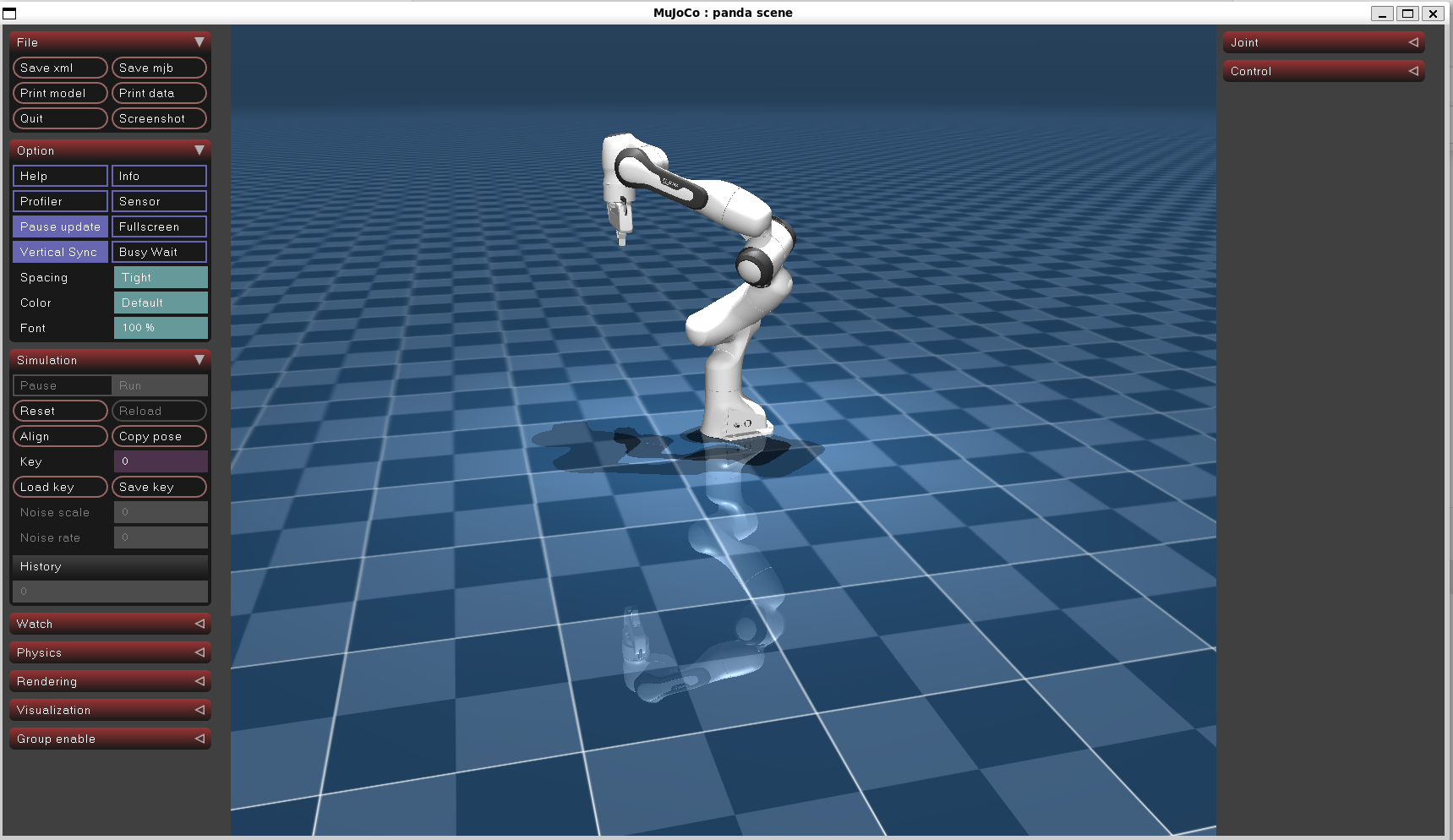
使用pyroboplan中的ik来进行panda机械臂的末端逆解测试
import mujoco_viewer
import mujoco,time
import numpy as np
import pinocchio
from pyroboplan.core.utils import (
get_random_collision_free_state,
get_random_collision_free_transform,
)
from pyroboplan.ik.differential_ik import DifferentialIk, DifferentialIkOptions
from pyroboplan.ik.nullspace_components import (
joint_limit_nullspace_component,
collision_avoidance_nullspace_component,
)
from pyroboplan.models.panda import (
load_models,
add_self_collisions,
add_object_collisions,
)
class Test(mujoco_viewer.CustomViewer):
def __init__(self, path):
super().__init__(path, 3, azimuth=-45, elevation=-30)
self.path = path
def runBefore(self):
# Create models and data
self.model_roboplan, self.collision_model, visual_model = load_models()
add_self_collisions(self.model_roboplan, self.collision_model)
add_object_collisions(self.model_roboplan, self.collision_model, visual_model, inflation_radius=0.1)
data = self.model_roboplan.createData()
collision_data = self.collision_model.createData()
self.target_frame = "panda_hand"
ignore_joint_indices = [
self.model_roboplan.getJointId("panda_finger_joint1") - 1,
self.model_roboplan.getJointId("panda_finger_joint2") - 1,
]
np.set_printoptions(precision=3)
# Set up the IK solver
options = DifferentialIkOptions(
max_iters=200,
max_retries=10,
damping=0.0001,
min_step_size=0.05,
max_step_size=0.1,
ignore_joint_indices=ignore_joint_indices,
rng_seed=None,
)
self.ik = DifferentialIk(
self.model_roboplan,
data=data,
collision_model=self.collision_model,
options=options,
visualizer=None,
)
self.nullspace_components = [
lambda model_roboplan, q: collision_avoidance_nullspace_component(
model_roboplan,
data,
self.collision_model,
collision_data,
q,
gain=1.0,
dist_padding=0.05,
),
lambda model_roboplan, q: joint_limit_nullspace_component(
model_roboplan, q, gain=0.1, padding=0.025
),
]
self.x = 0.29
self.init_state = self.data.qpos.copy()
def runFunc(self):
# Solve IK several times and print the results
# for _ in range(10):
self.init_state = get_random_collision_free_state(self.model_roboplan, self.collision_model)
# target_tform = get_random_collision_free_transform(
# self.model_roboplan,
# self.collision_model,
# self.target_frame,
# joint_padding=0.05,
# )
theta = np.pi
rotation_matrix = np.array([
[1, 0, 0],
[0, np.cos(theta), -np.sin(theta)],
[0, np.sin(theta), np.cos(theta)]
])
# quat = [0.29, 0.79, -0.50, 0.13]
# rotation_matrix = pinocchio.Quaternion(*quat).matrix()
target_tform = pinocchio.SE3(rotation_matrix, np.array([self.x, -0.0, 0.69]))
# print(target_tform)
q_sol = self.ik.solve(
self.target_frame,
target_tform,
init_state=self.init_state,
nullspace_components=self.nullspace_components,
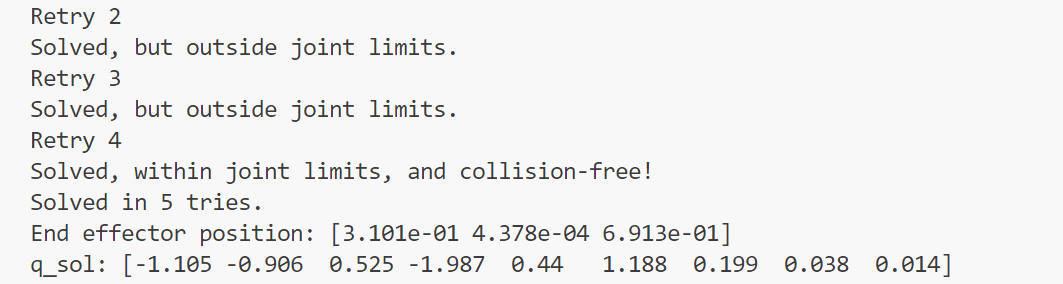
verbose=True,
)
# self.init_state = self.data.qpos.copy()
if q_sol is not None:
self.end_effector_id = mujoco.mj_name2id(self.model, mujoco.mjtObj.mjOBJ_BODY, 'hand')
print(f"End effector position: {self.data.body(self.end_effector_id).xpos}")
print(f"q_sol: {q_sol}")
self.data.qpos[:7] = q_sol[:7]
self.x += 0.001
else:
print("No solution found.")
time.sleep(0.01)
if __name__ == "__main__":
test = Test("/home/dar/MuJoCoBin/mujoco_menagerie/franka_emika_panda/scene.xml")
test.run_loop()