Matlab 非线性阻尼四分之一车体被动和模糊pid控制悬架对比
1、内容简介
Matlab 192-非线性阻尼四分之一车体被动和模糊pid控制悬架对比
可以交流、咨询、答疑
2、内容说明
略
汽车车辆悬架系统的核心元件主要有控制器、导向机构、弹性元件以及减
震器等,该系统是汽车最重要的结构系统之一,主流车辆悬架大致有被动悬架、
主动悬架、半主动悬架三类。其中被动悬架由于系统各元件的特性无法灵活调
整,只能够被动地吸收缓冲能量,所以在应用时会有一些不足之处。主动悬架
可以兼顾车辆驾驶的平顺性与操纵的稳定性,当车辆总承载质量发生变化或道
路条件等发内外因生变化时,主动悬架可以灵活地调整自身参数,使车辆底盘
的离地高度保持在安全合理的高度、提高附着性能、改善操纵性,同时还可以
减轻轮胎磨损。但是,主动悬架也有一些缺点,如整体结构复杂、控制的实现
对于硬件要求较等,这些直接导致了整车的高造价与高自重。而半主动悬架不
需要改变悬架刚度而只用改变悬架阻尼,就能很好地实现对悬架性能的调节,
并且整个结构相对简单,成本也可以大大降低,因此阻尼可调半主动悬架有着
广泛的应用前景,从上世纪七十年代 Crosby 等人首次提出这个概念后,便成为
各国汽车工业技术研究的热点之一。
本课题研究内容为:研究设计阻尼可调车辆半主动悬架控制器,并借助计
算机仿真软件进行仿真研究。
第一、二章主要阐述了汽车悬架的种类、性能特点以及半主动悬架国内外
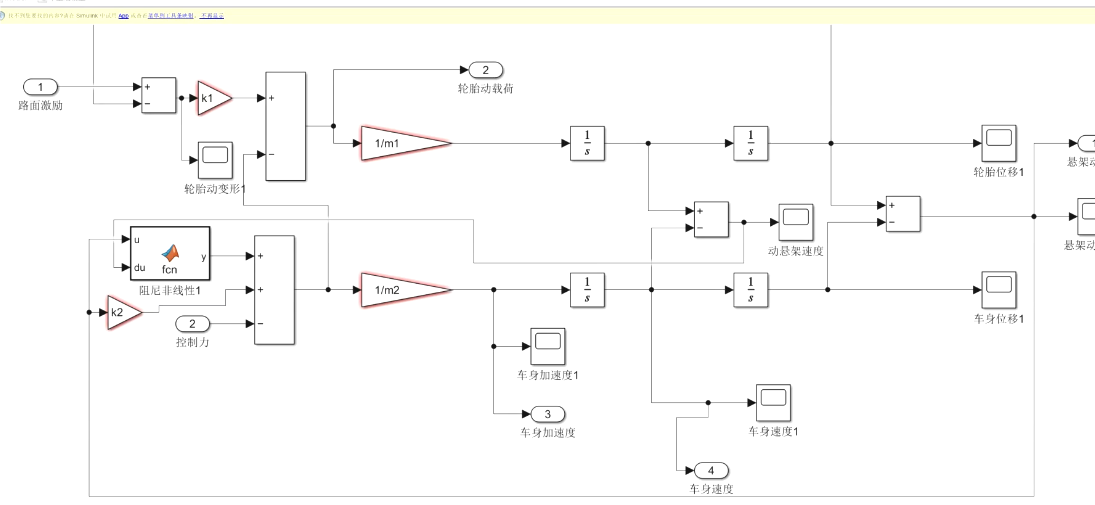
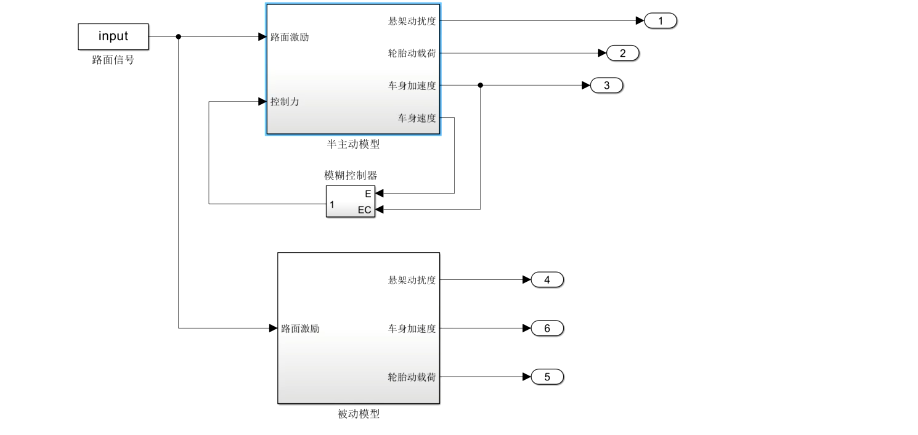
研究现状。第三章综述了主流的控制理论与控制方式,并建立了四分之一车辆
半主动悬架数学模型,参考于已有研究分析选择模糊控制作为半主动悬架系统
的控制策略。第四章主要是悬架控制器的设计,选定了步进电动机与 DSP 主控
芯片等主要电气元件,并完成了控制器主电路板及辅助电路板的设计。最后根
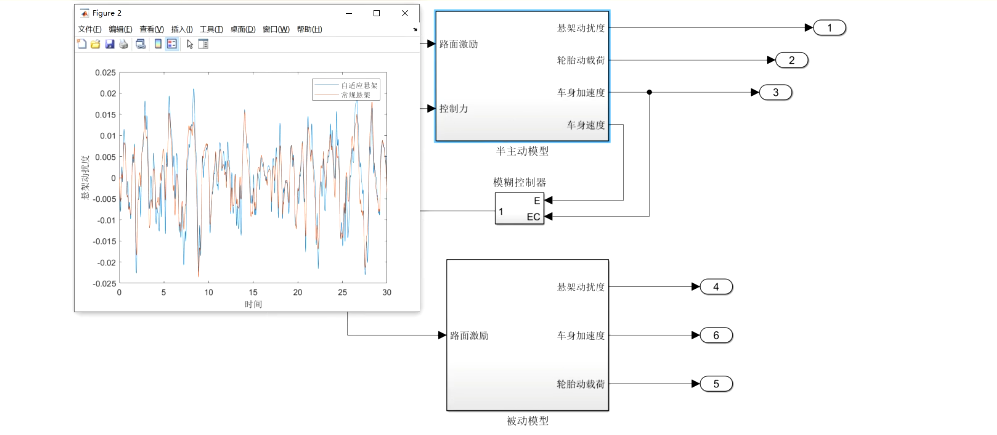
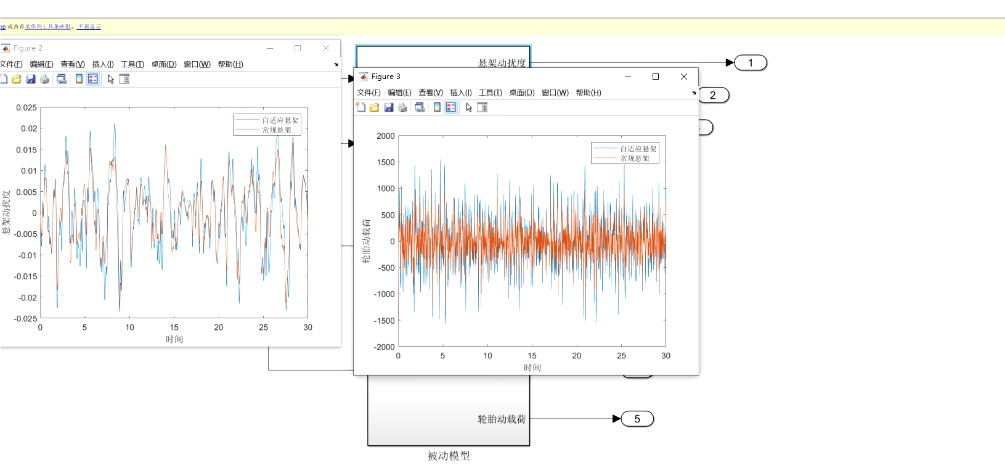
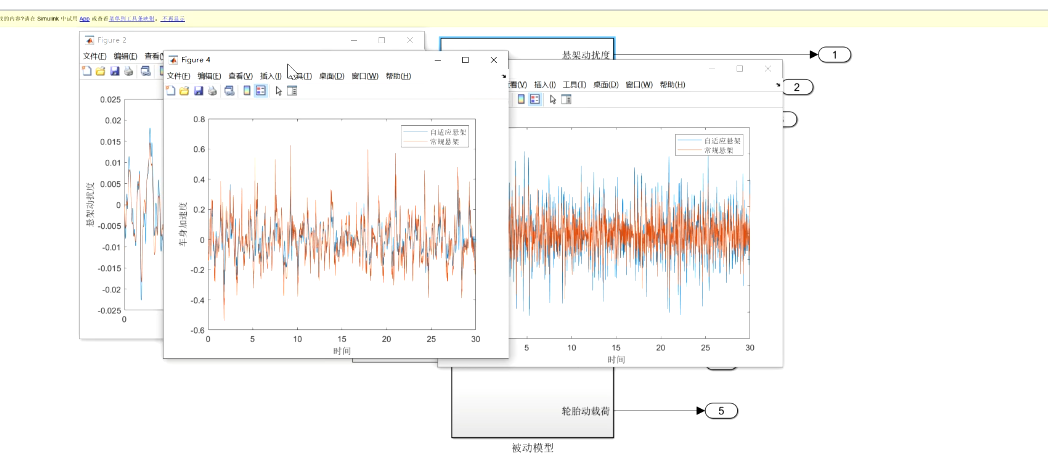
据建立的四分之一半主动悬架模型,输入路面信号,基于 Matlab+Simulink 完
成了计算机仿真研究,继而通过对比仿真结果得出,阻尼可调车辆悬架系统相
比之下减震性能更优的研究结论。
关键词:
半主动悬架;模糊控制;计算机仿真;车辆;减震器;
3、仿真分析
略
4、参考论文
略