PIXOR:基于LiDAR的3D检测模型解析
目录
1、前言
2、PIXOR介绍
2.1. 什么是PIXOR?
2.2. PIXOR如何工作?
3、表现和应用
3.1、PIXOR的性能表现
3.2、PIXOR的应用场景
3.3、PIXOR的局限性与挑战
4. PIXOR的未来展望
5. 结语
1、前言
自动驾驶技术正以前所未有的速度发展,而PIXOR(Oriented 3D Object Detection from PIXel-wise neural network predictions)作为一种基于LiDAR的3D目标检测模型,曾在2018年引起广泛关注。本文将深入解析PIXOR的工作原理、性能表现及其在自动驾驶中的应用,同时直面其局限性与挑战。
2、PIXOR介绍
2.1. 什么是PIXOR?
PIXOR是一种专为自动驾驶设计的3D目标检测模型,旨在从LiDAR点云数据中实时检测车辆、行人等物体。它通过将杂乱的3D点云转换为鸟瞰图(Bird’s Eye View,BEV),并利用全卷积神经网络进行检测,输出带有方向的3D边界框。PIXOR的优势在于其简洁的单阶段设计和较高的检测速度,但其性能在远距离和复杂场景下仍存在不足。
2.2. PIXOR如何工作?
PIXOR的工作流程可分为以下几个关键步骤:
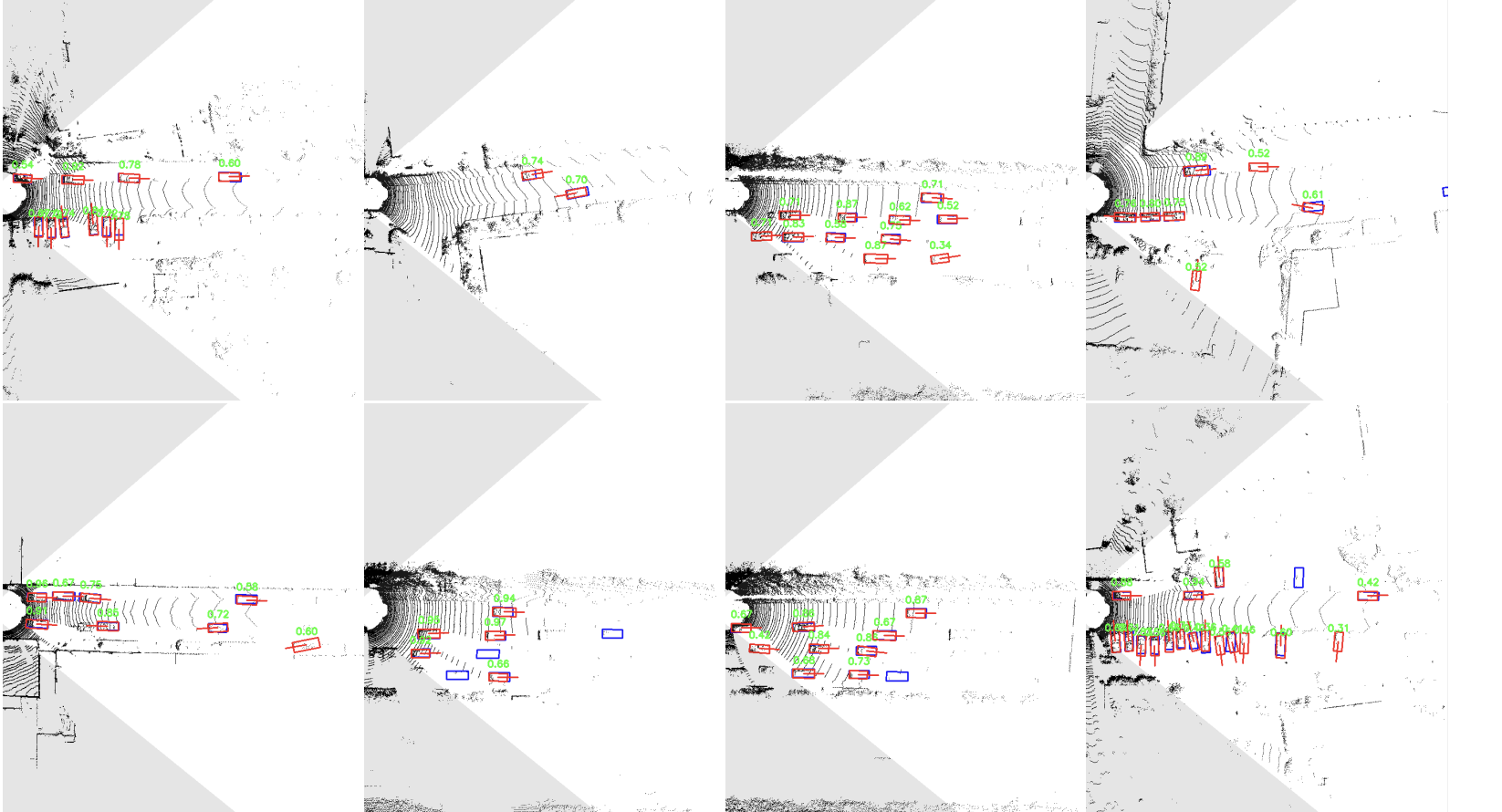
- 点云转鸟瞰图(BEV)
PIXOR将LiDAR点云投影到二维网格上,生成BEV表示。每个网格记录占用率(是否有物体)和反射强度。例如,在KITTI数据集中,PIXOR使用800x700的网格,叠加36个通道(高度和反射率)。
局限性:点云稀疏性导致远距离物体信息不足,高度压缩也丢失了部分三维特征,影响检测精度。 - 全卷积神经网络
PIXOR采用基于ResNet的Backbone网络提取特征,Header网络进行分类和回归预测。Header网络输出1个分类通道(置信度)和6个回归通道(边界框参数)。
局限性:小目标和遮挡物体检测效果不佳,网络对远距离物体的特征提取能力有限。 - 输出定向3D边界框
PIXOR为每个检测到的物体生成带有方向的3D边界框,包含中心位置、尺寸和朝向。
局限性:在远距离或点云稀疏区域,边界框定位精度下降,易产生误检。
3、表现和应用
3.1、PIXOR的性能表现
PIXOR在KITTI和TOR4D数据集上表现出色,但需注意其历史背景和评测细节:
- KITTI数据集(2012年)
PIXOR在0.7 IoU下的平均精度(AP)为75.74%,优于当时的MV3D(65.31%),且检测速度为35ms(GTX 1080Ti,1024×1024输入)。
局限性:KITTI数据主要来自德国郊区,无法代表现代城市复杂场景,且PIXOR在远距离(>50m)检测精度显著下降。 - TOR4D数据集
PIXOR在TOR4D上的AP为73.3%,展示了跨数据集的泛化能力。
局限性:TOR4D评测标准与KITTI不完全对齐,类别不平衡和难易样本分布可能影响AP的可比性。 - 与现代模型的对比
PIXOR(2018年)在当时领先,但相较于2023年的SOTA模型(如BEVFormer、CenterPoint),其在小目标和遮挡场景下的表现已落后。
建议:承认PIXOR的历史地位,但强调其在现代自动驾驶技术栈中的局限性。
3.2、PIXOR的应用场景
PIXOR在自动驾驶和机器人领域有潜在应用,但需注意其适用条件:
- 自动驾驶汽车
PIXOR可用于实时检测周围车辆和行人,但35ms的延迟在高速场景下可能不足,远距漏检率(>20%)也影响安全性。
建议:PIXOR更适合低速或测试场景,量产车需结合多传感器融合提升鲁棒性。 - 机器人导航
在室内或遮挡较少的室外环境,PIXOR可辅助机器人避障,但LiDAR在多反射表面(如玻璃)下易失效。
建议:结合超声波或摄像头优化室内应用。
3.3、PIXOR的局限性与挑战
PIXOR在实际应用中面临以下挑战:
- 远距离检测困难
点云稀疏导致远距离物体信息不足,PIXOR在50m以上检测精度急剧下降,易产生误检和漏检。 - 复杂场景下的遮挡问题
在拥挤或多物体遮挡场景中,PIXOR难以准确分割和定位重叠目标,影响检测完整性。 - 硬件依赖与部署成本
PIXOR依赖高性能GPU(如GTX 1080Ti),在车载嵌入式系统上的实时性难以保证,部署成本高昂。
4. PIXOR的未来展望
PIXOR的未来发展需直面技术瓶颈,以下是一些可行方向:
- 多传感器融合
结合摄像头或雷达,弥补LiDAR在远距离和恶劣天气下的不足。PIXOR可借鉴PointFusion等方案,优化融合策略。 - 神经网络优化
引入Transformer架构(如BEVFormer的注意力机制),提升对小目标和遮挡物体的检测能力,并探索轻量化设计以适应边缘计算。 - 数据增强与自监督学习
通过补点技术或自监督学习,缓解点云稀疏性问题,提升模型在远距离场景下的鲁棒性。
5. 结语
PIXOR作为2018年的创新之作,展示了BEV视角在3D检测中的潜力,但其在远距离、遮挡场景和嵌入式部署上的局限性已让它落后于时代。自动驾驶的未来需要更全面、更可靠的感知方案,而PIXOR的“鹰眼”光环,终将被技术演进的洪流所冲刷。作者建议读者在评估自动驾驶技术时,警惕数据崇拜和应用夸大,关注算法在真实场景中的表现与挑战。