《海空重力测量理论方法及应用》之一重力仪系统组成及工作原理(下)
2、三轴稳定平台型
稳定平台的作用是隔离测量载体角运动对重力观测量的影响,确保重力传感器的敏感轴方向始终与重向保持一致。
当前主流的海空重力仪使用的稳定平台方案主要有4种:
①双轴阻尼陀螺平台:
②)双轴惯导加捷联方位平台:
③三轴惯导平台;
④捷联惯导平台。
其中,前3种类型同属于物理平台,最后种为数学平台。双轴稳定平台只能隔离载体水平两轴方向的角运动,载体的方扰动变化仍然会影响重力观测数据的质量,因此相比较而言,基于双轴惯导加捷联方位平台和三轴惯导平台的重力仪,客观上受水平加速度的影响更小,具有更好的动态稳定性和更高的作业效益。
俄罗斯GT系列重力仪是三轴稳定平台型的典型。下图是GT-1A的结构图。
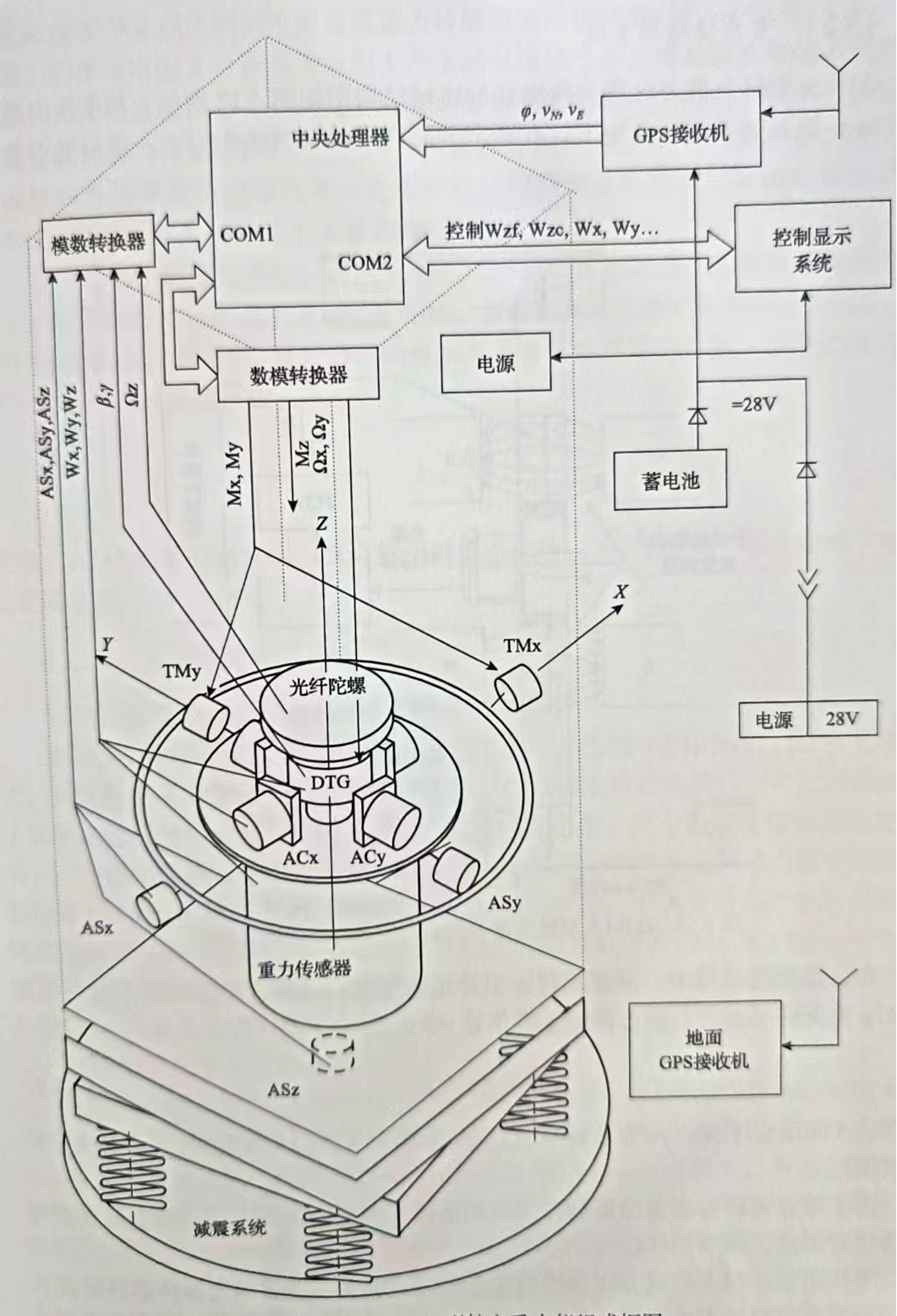
图中ASx、ASy、ASz角度传感器安装在平衡环的支撑轴和旋转平台的垂向轴上,用来测量俯仰、滚动和方位的角度。
GT-1A是一种航空型单垂向传感器(GPS+INS)组合标量重力仪,其控制平台为舒勒调谐三轴惯导平台。通过模数转换电路,中央处理器获得了水平加速度计输出信号Wx和Wy、重力校正信息、动力调谐陀螺(dynamic tuned gyroscope,DTG)观测角度β和γ、光纤陀螺输出。通过数模转换电路,中央处理器将生成的动力调谐陀螺控制信号Ωx和Ωy传送到动力调谐陀螺的力矩传感器,中央处理器产生的伺服系统控制信号(Mx和My)经功率放大后分别传送到力矩马达TMx和TMy,中央处理器产生的方位控制信号(Mz)传送到方位稳定器,使平台在地理坐标系中保持相对稳定。
高精度 GPS信息作为外部输人,将 GPS与惯导输出的位置信息和速度信息的差值作为量测值,构建一个最优化的卡尔曼(Kalman)滤波器,为稳定伺服系统和垂向陀螺校正系统提供控制算法,估计惯导系统的误差,在运动中对惯导系统进行校正,以控制其误差随时间的积累。在极其恶劣的测量环境下出现短暂的加速度计饱和时,系统能够自动降低卡尔曼滤波器的阶数来获取数据,计算平台未对准的位置,然后进行控制。这两种特性有助于提高系统对强气流等恶劣气候条件的适应性和容忍度(张开东等)。
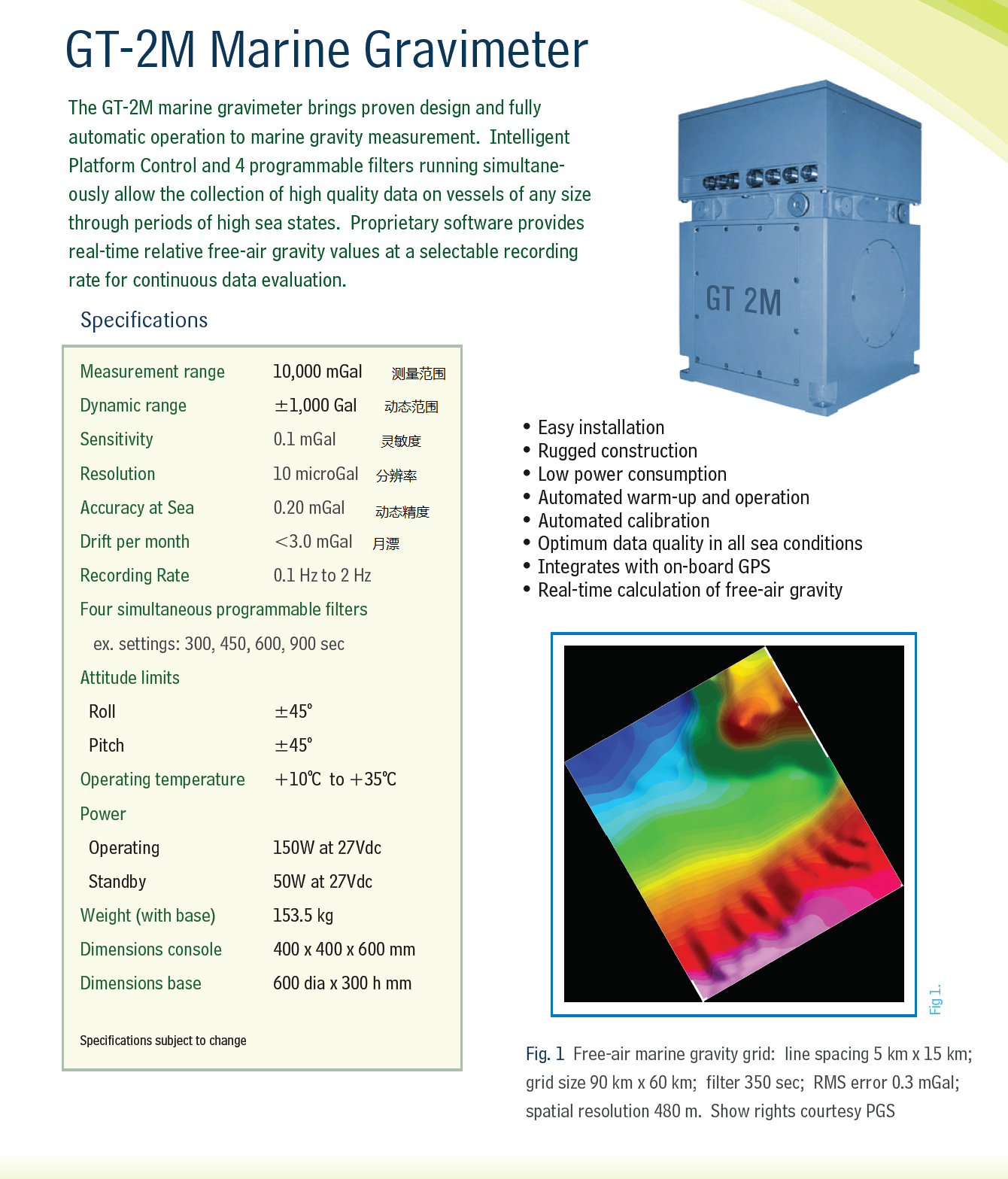
GT-2M海洋重力仪参数如下:
3、捷联惯导平台
基于捷联惯导系统的航空重力仪没有采用物理平台,而是采用捷联惯导系统,利用数学平台代替物理平台,因此结构更加简单,体积更小,操作更简便,可以实现无人操作。此类系统将三轴正交的加速度计固定于机体上,用于测量重力加速度矢量(比力);通过差分GPS测定飞机运动加速度,用于消除飞机运动加速度对重力测量的影响,因此该类系统不仅可进行重力标量测量,也可进行重力矢量测量。
下图是激光陀螺捷联惯导系统结构图。
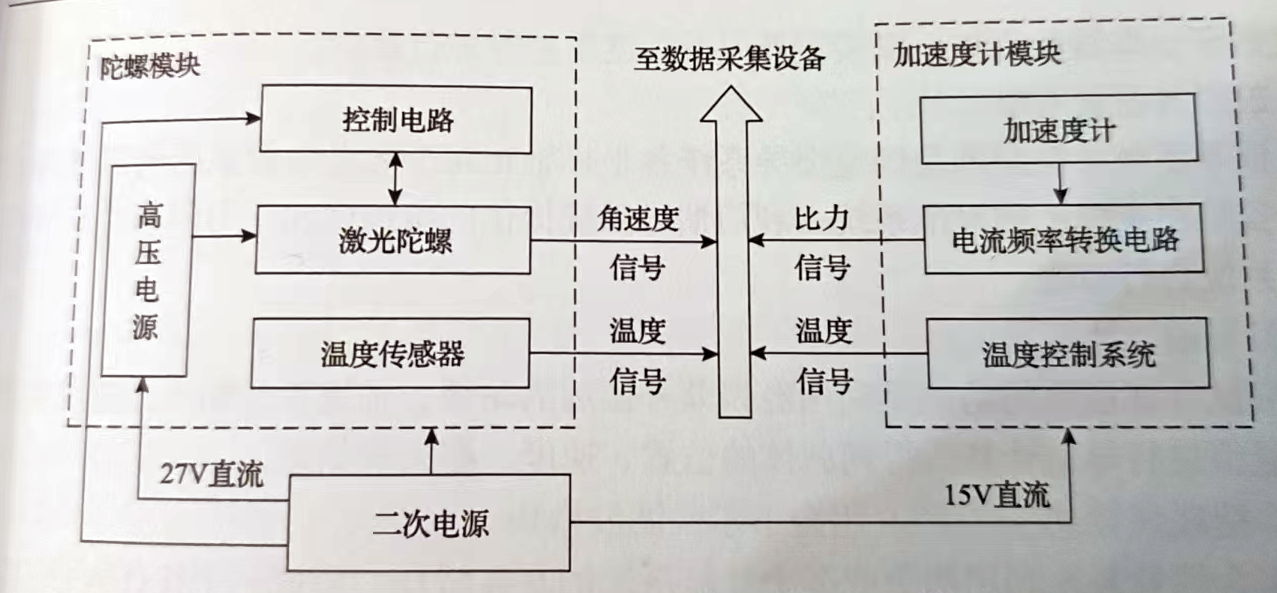
加速度计是捷联式重力仪的核心传感器,其分辨率、精度和稳定性直接决定重力测量系统的整体精度水平。加速度计的精度受温度的影响较大,因此需要对加速度计进行精密的温度控制。同时,数据采集设备同样受温度的影响较大,因此为了保证惯性导航精度,电流频率转换电路采用温度补偿技术实现全温范围内的测量精度保障。3个陀螺和3个加速度计都安装在一个刚性块上,该刚性块可直接或通过减震基座安装在载体的机体内。通常情况下,要求3个陀螺、3个加速度计在笛卡儿坐标系中相互正交。正交的敏感器可直接测量出角速度和比力在三个相互垂直的正交方向上的分量,为测量系统提供执行捷联计算任务所需的信息。
一个惯导系统通常包含3个加速度计,安装时3个加速度计的敏感轴相互垂直,每个加速度计可以检测到单一方向的加速度。
载体相对惯性坐标系的转动可以通过陀螺敏感器来检测,其观测值可用于确定加速度计每一时刻的方位。根据这些信息,可以把加速度分解到惯性坐标系。
惯导系统与载体固连在一起的集成系统称为捷联惯导系统,该系统包含提供角速度的3个陀螺、提供比力测最值的3个加速度计及其电流频率转换电路、数据采集板等。
惯导系统的观测误差随时间积累,因此需要采用外部观测量来提高平台的稳定性。平台惯导系统通常采用外部位置、速度阻尼来提高平台的稳定性。捷联惯导系统则通常利用卡尔曼滤波器进行SINS(strapdown inertial navigation system, 捷联惯导系统)/GNSS(差分)组合,以差分GNSS测得的高精度位置、速度为观测量,对惯导系统的位置、速度姿态以及惯性器件误差进行估计。
捷联惯导系统将惯性传感器直接固连在载体上,其承受的动态环境更加恶劣,因此要求惯性传感器具有更优的性能,如更大的动态范围、更高稳定性的刻度因子等。此外,利用载波相位差分GNSS测定载体运动加速度仍然是影响航空重力测量精度的一个关键环节。
下图是湖南艾恩斯科技有限公司DGship重力仪参数。

比较GT-2M和DGship的技术参数,DGship在动态范围和温度适应方面优于GT-2M,其他性能相当。GT-2M的灵敏度对应着DGship的分辨率,GT-2M分辨率应该是指数值记录位数。
参考文献
1、http://canadianmicrogravity.com/gt_2m_marine_gravimeter/
2、gt_2m_brochure.pdf
3、http://www.hins.com.cn/show-137-142-1.html