Husky目标跟踪
1.0设备清单
幻影峡谷、适配器
摄像头及数据线、显卡欺骗器
外接屏幕、键盘鼠标Husky底盘、便携显示屏、键盘鼠标
移动电源
1.1连线
- 插排——移动电源
- 幻影峡谷——适配器——插排
- 摄像头——幻影峡谷(摄像头固定在机械臂前方的底盘上)
- 键盘鼠标显示器——幻影峡谷/husky主机
1.2启动小车
先给husky开机,再给husky的工控机开机:


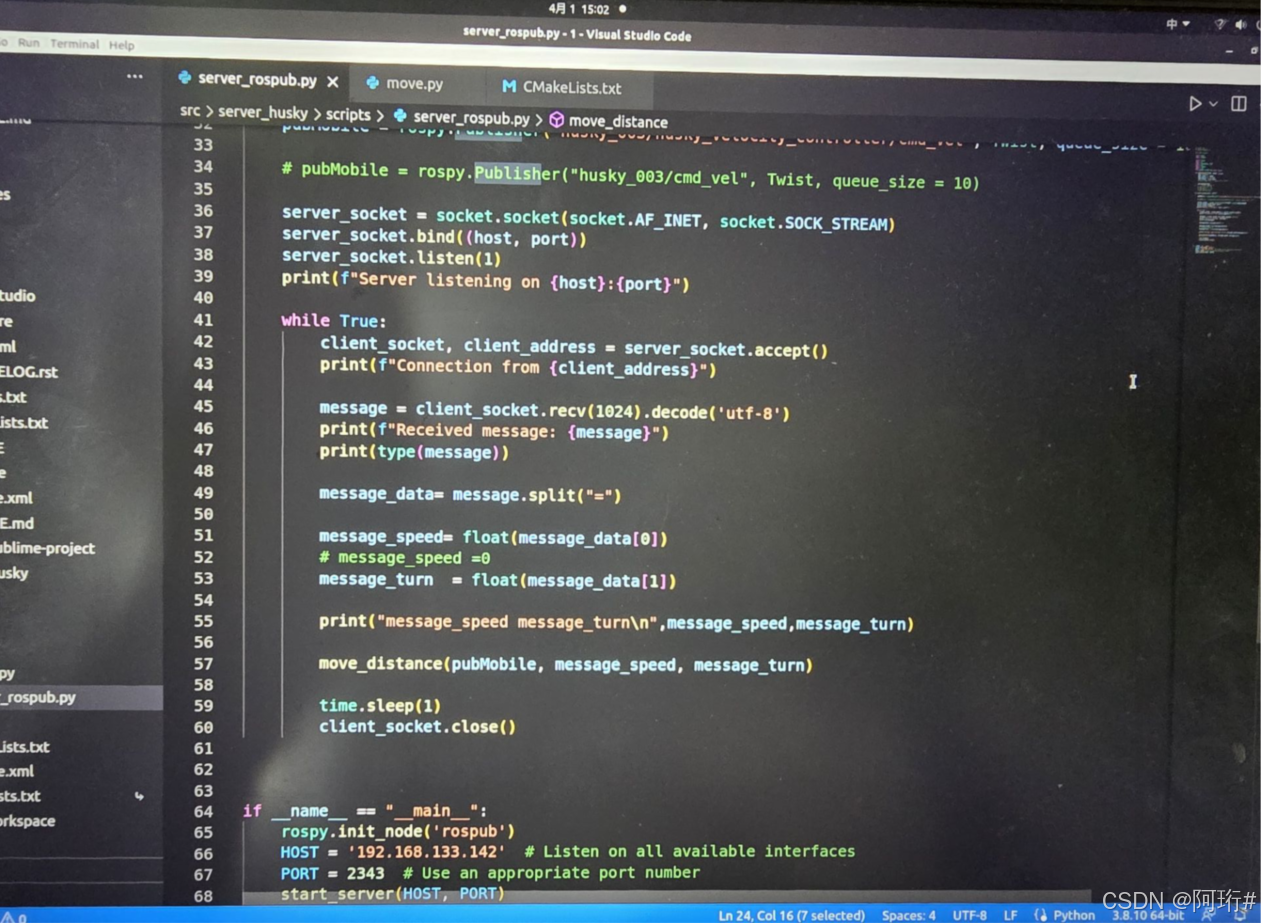
代码在桌面/1/src/server_husky/scripts/server_rospub.py
(开机后小车自动运行roscore,无需自己运行)

在vscode中打开后运行该代码即可。
1.3启动幻影峡谷
幻影峡谷开机、连接husky的wifi
平板通过teamviewer远程连接幻影峡谷
用pycharm打开所需代码:fastermot_husky
(虚拟环境为fastermot,pycharm里已经配置了环境)

打开项目中的track摄像头跟踪.py

平板(手机)与幻影峡谷都处于husky的wifi下,平板使用teamviewer远程连接主机:
访问的ip为192.168.12.30
访问密码为112Lab.+
连接成功后断开屏幕、鼠标键盘的有线连接
插上显卡欺骗器!
1.4 目标跟踪
确保摄像头固定住,且幻影峡谷没有与其它设备进行有线连接
目标位于机器人前方2m(程序设定跟踪目标id为1)
平板上运行track摄像头跟踪.py即可
若结束跟踪,在平板上的pycharm点停止或者husky的程序停止
1.5设备整理
跟踪完给移动电源充上电
1.6代码说明
husky数据接收端:
使用socket通讯建立连接,接收欢迎峡谷那边发送的前后和旋转速度(发送前用=连接,接受后判断=进行分割)
ros节点发布速度,底盘自动订阅进行移动。

目标跟踪数据发送端:
目标跟踪算法得到目标跟踪结果(track摄像头跟踪)后,调用utils里的xyz_true函数,计算机器人需要的移动速度;
计算出速度后调用client3中的velocity对数据进行编码和传输


