STM32 FATFS - 在flash上运行fatfs
参考文章cSTM32CubeMX学习笔记(25)——FatFs文件系统使用(操作SPI Flash)_stm32 fatfs-CSDN博客
例程地址:
STM32FatFS: 基于stm32的fatfs例程,配合博客文章
基于野火STM32MINI开发板
在W25Q64上进行FatFS的工作。这里先讲一下W25Q64的基本概念。
W25Q64是一款8MB容量的Flash芯片,由128个64KB的Block组成,每个Block包含16个4KB的Sector,支持以Sector(4KB)为最小擦除单位进行管理。
Page=256Byte
Sector=16Page=16x256=4096Byte=4KByte
Block=16Sector=16x4K=64KByte
W25Q64=128Block=128x64K=8192K=8MByte
STM32配置
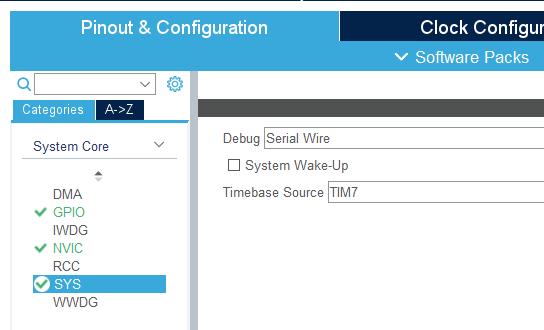
配置系统模式
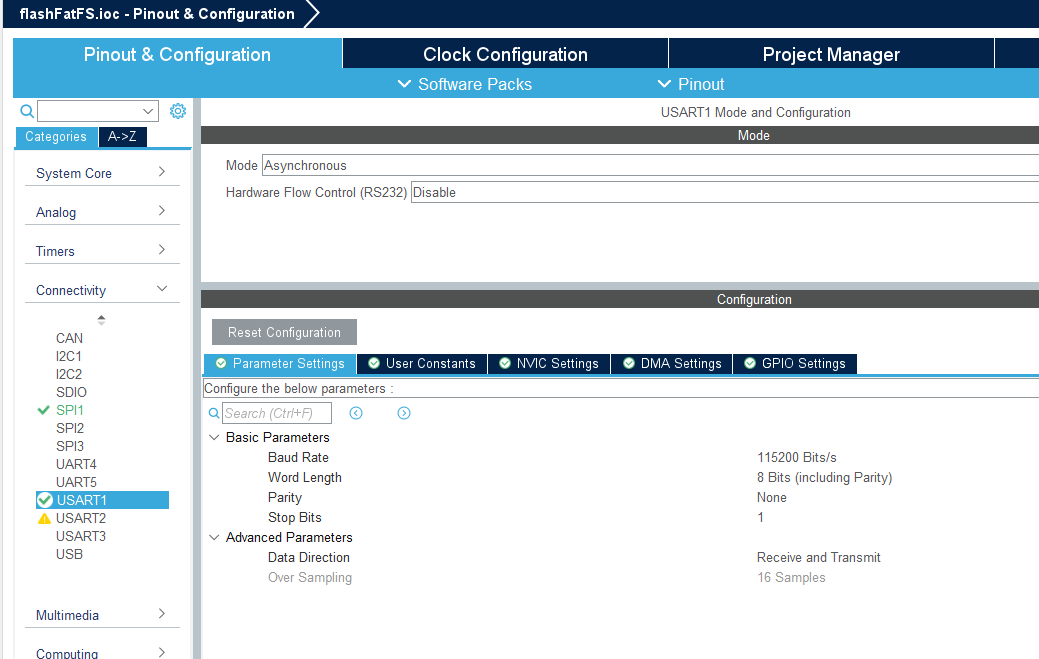
串口配置,用于打印log
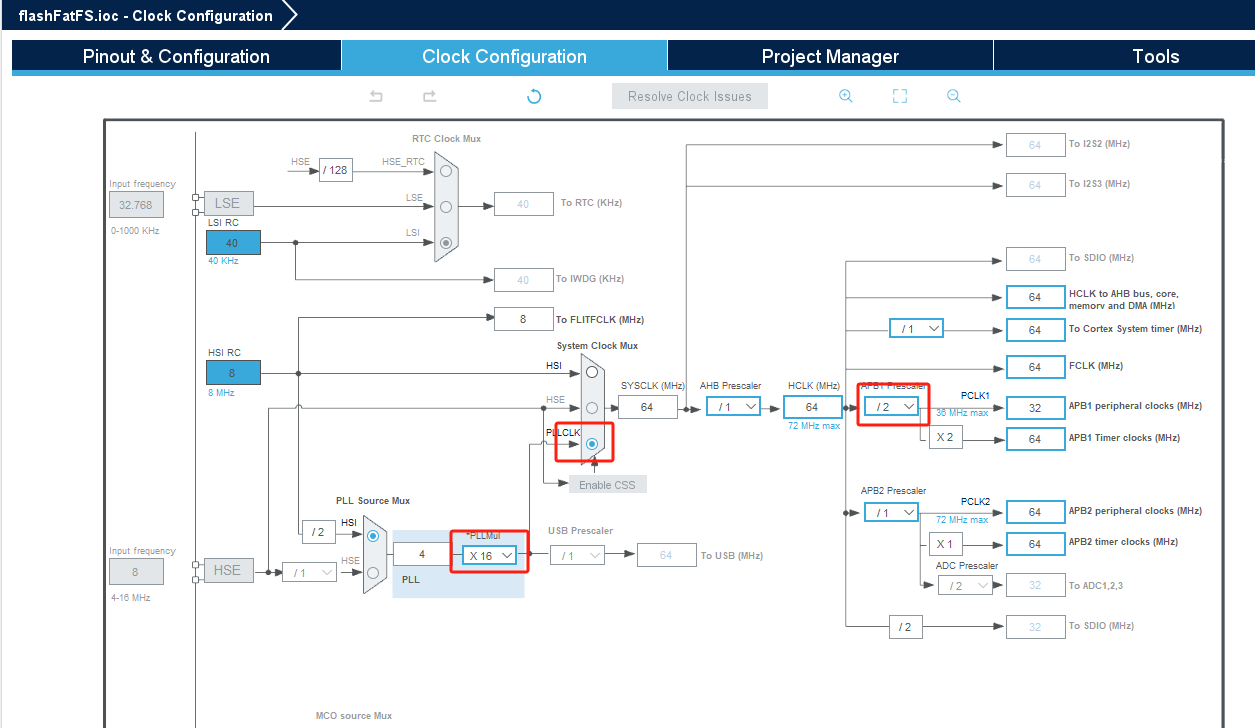
系统时钟配置,使用内部时钟,配置为64M,这部分不是必须的,只是想让处理更快,不配置完全可以
SPI配置,根据原理图使用的是SPI1端口,这里配置为全双工主模式,并且关闭硬件NSS,波特率分频为4,使用16MHz通讯,W25Q64 在标准 SPI 模式(单线模式)下的最大 SPI 时钟频率为 80 MHz,所以只要硬件设计的好,速率完全可以满足。根据 FLASH 芯片的说明,它支持 SPI 模式0 及 模式 3,支持双线全双工,使用 MSB 先行模式,数据帧长度为 8 位。
这里没有启用硬件NSS是因为尝试开启硬件NSS未成功,应该是连续读写时序不满足W25Q64。
配置FATFS
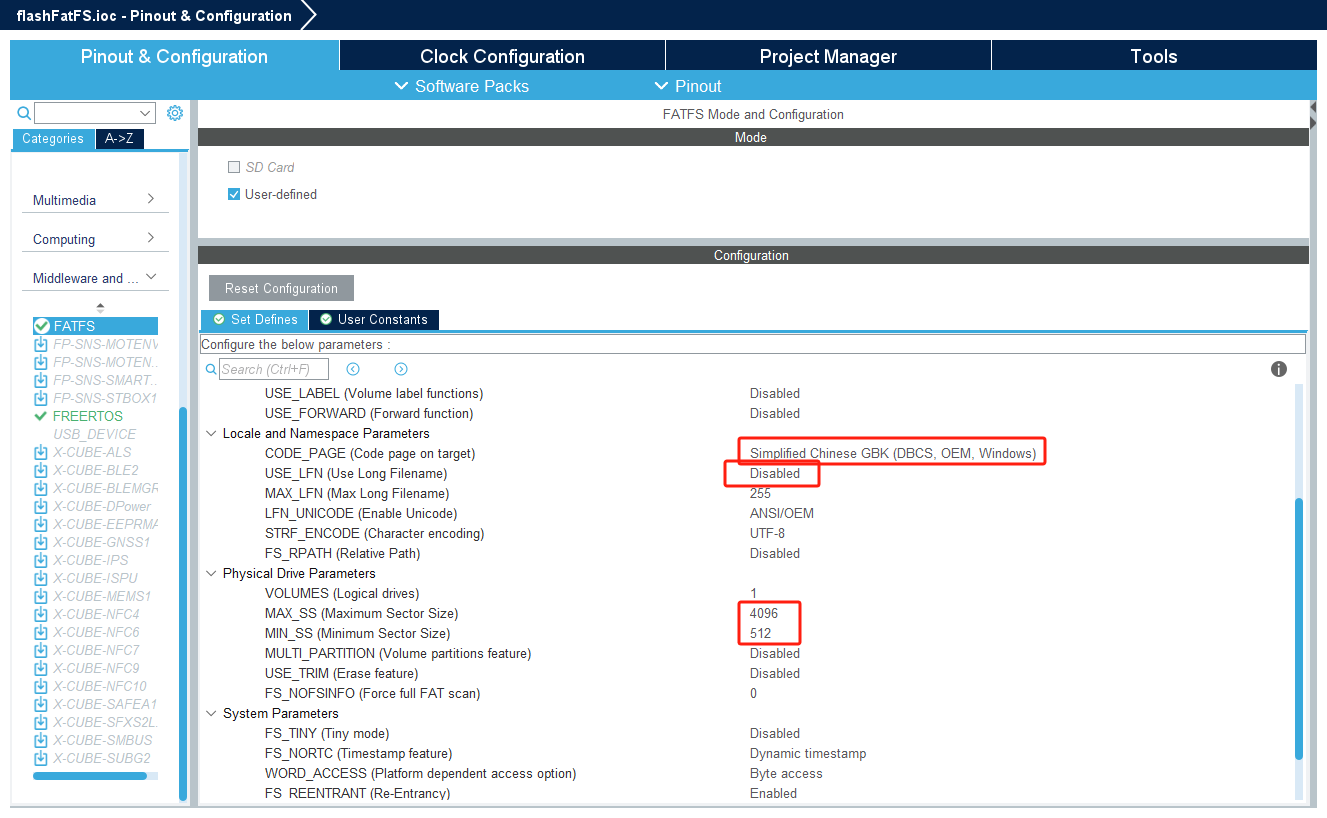
这里选择User-defined,因为我们是使用自己的SPI驱动。
CODE_PAGE(Code page on target): Simplified Chinese GBK(DBCS,OEM,Windows) 支持简体中文编码
USE_LFN(Use Long Filename): 支持长文件名,并指定使用栈空间为缓冲区,这里不建议使用,因为这个支持很耗费flash,如果你的单片机小于256k可能都配不上这个功能,只能限制一下自己的程序,控制文件名长度了。
关于长文件名的支持使用堆还是栈有如下说明:
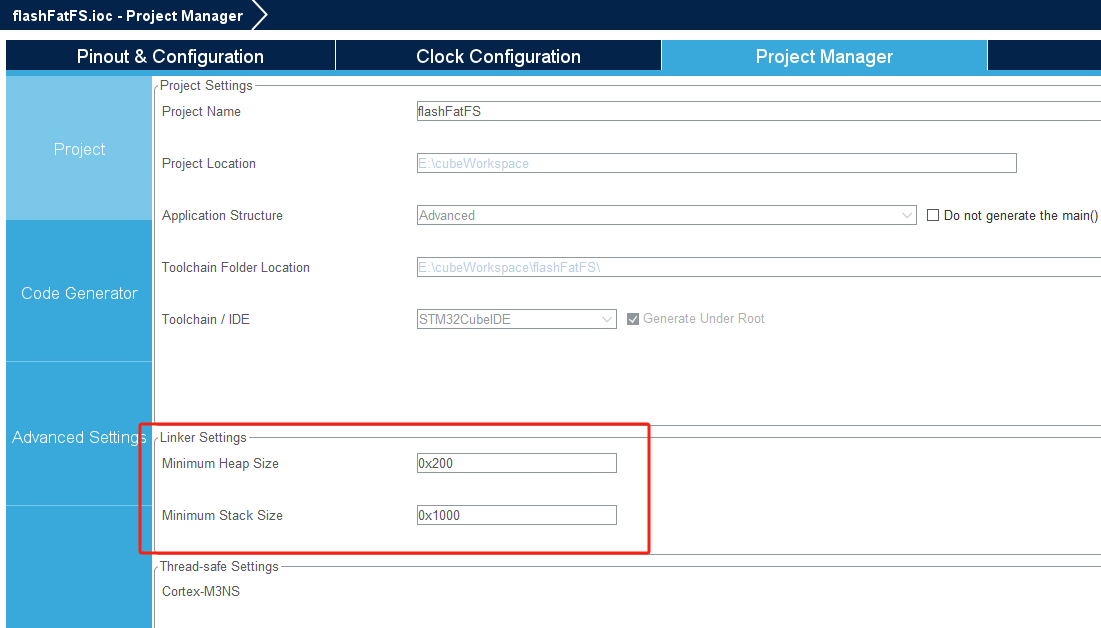
长文件名的选择,选择了对应的方式后需要修改工程的堆栈大小。
- 堆:适合需要动态、大容量且跨函数共享的数据,但需手动管理,易产生碎片。
- 栈:适合临时变量和局部数据,自动管理高效,但容量有限且生命周期受限。
- 优先选择栈:如果硬件资源有限(如STM32F1/F0等小容量芯片),且文件名长度较短、操作简单,通过增大栈空间并合理设计代码结构。
- 选择堆:如果硬件资源充足(如ESP32、STM32F4/F7等),且需要处理复杂或动态的文件名,或处于多任务环境。
VOLUMES(Logical drivers): 1 指定物理设备数量,我们只有一个 SPI Flash 芯片
MAX_SS(Maximum Sector Size): 4096 指定扇区大小的最大值。SD 卡扇区大小一般都为 512 字节,SPI Flash 芯片扇区大小一般设置为 4096 字节,所以需要把 _MAX_SS 改为 4096
MIN_SS(Minimum Sector Size): 512 指定扇区大小的最小值
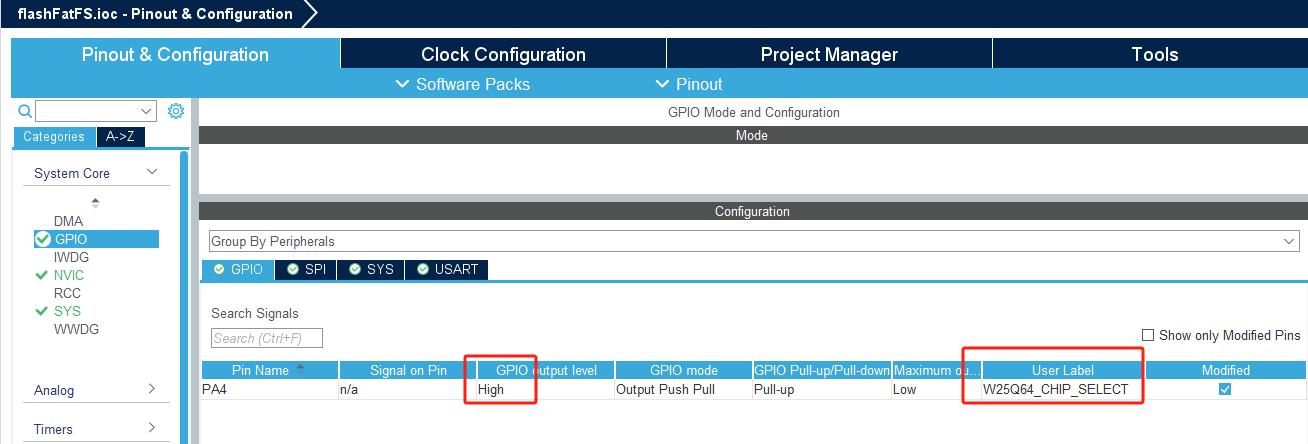
配置NSS的IO
因为驱动里面使用的W25Q64_CHIP_SELECT名字,这里需要添加label
配置FREERTOS
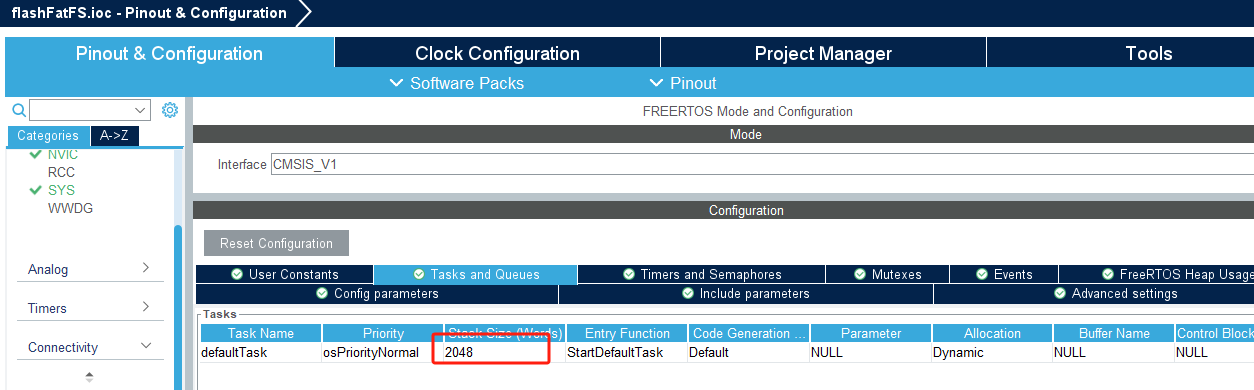
这里只能选择V1,因为FATFS调用了V1中的函数,如果选择V2编译不通过,这个只能等ST支持了。因为我在任务中打印了很多,所以需要增加任务的堆大小。
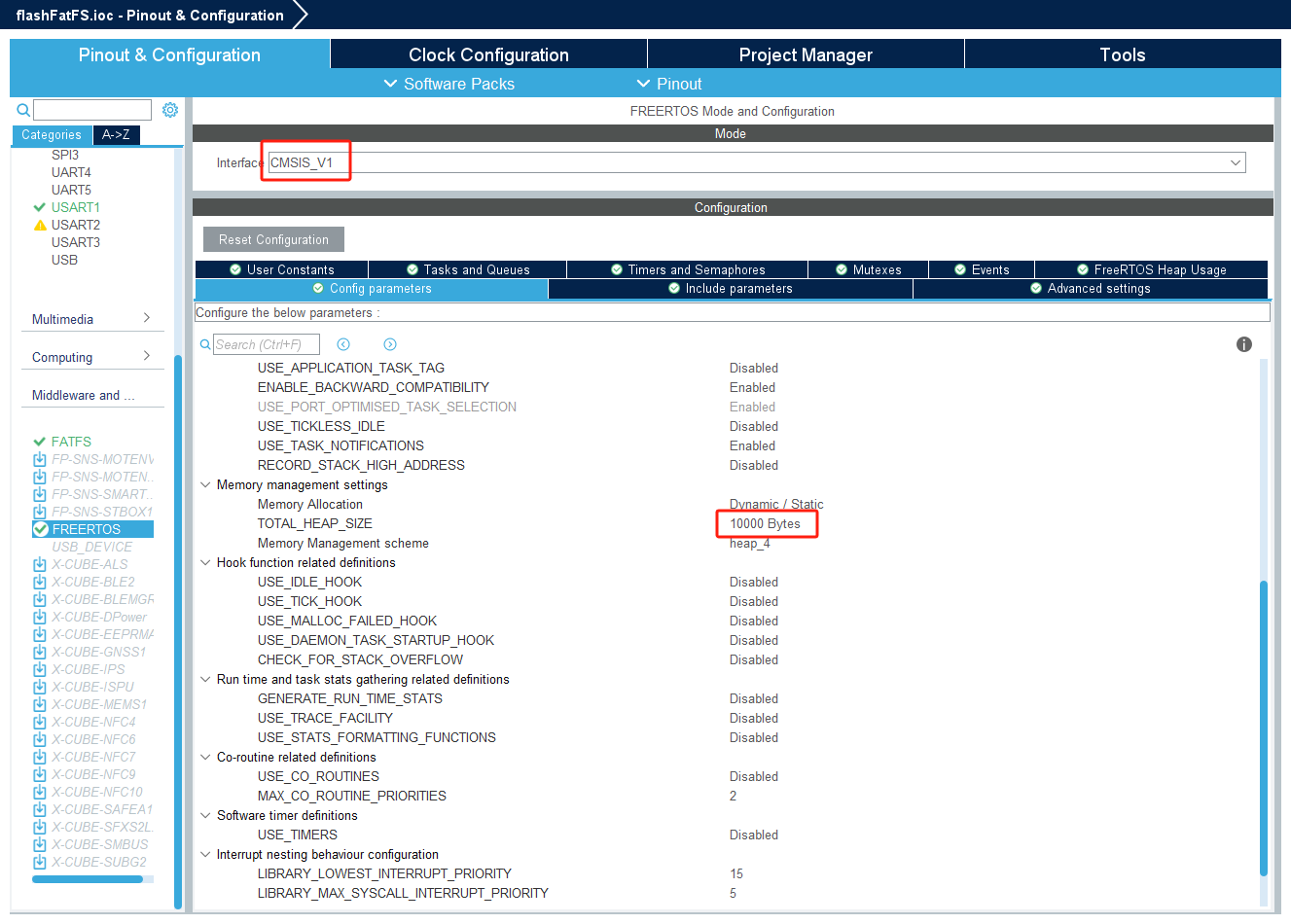
任务堆改为了2048
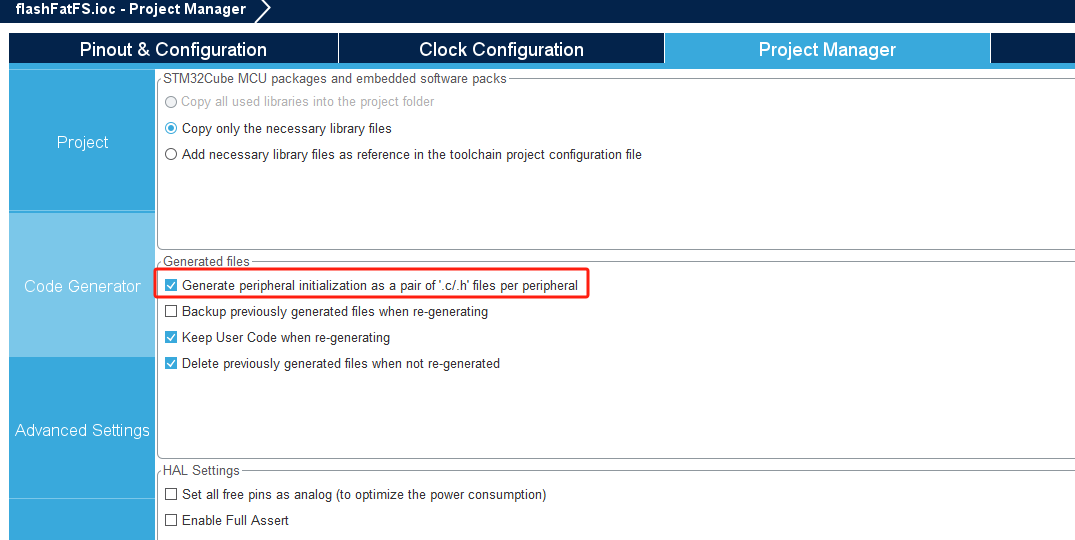
工程管理
设置为独立文件,这样后面引用头文件会方便些
如果你前面使用了长文件名支持需要在这里修改工程堆栈大小
代码
创建w25q64的驱动文件,我是图省事直接添加到了Core文件夹中,分别创建w25q64.h和w25q64.c
w25q64.h文件
#ifndef W25Q64_H
#define W25Q64_H
#include "spi.h"
// W25Q64的页大小是256字节
#define SPI_FLASH_PageSize 256
#define ManufactDeviceID_CMD 0x90
#define READ_STATU_REGISTER_1 0x05
#define READ_STATU_REGISTER_2 0x35
#define READ_DATA_CMD 0x03
#define WRITE_ENABLE_CMD 0x06
#define WRITE_DISABLE_CMD 0x04
#define SECTOR_ERASE_CMD 0x20
#define CHIP_ERASE_CMD 0xc7
#define PAGE_PROGRAM_CMD 0x02
/**
* @brief 使用SPI发送一个字节的数据
* @param byte:要发送的数据
* @retval 返回接收到的数据
*/
uint8_t SPI_FLASH_SendByte(uint8_t byte);
/**
* @brief 读取Flash内部的ID
* @param none
* @retval 成功返回device_id
*/
uint16_t W25QXX_ReadID(void);
/**
* @brief W25QXX写使能,将S1寄存器的WEL置位
* @param none
* @retval
*/
void W25QXX_Write_Enable(void);
/**
* @brief W25QXX写禁止,将WEL清零
* @param none
* @retval none
*/
void W25QXX_Write_Disable(void);
/**
* @brief W25QXX擦除一个扇区
* @param sector_addr —— 扇区地址 根据实际容量设置
* @retval none
* @note 阻塞操作
*/
void W25QXX_Erase_Sector(uint32_t sector_addr);
/**
* @brief 页写入操作
* @param dat —— 要写入的数据缓冲区首地址
* @param WriteAddr —— 要写入的地址
* @param byte_to_write —— 要写入的字节数(0-256)
* @retval none
*/
void W25QXX_PageProgram(uint8_t* dat, uint32_t WriteAddr, uint16_t nbytes);
/**
* @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度
* @retval 无
*/
void W25QXX_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);
/**
* @brief 读取FLASH数据
* @param pBuffer,存储读出数据的指针
* @param ReadAddr,读取地址
* @param NumByteToRead,读取数据长度
* @retval 无
*/
void W25QXX_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead);
#endif // W25Q64_Hw25q64.c文件
#include "w25q64.h"
#include "main.h"
#include <stdio.h>
#define SPI_FLASH_CS_LOW() HAL_GPIO_WritePin(W25Q64_CHIP_SELECT_GPIO_Port, W25Q64_CHIP_SELECT_Pin, GPIO_PIN_RESET);
#define SPI_FLASH_CS_HIGH() HAL_GPIO_WritePin(W25Q64_CHIP_SELECT_GPIO_Port, W25Q64_CHIP_SELECT_Pin, GPIO_PIN_SET);
/**
* @brief SPI发送指定长度的数据
* @param buf —— 发送数据缓冲区首地址
* @param size —— 要发送数据的字节数
* @retval 成功返回HAL_OK
*/
static HAL_StatusTypeDef SPI_Transmit(uint8_t* send_buf, uint16_t size)
{
return HAL_SPI_Transmit(&hspi1, send_buf, size, 100);
}
/**
* @brief SPI接收指定长度的数据
* @param buf —— 接收数据缓冲区首地址
* @param size —— 要接收数据的字节数
* @retval 成功返回HAL_OK
*/
static HAL_StatusTypeDef SPI_Receive(uint8_t* recv_buf, uint16_t size)
{
return HAL_SPI_Receive(&hspi1, recv_buf, size, 100);
}
/**
* @brief SPI在发送数据的同时接收指定长度的数据
* @param send_buf —— 接收数据缓冲区首地址
* @param recv_buf —— 接收数据缓冲区首地址
* @param size —— 要发送/接收数据的字节数
* @retval 成功返回HAL_OK
*/
static __attribute__((unused)) HAL_StatusTypeDef SPI_TransmitReceive(uint8_t* send_buf, uint8_t* recv_buf, uint16_t size)
{
return HAL_SPI_TransmitReceive(&hspi1, send_buf, recv_buf, size, 100);
}
/*等待超时时间*/
#define SPIT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define SPIT_LONG_TIMEOUT ((uint32_t)(10 * SPIT_FLAG_TIMEOUT))
static __IO uint32_t SPITimeout = SPIT_LONG_TIMEOUT;
/**
* @brief 等待超时回调函数
* @param None.
* @retval None.
*/
static uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode)
{
/* 等待超时后的处理,输出错误信息 */
printf("SPI 等待超时!errorCode = %d",errorCode);
return 0;
}
/**
* @brief 使用SPI发送一个字节的数据
* @param byte:要发送的数据
* @retval 返回接收到的数据
*/
uint8_t SPI_FLASH_SendByte(uint8_t byte)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待发送缓冲区为空,TXE事件 */
while (__HAL_SPI_GET_FLAG( &hspi1, SPI_FLAG_TXE ) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
}
/* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
WRITE_REG(hspi1.Instance->DR, byte);
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待接收缓冲区非空,RXNE事件 */
while (__HAL_SPI_GET_FLAG( &hspi1, SPI_FLAG_RXNE ) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
}
/* 读取数据寄存器,获取接收缓冲区数据 */
return READ_REG(hspi1.Instance->DR);
}
/**
* @brief 读取Flash内部的ID
* @param none
* @retval 成功返回device_id
*/
uint16_t W25QXX_ReadID(void)
{
uint8_t recv_buf[2] = {0}; //recv_buf[0]存放Manufacture ID, recv_buf[1]存放Device ID
uint16_t device_id = 0;
uint8_t send_data[4] = {ManufactDeviceID_CMD,0x00,0x00,0x00}; //待发送数据,命令+地址
/* 使能片选 */
SPI_FLASH_CS_LOW();
/* 发送并读取数据 */
if (HAL_OK == SPI_Transmit(send_data, 4))
{
if (HAL_OK == SPI_Receive(recv_buf, 2))
{
device_id = (recv_buf[0] << 8) | recv_buf[1];
}
}
/* 取消片选 */
SPI_FLASH_CS_HIGH();
return device_id;
}
/**
* @brief 读取W25QXX的状态寄存器,W25Q64一共有2个状态寄存器
* @param reg —— 状态寄存器编号(1~2)
* @retval 状态寄存器的值
*/
static uint8_t W25QXX_ReadSR(uint8_t reg)
{
uint8_t result = 0;
uint8_t send_buf[4] = {0x00,0x00,0x00,0x00};
switch(reg)
{
case 1:
send_buf[0] = READ_STATU_REGISTER_1;
case 2:
send_buf[0] = READ_STATU_REGISTER_2;
case 0:
default:
send_buf[0] = READ_STATU_REGISTER_1;
}
/* 使能片选 */
SPI_FLASH_CS_LOW();
if (HAL_OK == SPI_Transmit(send_buf, 4))
{
if (HAL_OK == SPI_Receive(&result, 1))
{
/* 取消片选 */
SPI_FLASH_CS_HIGH();
return result;
}
}
/* 取消片选 */
SPI_FLASH_CS_HIGH();
return 0;
}
/**
* @brief 阻塞等待Flash处于空闲状态
* @param none
* @retval none
*/
static void W25QXX_Wait_Busy(void)
{
while((W25QXX_ReadSR(1) & 0x01) == 0x01); // 等待BUSY位清空
}
/**
* @brief W25QXX写使能,将S1寄存器的WEL置位
* @param none
* @retval
*/
void W25QXX_Write_Enable(void)
{
uint8_t cmd= WRITE_ENABLE_CMD;
SPI_FLASH_CS_LOW();
SPI_Transmit(&cmd, 1);
SPI_FLASH_CS_HIGH();
W25QXX_Wait_Busy();
}
/**
* @brief W25QXX写禁止,将WEL清零
* @param none
* @retval none
*/
void W25QXX_Write_Disable(void)
{
uint8_t cmd = WRITE_DISABLE_CMD;
SPI_FLASH_CS_LOW();
SPI_Transmit(&cmd, 1);
SPI_FLASH_CS_HIGH();
W25QXX_Wait_Busy();
}
/**
* @brief W25QXX擦除一个扇区
* @param sector_addr —— 扇区地址 根据实际容量设置
* @retval none
* @note 阻塞操作
*/
void W25QXX_Erase_Sector(uint32_t sector_addr)
{
W25QXX_Write_Enable(); //擦除操作即写入0xFF,需要开启写使能
W25QXX_Wait_Busy(); //等待写使能完成
/* 使能片选 */
SPI_FLASH_CS_LOW();
/* 发送扇区擦除指令*/
SPI_FLASH_SendByte(SECTOR_ERASE_CMD);
/*发送擦除扇区地址的高位*/
SPI_FLASH_SendByte((sector_addr & 0xFF0000) >> 16);
/* 发送擦除扇区地址的中位 */
SPI_FLASH_SendByte((sector_addr & 0xFF00) >> 8);
/* 发送擦除扇区地址的低位 */
SPI_FLASH_SendByte(sector_addr & 0xFF);
/* 取消片选 */
SPI_FLASH_CS_HIGH();
W25QXX_Wait_Busy(); //等待扇区擦除完成
}
/**
* @brief 页写入操作
* @param dat —— 要写入的数据缓冲区首地址
* @param WriteAddr —— 要写入的地址
* @param byte_to_write —— 要写入的字节数(0-256)
* @retval none
*/
void W25QXX_PageProgram(uint8_t* dat, uint32_t WriteAddr, uint16_t nbytes)
{
uint8_t cmd = PAGE_PROGRAM_CMD;
// WriteAddr <<= 8;
W25QXX_Write_Enable();
/* 使能片选 */
SPI_FLASH_CS_LOW();
SPI_Transmit(&cmd, 1);
// SPI_Transmit((uint8_t*)&WriteAddr, 3);
uint8_t addr;
HAL_StatusTypeDef status;
/* 发送 读 地址高位 */
addr = (WriteAddr & 0xFF0000) >> 16;
status = SPI_Transmit(&addr, 1);
/* 发送 读 地址中位 */
addr = (WriteAddr & 0xFF00) >> 8;
status = SPI_Transmit(&addr, 1);
/* 发送 读 地址低位 */
addr = WriteAddr & 0xFF;
status = SPI_Transmit(&addr, 1);
(void) status;
SPI_Transmit(dat, nbytes);
/* 取消片选 */
SPI_FLASH_CS_HIGH();
W25QXX_Wait_Busy();
}
/**
* @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度
* @retval 无
*/
void W25QXX_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
uint8_t NumOfPage = 0;
uint8_t NumOfSingle = 0;
uint8_t Addr = 0;
uint8_t count = 0;
uint8_t temp = 0;
/*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/
Addr = WriteAddr % SPI_FLASH_PageSize;
/*差count个数据值,刚好可以对齐到页地址*/
count = SPI_FLASH_PageSize - Addr;
/*计算出要写多少整数页*/
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
/*mod运算求余,计算出剩余不满一页的字节数*/
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
/* Addr=0,则WriteAddr 刚好按页对齐 aligned */
if(Addr == 0)
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if(NumOfPage == 0)
{
W25QXX_PageProgram(pBuffer, WriteAddr, NumByteToWrite);
}
/* NumByteToWrite > SPI_FLASH_PageSize */
else
{
/*先把整数页都写了*/
while(NumOfPage--)
{
W25QXX_PageProgram(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
W25QXX_PageProgram(pBuffer, WriteAddr, NumOfSingle);
}
}
/* 若地址与 SPI_FLASH_PageSize 不对齐 */
else
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if(NumOfPage == 0)
{
/*当前页剩余的count个位置比NumOfSingle小,写不完*/
if(NumOfSingle > count)
{
temp = NumOfSingle - count;
/*先写满当前页*/
W25QXX_PageProgram(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
/*再写剩余的数据*/
W25QXX_PageProgram(pBuffer, WriteAddr, temp);
}
/*当前页剩余的count个位置能写完NumOfSingle个数据*/
else
{
W25QXX_PageProgram(pBuffer, WriteAddr, NumByteToWrite);
}
}
/* NumByteToWrite > SPI_FLASH_PageSize */
else
{
/*地址不对齐多出的count分开处理,不加入这个运算*/
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
W25QXX_PageProgram(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
/*把整数页都写了*/
while(NumOfPage--)
{
W25QXX_PageProgram(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
if(NumOfSingle != 0)
{
W25QXX_PageProgram(pBuffer, WriteAddr, NumOfSingle);
}
}
}
}
/**
* @brief 读取FLASH数据
* @param pBuffer,存储读出数据的指针
* @param ReadAddr,读取地址
* @param NumByteToRead,读取数据长度
* @retval 无
*/
void W25QXX_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{
W25QXX_Wait_Busy();
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送 读 指令 */
uint8_t cmd = READ_DATA_CMD;
SPI_Transmit(&cmd, 1);
// 不知道为什么连起来发不行
// ReadAddr = ReadAddr << 8;
// SPI_Transmit((uint8_t*)&ReadAddr, 3);
uint8_t addr;
HAL_StatusTypeDef status;
/* 发送 读 地址高位 */
addr = (ReadAddr & 0xFF0000) >> 16;
status = SPI_Transmit(&addr, 1);
/* 发送 读 地址中位 */
addr = (ReadAddr& 0xFF00) >> 8;
status = SPI_Transmit(&addr, 1);
/* 发送 读 地址低位 */
addr = ReadAddr & 0xFF;
status = SPI_Transmit(&addr, 1);
if(HAL_OK == status)
{
SPI_Receive(pBuffer, NumByteToRead);
}
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
}以上是驱动部分。
在mian.c中添加支持printf的函数
/* USER CODE BEGIN 0 */
int __io_putchar(int ch)
{
/* Implementation of __io_putchar */
/* e.g. write a character to the UART1 and Loop until the end of transmission */
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFFFFFF);
return ch;
}
int __io_getchar(void)
{
/* Implementation of __io_getchar */
char rxChar;
// This loops in case of HAL timeout, but if an ok or error occurs, we continue
while (HAL_UART_Receive(&huart1, (uint8_t *)&rxChar, 1, 0xFFFFFFFF) == HAL_TIMEOUT);
return rxChar;
}
/* USER CODE END 0 */修改FATFS\Target\user_diskio.c文件
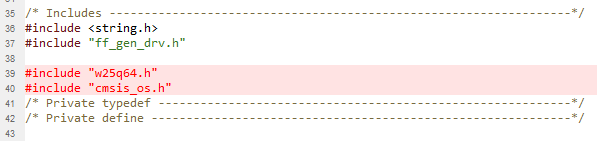
添加头文件
修改USER_initialize函数
DSTATUS USER_initialize (
BYTE pdrv /* Physical drive nmuber to identify the drive */
)
{
/* USER CODE BEGIN INIT */
/* 延时一小段时间 */
osDelay(10);
Stat = STA_NOINIT;
if (W25QXX_ReadID() != 0) {
Stat &= ~STA_NOINIT;
}
return Stat;
/* USER CODE END INIT */
}修改USER_status函数
DSTATUS USER_status (
BYTE pdrv /* Physical drive number to identify the drive */
)
{
/* USER CODE BEGIN STATUS */
Stat &= ~STA_NOINIT;
return Stat;
/* USER CODE END STATUS */
}修改USER_read函数
DRESULT USER_read (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
BYTE *buff, /* Data buffer to store read data */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to read */
)
{
/* USER CODE BEGIN READ */
DRESULT status = RES_PARERR;
if (!count) {
return RES_PARERR; // count不能等于0,否则返回参数错误
}
W25QXX_BufferRead(buff, sector<<12, count<<12);
status = RES_OK;
return status;
/* USER CODE END READ */
}这里有<<12操作,是因为USER_read传入的是扇区号,但是W25QXX_BufferRead函数是扇区地址,每个扇区大小为4096字节,所有使用<<12,其实就是乘以了4096
修改USER_write函数
DRESULT USER_write (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
const BYTE *buff, /* Data to be written */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to write */
)
{
/* USER CODE BEGIN WRITE */
/* USER CODE HERE */
uint32_t write_addr;
DRESULT status = RES_PARERR;
if (!count) {
return RES_PARERR; /* Check parameter */
}
write_addr = sector;
W25QXX_Erase_Sector(write_addr<<12);
W25QXX_BufferWrite((uint8_t *)buff, write_addr<<12, count<<12);
status = RES_OK;
return status;
/* USER CODE END WRITE */
}修改USER_ioctl函数
DRESULT USER_ioctl (
BYTE pdrv, /* Physical drive nmuber (0..) */
BYTE cmd, /* Control code */
void *buff /* Buffer to send/receive control data */
)
{
/* USER CODE BEGIN IOCTL */
DRESULT status = RES_OK;
switch (cmd) {
case CTRL_SYNC:
break;
/* 扇区数量:128个 Block × 16个 Sector/Block */
case GET_SECTOR_COUNT:
*(DWORD *)buff = 2048;
break;
/* 扇区大小 */
case GET_SECTOR_SIZE:
*(WORD *)buff = 4096;
break;
/* 同时擦除扇区个数 */
case GET_BLOCK_SIZE:
*(DWORD *)buff = 1;
break;
case CTRL_TRIM:
break;
default:
status = RES_PARERR;
break;
}
return status;
/* USER CODE END IOCTL */
}下面编写freertos中的实现功能
修改freertos.c文件
添加头文件
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "fatfs.h"
#include "w25q64.h"
/* USER CODE END Includes */在默认任务中添加测试内容
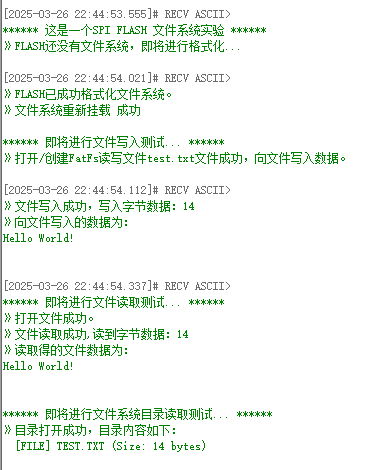
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
UINT fnum; /* 文件成功读写数量 */
int8_t ReadBuffer[1024] = {0}; /* 读缓冲区 */
int8_t WriteBuffer[]= "Hello World!\n";
W25QXX_Erase_Sector(0);
printf("****** 这是一个SPI FLASH 文件系统实验 ******\r\n");
// 在外部SPI Flash挂载文件系统,文件系统挂载时会对SPI设备初始化
retUSER = f_mount(&USERFatFS, USERPath, 1);
/*----------------------- 格式化测试 -----------------*/
/* 如果没有文件系统就格式化创建创建文件系统 */
if(retUSER == FR_NO_FILESYSTEM)
{
printf("》FLASH还没有文件系统,即将进行格式化...\r\n");
/* 格式化 */
retUSER = f_mkfs(USERPath, 0, 0);
if(retUSER == FR_OK)
{
printf("》FLASH已成功格式化文件系统。\r\n");
/* 格式化后,先取消挂载 */
retUSER = f_mount(NULL, USERPath, 1);
/* 重新挂载 */
retUSER = f_mount(&USERFatFS, USERPath, 1);
printf("》文件系统重新挂载 %s\r\n", retUSER == FR_OK ? "成功" : "失败");
}
else
{
printf("《《格式化失败。》》\r\n");
while(1) osDelay(1);
}
}
else if(retUSER != FR_OK)
{
printf("!!外部Flash挂载文件系统失败。(%d)\r\n", retUSER);
printf("!!可能原因:SPI Flash初始化不成功。\r\n");
while(1) osDelay(1);
}
else
{
printf("》文件系统挂载成功,可以进行读写测试\r\n");
}
/*----------------------- 文件系统测试:写测试 -------------------*/
printf("\r\n****** 即将进行文件写入测试... ******\r\n");
retUSER = f_open(&USERFile, "test.txt", FA_CREATE_ALWAYS | FA_WRITE);
if(retUSER == FR_OK)
{
printf("》打开/创建FatFs读写文件test.txt文件成功,向文件写入数据。\r\n");
/* 将指定存储区内容写入到文件内 */
retUSER = f_write(&USERFile, WriteBuffer, sizeof(WriteBuffer), &fnum);
if(retUSER == FR_OK)
{
printf("》文件写入成功,写入字节数据:%d\n", fnum);
printf("》向文件写入的数据为:\r\n%s\r\n", WriteBuffer);
}
else
{
printf("!!文件写入失败:(%d)\n", retUSER);
}
/* 不再读写,关闭文件 */
f_close(&USERFile);
}
else
{
printf("!!打开/创建文件失败。\r\n");
}
/*------------------- 文件系统测试:读测试 --------------------------*/
printf("****** 即将进行文件读取测试... ******\r\n");
retUSER = f_open(&USERFile, "test.txt",FA_OPEN_EXISTING | FA_READ);
if(retUSER == FR_OK)
{
printf("》打开文件成功。\r\n");
retUSER = f_read(&USERFile, ReadBuffer, sizeof(ReadBuffer), &fnum);
if(retUSER==FR_OK)
{
printf("》文件读取成功,读到字节数据:%d\r\n",fnum);
printf("》读取得的文件数据为:\r\n%s \r\n", ReadBuffer);
}
else
{
printf("!!文件读取失败:(%d)\n",retUSER);
}
}
else
{
printf("!!打开文件失败。\r\n");
}
/* 不再读写,关闭文件 */
f_close(&USERFile);
/*----------------------- 文件系统测试:读取目录测试 -------------------*/
printf("\r\n****** 即将进行文件系统目录读取测试... ******\r\n");
DIR dir;
FILINFO fno;
retUSER = f_opendir(&dir, USERPath);
if (retUSER == FR_OK) {
printf("》目录打开成功,目录内容如下:\r\n");
for (;;) {
retUSER = f_readdir(&dir, &fno);
if (retUSER != FR_OK || fno.fname[0] == 0) break;
if (fno.fattrib & AM_DIR) {
printf(" [DIR] %s\r\n", fno.fname);
} else {
printf(" [FILE] %s (Size: %ld bytes)\r\n", fno.fname, fno.fsize);
}
}
f_closedir(&dir);
} else {
printf("!!目录打开失败。(%d)\r\n", retUSER);
}
/* 不再使用文件系统,取消挂载文件系统 */
f_mount(NULL,"1:",1);
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}运行结果如下: